You might also like
- Learn Python Quickly and Python Coding Exercises Coding For Beginners B08RDY478FDocument124 pagesLearn Python Quickly and Python Coding Exercises Coding For Beginners B08RDY478FAbel EkwonyeasoNo ratings yet
- Digital SAT Math Problem Set 13Document7 pagesDigital SAT Math Problem Set 13wwwmacyNo ratings yet
- Prisoner's Dilemma SlidesDocument44 pagesPrisoner's Dilemma SlidesMaksim TsvetovatNo ratings yet
- Consulting Skills Test ResourcesDocument3 pagesConsulting Skills Test ResourcesArmanbekAlkin100% (2)
- Kom Unit 2Document24 pagesKom Unit 2Muthuvel M100% (3)
- Lu DecompositionDocument33 pagesLu DecompositionEngrFaisalNo ratings yet
- Analytical Kinematics: Analysis and Synthesis of Planar MechanismsFrom EverandAnalytical Kinematics: Analysis and Synthesis of Planar MechanismsRating: 5 out of 5 stars5/5 (3)
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- UNIT 1. Introduction To KOM PDFDocument40 pagesUNIT 1. Introduction To KOM PDFAravind MuddebihalNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Kom Mod4@Azdocuments - inDocument19 pagesKom Mod4@Azdocuments - inM. Sadiq. A. PachapuriNo ratings yet
- 1 PDFDocument31 pages1 PDFhod meNo ratings yet
- Mechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismsDocument11 pagesMechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismscataiceNo ratings yet
- Dynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFDocument31 pagesDynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFmanfredm6435No ratings yet
- Kinematics of Machinery 2 Marks All 5 UnitsDocument18 pagesKinematics of Machinery 2 Marks All 5 UnitsvelavansuNo ratings yet
- Acceleration in MechanismsDocument22 pagesAcceleration in Mechanismsadilshahzad2001100% (2)
- Analysis of Whitworth Quick ReturnDocument8 pagesAnalysis of Whitworth Quick ReturnOdeniyi JeremiahNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- KOM-1 2 MarksDocument64 pagesKOM-1 2 MarksrajeshNo ratings yet
- Kinematics of Machinery - 2 Marks - All 5 UnitsDocument18 pagesKinematics of Machinery - 2 Marks - All 5 UnitsMohan Prasad.M94% (16)
- Analytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryDocument6 pagesAnalytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryAmit MondalNo ratings yet
- Unit 9B Acceleration Diagrams: Anaiy818 8lngi0 and Oompwnd Link# in Planar MotionDocument13 pagesUnit 9B Acceleration Diagrams: Anaiy818 8lngi0 and Oompwnd Link# in Planar MotionSubramanian ChidambaramNo ratings yet
- T235 - 1Blk 5.2Document13 pagesT235 - 1Blk 5.2PoojaSinghNo ratings yet
- Rashid Jazzy Alotaibi - ADJUSTABLE SLIDE DRIVE MECHANISMDocument6 pagesRashid Jazzy Alotaibi - ADJUSTABLE SLIDE DRIVE MECHANISMTerminator941988No ratings yet
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocument9 pagesPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentNo ratings yet
- Kinematics of Machinery (Me35) - 1 PDFDocument15 pagesKinematics of Machinery (Me35) - 1 PDFPraveen RajaNo ratings yet
- Module 1 - MechanismsDocument41 pagesModule 1 - MechanismsB03Kavya MNo ratings yet
- VCS REPORT FinalDocument7 pagesVCS REPORT Finalasd108533No ratings yet
- Theory of Machines & Mechanisms MCT 2212Document33 pagesTheory of Machines & Mechanisms MCT 2212MUKABBIR AHAMED RAFAT 1703119No ratings yet
- Mech-Iv-Kinematics of Machines (10me44) - Notes PDFDocument196 pagesMech-Iv-Kinematics of Machines (10me44) - Notes PDFgopalNo ratings yet
- Mom Write Up Manual IMEDocument39 pagesMom Write Up Manual IMEbalochfrahan.2003No ratings yet
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocument43 pagesPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNo ratings yet
- MEC291 Dynamic Crank and Slider2Document9 pagesMEC291 Dynamic Crank and Slider2Amir ArsyadNo ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Tom ImpDocument27 pagesTom Impcorruptmail760No ratings yet
- Machine Elements NotesDocument97 pagesMachine Elements Notessharneybasiga2No ratings yet
