You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Modular Curves, Raindrops Through KaleidoscopesDocument11 pagesModular Curves, Raindrops Through Kaleidoscopespenttila86No ratings yet
- Section 5: Z-Transforms' & IIR-type Digital FiltersDocument18 pagesSection 5: Z-Transforms' & IIR-type Digital FiltersPopa MihaiNo ratings yet
- Exercise Sheet 10Document3 pagesExercise Sheet 10SAURABH VISHWAKARMANo ratings yet
- Functions of A Complex Variable (S1) Problem Sheet 3: University of Oxford Trinity Term 2012Document4 pagesFunctions of A Complex Variable (S1) Problem Sheet 3: University of Oxford Trinity Term 2012azzam almosaNo ratings yet
- Stanf215 NotesDocument128 pagesStanf215 NotesOscar Daniel ChávezNo ratings yet
- CV1 PDFDocument10 pagesCV1 PDFBrahim Ali AhmedNo ratings yet
- Rayleigh Drag EquationDocument5 pagesRayleigh Drag EquationDr. LawlisNo ratings yet
- Infi Nite Impulse Response Filters: Yn BXNK AynlDocument44 pagesInfi Nite Impulse Response Filters: Yn BXNK AynlPirata kalyNo ratings yet
- Complex Numbers ExplainedDocument5 pagesComplex Numbers ExplainedEngSafwanQadousNo ratings yet
- N Umeros Complejos y Plano ComplejoDocument4 pagesN Umeros Complejos y Plano ComplejoGerman ChiappeNo ratings yet
- EMT by Jakson PDFDocument145 pagesEMT by Jakson PDFSafi Ullah KhanNo ratings yet
- Course 146 - Note 2 Basics About Complex Numbers - Roots of Unity J.GillesDocument3 pagesCourse 146 - Note 2 Basics About Complex Numbers - Roots of Unity J.GillesJohnnyNo ratings yet
- Lecture 1Document4 pagesLecture 1Keerthana SundararajanNo ratings yet
- Math3 - CH - CRT Application and Laurent Series - Fall22-23Document8 pagesMath3 - CH - CRT Application and Laurent Series - Fall22-23Maruf Billah SiddikiNo ratings yet
- Integrated form of singular Mindlin’s solution for pile analysisDocument4 pagesIntegrated form of singular Mindlin’s solution for pile analysisMuhammad JunaidNo ratings yet
- Assign 2 PDFDocument5 pagesAssign 2 PDFghukato awomiNo ratings yet
- Chap 5Document24 pagesChap 5Jane NdindaNo ratings yet
- Math185f09 hw5Document3 pagesMath185f09 hw5Bob CrossNo ratings yet
- Pure Math - Complex NumbersDocument7 pagesPure Math - Complex Numbersjared liNo ratings yet
- Elliptic Functions Introduced as Infinite SumDocument35 pagesElliptic Functions Introduced as Infinite Sum胡政No ratings yet
- Bessel Functions: Appendix IvDocument16 pagesBessel Functions: Appendix IvAndy GreatNo ratings yet
- Quiz4 SolDocument19 pagesQuiz4 Soldjun033No ratings yet
- Pure Math - Complex NumbersDocument6 pagesPure Math - Complex Numbersjared liNo ratings yet
- Solid Analytic GeometryDocument7 pagesSolid Analytic GeometryBunkun15No ratings yet
- Transfer FunctionDocument16 pagesTransfer FunctionDebashish PalNo ratings yet
- Fem HelmholtzDocument9 pagesFem HelmholtzGautam SinghNo ratings yet
- DesignDocument8 pagesDesignAmiya Ranjan PaniNo ratings yet
- 08 Contour IntegrationvhdhdDocument14 pages08 Contour IntegrationvhdhdxhfakqaawuorgxbwneNo ratings yet
- Lab 4Document15 pagesLab 4Aliqpsk AlasadyNo ratings yet
- Assignment 4: Due October 19, 2016: LNZ ZDocument2 pagesAssignment 4: Due October 19, 2016: LNZ Zmir rownakNo ratings yet
- Chapter 3Document44 pagesChapter 3ERMIAS AmanuelNo ratings yet
- Mobius Transformation in TexDocument4 pagesMobius Transformation in Texosama hasanNo ratings yet
- Mobius Transformation in TexDocument4 pagesMobius Transformation in TexShalabh TiwariNo ratings yet
- The Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Document6 pagesThe Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Jorge OñateNo ratings yet
- 8 X TransferDocument12 pages8 X TransferTaku Angwa Otto CHENo ratings yet
- An Introduction to Elliptic Curves and Modular FormsDocument19 pagesAn Introduction to Elliptic Curves and Modular FormsJhon Edison Bravo BuitragoNo ratings yet
- 2.161 Signal Processing: Continuous and Discrete: Mit OpencoursewareDocument14 pages2.161 Signal Processing: Continuous and Discrete: Mit Opencoursewarelovelyosmile253No ratings yet
- 08 Contour IntegrationDocument13 pages08 Contour IntegrationMasud SarkerNo ratings yet
- B.Stat. (Hons.) & B.Math. (Hons.) Admission TestDocument10 pagesB.Stat. (Hons.) & B.Math. (Hons.) Admission TestStephan ReynoldsNo ratings yet
- Mathematical Association of AmericaDocument5 pagesMathematical Association of AmericaGerior FelizNo ratings yet
- DR ST - ETBS204-Module-5 (Text)Document82 pagesDR ST - ETBS204-Module-5 (Text)احمد الشوافيNo ratings yet
- DR ST Etbs204 Module 5Document82 pagesDR ST Etbs204 Module 5K SriNo ratings yet
- TT2223 Week 12a Z-TransformDocument39 pagesTT2223 Week 12a Z-TransformAjiMaulanaNo ratings yet
- Solutions To Midterm #2, Math 300: C 1/z N NDocument3 pagesSolutions To Midterm #2, Math 300: C 1/z N NAbdelwahab.gfNo ratings yet
- Assignment (Complex Analysis)Document1 pageAssignment (Complex Analysis)Tanmay NayakNo ratings yet
- Topper Smart Guide-2010 Class-Xii MathDocument80 pagesTopper Smart Guide-2010 Class-Xii MathSureshChoudhary0% (1)
- Introduction To Complex FunctionsDocument35 pagesIntroduction To Complex FunctionsDragos AlexandruNo ratings yet
- CH 12Document12 pagesCH 12primeludeNo ratings yet
- Complex Number FormulasDocument4 pagesComplex Number FormulasAdityaNo ratings yet
- Math3 Ch01 Complex VariableDocument11 pagesMath3 Ch01 Complex Variablepablo chanNo ratings yet
- TRANSFORMING THE FAKE MODULAR FORM OF WEIGHT 2Document3 pagesTRANSFORMING THE FAKE MODULAR FORM OF WEIGHT 2Xoloaccc AccountNo ratings yet
- Direct Design Methods: 1 + + + + + + + + Az Az HZ B BZ BZ Az Az BZ Az ........ ...... ........Document4 pagesDirect Design Methods: 1 + + + + + + + + Az Az HZ B BZ BZ Az Az BZ Az ........ ...... ........Sajid AhmedNo ratings yet
- 21.1 Cauchy Goursat TheoremDocument10 pages21.1 Cauchy Goursat TheoremNaga ArjunNo ratings yet
- 12 - 1 - 24c - F1B018074 - Baiq Hidayatul ZohriahDocument24 pages12 - 1 - 24c - F1B018074 - Baiq Hidayatul ZohriahRiki SaputraNo ratings yet
- Complex FunctionsDocument102 pagesComplex FunctionsRajesh100% (1)
- Lec 9cDocument9 pagesLec 9cAndrea LannesNo ratings yet
- Complex Analysis by SuccessclapDocument92 pagesComplex Analysis by SuccessclapradheNo ratings yet
- Mypdf 4Document1 pageMypdf 4Chris PhanNo ratings yet
- Mypdf 8Document1 pageMypdf 8Chris PhanNo ratings yet
- Mypdf 3Document1 pageMypdf 3Chris PhanNo ratings yet
- Mypdf 9Document1 pageMypdf 9Chris PhanNo ratings yet
- Mypdf 2Document1 pageMypdf 2Chris PhanNo ratings yet
- Mypdf 8Document1 pageMypdf 8Chris PhanNo ratings yet
- Juce TutorialDocument75 pagesJuce TutorialthroxNo ratings yet
- MypdfDocument1 pageMypdfChris PhanNo ratings yet
- Mypdf 7Document1 pageMypdf 7Chris PhanNo ratings yet
- Variants of Concern VOC Technical Briefing 18 - UK - 09 JUL 2021Document56 pagesVariants of Concern VOC Technical Briefing 18 - UK - 09 JUL 2021Two KadNo ratings yet
- COVID-19 conditions and deaths by age group in the US from 2020Document152 pagesCOVID-19 conditions and deaths by age group in the US from 2020Chris PhanNo ratings yet
- ATranslation Guide From Python 2 To CDocument88 pagesATranslation Guide From Python 2 To CJason JinNo ratings yet
- Problems With PCR TestingDocument2 pagesProblems With PCR TestingChris PhanNo ratings yet
- External Peer Review of The RTPCR Test To Detect SARS-CoV-2 Reveals 10 Major Scientific Flaws at The Molecular and Methodological Level: Consequences For False Positive ResultsDocument30 pagesExternal Peer Review of The RTPCR Test To Detect SARS-CoV-2 Reveals 10 Major Scientific Flaws at The Molecular and Methodological Level: Consequences For False Positive ResultsConstantin GrumazescuNo ratings yet
- Waltz - ScoreDocument16 pagesWaltz - ScoreChris PhanNo ratings yet
- COVID-19 conditions and deaths by age group in the US from 2020Document152 pagesCOVID-19 conditions and deaths by age group in the US from 2020Chris PhanNo ratings yet
- KA B200 - B200C POH (BB-734 Thru BB-1443Document1,309 pagesKA B200 - B200C POH (BB-734 Thru BB-1443JULIAN OCAMPO100% (2)