- 2020me518 MomDocument43 pages2020me518 MomMuhammad HammadNo ratings yet
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITDocument60 pagesRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524No ratings yet
- Kom Unit 1Document5 pagesKom Unit 1M.ThirunavukkarasuNo ratings yet
- Module 1 & First Half of 2 - Two Marks Q & ADocument8 pagesModule 1 & First Half of 2 - Two Marks Q & AMOHAMMED ZAHID BNo ratings yet
- CAM MechanismDocument15 pagesCAM MechanismAshrut AryalNo ratings yet
- Linkage AnalysisDocument42 pagesLinkage Analysiskefiyalew agegnNo ratings yet
- Econtents of TomDocument88 pagesEcontents of TomSuraj 1212No ratings yet
- Ijsrdv1i9084 PDFDocument2 pagesIjsrdv1i9084 PDFKanaga VaratharajanNo ratings yet
- Theory of Machine (9050)Document7 pagesTheory of Machine (9050)Candice Andrews25% (4)
- Tutorial 3 19BME069Document14 pagesTutorial 3 19BME06920BME005 INAM SABRINo ratings yet
- MECHANICS OF MACHINES-Lecture7-1Document43 pagesMECHANICS OF MACHINES-Lecture7-1Abdul RahmanNo ratings yet
- Catia Digital Mock UpDocument31 pagesCatia Digital Mock UpslitantNo ratings yet
- UntitledDocument56 pagesUntitledSarumathySundaramNo ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- University Institute of Engineering Department MechanicalDocument35 pagesUniversity Institute of Engineering Department MechanicalKhushi bhandariNo ratings yet
- Syllabus (New2013 Pattern) - TOM-IDocument14 pagesSyllabus (New2013 Pattern) - TOM-IAkshayNo ratings yet
- Topic 01 - IntroductionDocument53 pagesTopic 01 - IntroductionZAID BIN TAHIRNo ratings yet
- Rotational Motion and DynamicsDocument128 pagesRotational Motion and Dynamicstiredstudent03No ratings yet
- KOM Tutorial Book-2019-20 VK Es1Document12 pagesKOM Tutorial Book-2019-20 VK Es1Vinoth KumarNo ratings yet
- KDM 6Document54 pagesKDM 6KarthikeyanRamanujamNo ratings yet
- AT6302 - Mechanics of Machines - Part ADocument13 pagesAT6302 - Mechanics of Machines - Part ApavanraneNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- KomDocument12 pagesKomSasi KumarNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Movement Equations 2: Mathematical and Methodological SupplementsFrom EverandMovement Equations 2: Mathematical and Methodological SupplementsNo ratings yet
- 2KL20ME009 RV March 2023Document1 page2KL20ME009 RV March 2023M. Sadiq. A. PachapuriNo ratings yet
- 2KL20ME027 RV March 2023Document1 page2KL20ME027 RV March 2023M. Sadiq. A. PachapuriNo ratings yet
- Amp NTS 2022 (Faq)Document4 pagesAmp NTS 2022 (Faq)M. Sadiq. A. PachapuriNo ratings yet
- Rashtriya Ekta Diwas 001Document2 pagesRashtriya Ekta Diwas 001M. Sadiq. A. PachapuriNo ratings yet
- SCHEDULEDocument1 pageSCHEDULEM. Sadiq. A. PachapuriNo ratings yet
- 2KL20ME028 RV March 2023Document1 page2KL20ME028 RV March 2023M. Sadiq. A. PachapuriNo ratings yet
- 2KL20ME007 RV March 2023Document1 page2KL20ME007 RV March 2023M. Sadiq. A. PachapuriNo ratings yet
- Modelling and Analysis Lab Manual: (I Sem, M.E Manufacturing Engineering)Document178 pagesModelling and Analysis Lab Manual: (I Sem, M.E Manufacturing Engineering)M. Sadiq. A. PachapuriNo ratings yet
- NTS 2022 Daily Update (29.10.2022)Document11 pagesNTS 2022 Daily Update (29.10.2022)M. Sadiq. A. PachapuriNo ratings yet
- Amp NTS 2022 BrochureDocument12 pagesAmp NTS 2022 BrochureM. Sadiq. A. PachapuriNo ratings yet
- Kom Mod2@Azdocuments - inDocument15 pagesKom Mod2@Azdocuments - inM. Sadiq. A. PachapuriNo ratings yet
- Evaluation of Student ProjectsDocument11 pagesEvaluation of Student ProjectsM. Sadiq. A. PachapuriNo ratings yet
- Name Corr-21-22Document1 pageName Corr-21-22M. Sadiq. A. PachapuriNo ratings yet
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)M. Sadiq. A. PachapuriNo ratings yet
- Adv RAs MAE ASHOK 26 July 2021Document2 pagesAdv RAs MAE ASHOK 26 July 2021M. Sadiq. A. PachapuriNo ratings yet