- Studi Kasus Pada PT Damar Bandha Jaya Corp. BogorDocument10 pagesStudi Kasus Pada PT Damar Bandha Jaya Corp. BogorMayHan13No ratings yet
- Android Activity Lifecycle OverviewDocument8 pagesAndroid Activity Lifecycle OverviewMario FedericiNo ratings yet
- Taeka HaileleulDocument167 pagesTaeka HaileleulBini100% (1)
- Muhammad Farrukh QAMAR - Assessment 2 Student Practical Demonstration of Tasks AURAMA006 V2Document19 pagesMuhammad Farrukh QAMAR - Assessment 2 Student Practical Demonstration of Tasks AURAMA006 V2Rana Muhammad Ashfaq Khan0% (1)
- Senior Power Apps Engineer JobDocument3 pagesSenior Power Apps Engineer JobMichałNo ratings yet
- Conversion Cycle (Process Cost) : Rizal Technological UniversityDocument25 pagesConversion Cycle (Process Cost) : Rizal Technological UniversityHatdogNo ratings yet
- G25M R TransmissionDocument29 pagesG25M R TransmissionMaksym VovkNo ratings yet
- GCMS-QP2010 User'sGuide (Ver2.5) PDFDocument402 pagesGCMS-QP2010 User'sGuide (Ver2.5) PDFnguyenvietanhbtNo ratings yet
- NCM 105-Lesson 2Document68 pagesNCM 105-Lesson 2Roshin TejeroNo ratings yet
- Grade 7 Lesson: Module 4 - Acids and BasesDocument3 pagesGrade 7 Lesson: Module 4 - Acids and BasesJoedelyn Wagas100% (4)
- Rapid Web Development With Python/Django: Julian HillDocument37 pagesRapid Web Development With Python/Django: Julian Hilljppn33No ratings yet
- DTC Codes Mercedes CPC4 EnglishDocument24 pagesDTC Codes Mercedes CPC4 Englishjonny david martinez perez100% (1)
- HZVDocument6 pagesHZVnurrozaqNo ratings yet
- Growatt Warranty Procedure - 07-09-2020Document9 pagesGrowatt Warranty Procedure - 07-09-2020Design TeamNo ratings yet
- Biotensegrity and Myofascial Chains A Global Approach To An Integrated Kinetic ChainDocument8 pagesBiotensegrity and Myofascial Chains A Global Approach To An Integrated Kinetic ChainMohamed ElMeligieNo ratings yet
- Maruti Institute of Nursing, Itarsi: Maternal Nursing Child Health Nursing Medical Surgical Nursing Nursing FoundationDocument4 pagesMaruti Institute of Nursing, Itarsi: Maternal Nursing Child Health Nursing Medical Surgical Nursing Nursing FoundationHarshaNo ratings yet
- WellBeing I193 2021Document164 pagesWellBeing I193 2021lan tranNo ratings yet
- New Product Performance Advantages For Extending Large, Established Fast Moving Consumer Goods (FMCG) BrandsDocument18 pagesNew Product Performance Advantages For Extending Large, Established Fast Moving Consumer Goods (FMCG) Brandssmart_kidzNo ratings yet
- Types of DC Motors Notes Electric DrivesDocument77 pagesTypes of DC Motors Notes Electric DrivesJyothish VijayNo ratings yet
- YLE - Top Tips and Common MistakesDocument15 pagesYLE - Top Tips and Common Mistakeskuvan alievNo ratings yet
- Quarter 1 - Module 1: (Traditions and Locations: The Filipino Poem (A Long History of Poetry)Document31 pagesQuarter 1 - Module 1: (Traditions and Locations: The Filipino Poem (A Long History of Poetry)Sicnarf Rolag0% (1)
- Review of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesDocument6 pagesReview of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesWilliam TortorielloNo ratings yet
- Lean Healthy Raw Food Winter RecipesDocument60 pagesLean Healthy Raw Food Winter RecipesKaio Sol100% (6)
- VW Crafter 2f Component Locations EngDocument118 pagesVW Crafter 2f Component Locations EngHugo Emilio Garcia Gonzalez100% (2)
- Myths of Membership The Politics of Legitimation in UN Security Council ReformDocument20 pagesMyths of Membership The Politics of Legitimation in UN Security Council ReformCaroline GassiatNo ratings yet
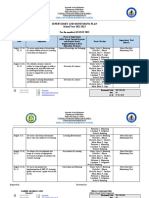
- Supervisory Plan 2022 2023Document4 pagesSupervisory Plan 2022 2023Jesieca Bulauan100% (12)
- THICKWALL CYLINDERS AND PRESS FITSDocument10 pagesTHICKWALL CYLINDERS AND PRESS FITSankitaNo ratings yet
- 1Document5 pages1qweqweNo ratings yet
- 255 Introduction Vocational Service enDocument12 pages255 Introduction Vocational Service enDmitri PopaNo ratings yet