- 44S SPP Sanctioned Projects ListDocument240 pages44S SPP Sanctioned Projects ListM. Sadiq. A. PachapuriNo ratings yet
- College of Engineering & TechnologyDocument8 pagesCollege of Engineering & TechnologyM. Sadiq. A. PachapuriNo ratings yet
- PG - Tier I - SARDocument43 pagesPG - Tier I - SARM. Sadiq. A. PachapuriNo ratings yet
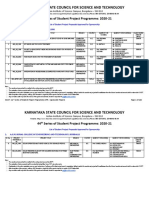
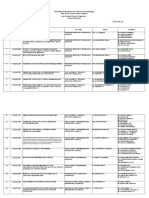
- Karnataka State Council For Science and Technology 44th Student Project Programme Online EvaluationDocument4 pagesKarnataka State Council For Science and Technology 44th Student Project Programme Online EvaluationM. Sadiq. A. PachapuriNo ratings yet
- Department of Mechanical Engineering: Iv SemesterDocument14 pagesDepartment of Mechanical Engineering: Iv SemesterM. Sadiq. A. PachapuriNo ratings yet
- Yoga Day Sap EditDocument6 pagesYoga Day Sap EditM. Sadiq. A. PachapuriNo ratings yet
- Fracture Webinar - June 2020Document1 pageFracture Webinar - June 2020M. Sadiq. A. PachapuriNo ratings yet
- Webinar 6th June - Design and ManufactureDocument3 pagesWebinar 6th June - Design and ManufactureM. Sadiq. A. PachapuriNo ratings yet
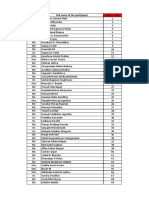
- Unique Code For All Registered ParticipantsDocument17 pagesUnique Code For All Registered ParticipantsM. Sadiq. A. PachapuriNo ratings yet
- FDP Recent Trends in Mechatronics & Automation Brochure 23.06.20Document2 pagesFDP Recent Trends in Mechatronics & Automation Brochure 23.06.20M. Sadiq. A. PachapuriNo ratings yet
- Comparison of Multiple Regression and Radial Basis PDFDocument8 pagesComparison of Multiple Regression and Radial Basis PDFM. Sadiq. A. PachapuriNo ratings yet
- Cryogenics: Simon Amoedo, Edouard Thebaud, Michael Gschwendtner, David WhiteDocument9 pagesCryogenics: Simon Amoedo, Edouard Thebaud, Michael Gschwendtner, David WhiteM. Sadiq. A. PachapuriNo ratings yet
- Pile DesignDocument13 pagesPile DesignMohafisto SofistoNo ratings yet
- Nonlinear Cyclic Truss Model For Reinforced Concrete WallsDocument10 pagesNonlinear Cyclic Truss Model For Reinforced Concrete WallsNicolas OspinaNo ratings yet
- Marathon 1 - Permutations and CombinationsDocument119 pagesMarathon 1 - Permutations and CombinationskeshavNo ratings yet
- Laboratory 12 - SMPSDocument3 pagesLaboratory 12 - SMPSAriana Ribeiro LameirinhasNo ratings yet
- Cal Poly Pomona Course CatalogDocument64 pagesCal Poly Pomona Course CatalogchandatanmanNo ratings yet
- Technical Memorandum: Hexagonal Close Packed (Document16 pagesTechnical Memorandum: Hexagonal Close Packed (Müge YılmazNo ratings yet
- Ec302 ADocument2 pagesEc302 AJazir HameedNo ratings yet
- To Demonstrate Bernoulli's Theorem: Group MembersDocument7 pagesTo Demonstrate Bernoulli's Theorem: Group MembersMansoob BukhariNo ratings yet
- Final MathDocument5 pagesFinal MathBrendan Lewis DelgadoNo ratings yet
- Lecture12 BJT Transistor CircuitsDocument14 pagesLecture12 BJT Transistor CircuitsKartika MunirNo ratings yet
- Wormhole: Topological SpacetimeDocument14 pagesWormhole: Topological SpacetimeHimanshu GiriNo ratings yet
- Algebraic Coding Theory PDFDocument210 pagesAlgebraic Coding Theory PDFAryaman TiwariNo ratings yet
- Module 5 (Traversing and Travers Computation)Document21 pagesModule 5 (Traversing and Travers Computation)Marvie NivalNo ratings yet
- Department of ComputingDocument5 pagesDepartment of Computingfigeket745No ratings yet
- An Introduction To Linear Algebra: Andreas Jakobsson Lund UniversityDocument33 pagesAn Introduction To Linear Algebra: Andreas Jakobsson Lund UniversityHonorius FendiNo ratings yet
- Dynamic Selection Screen Generation For SAP SolutionsDocument13 pagesDynamic Selection Screen Generation For SAP SolutionsAbhijeet GuptaNo ratings yet
- 3D Electric Calculation For A Station Class ZnO Surge Arrester For 1100kVDocument1 page3D Electric Calculation For A Station Class ZnO Surge Arrester For 1100kVadriasiq3068No ratings yet
- Chapter 6: Thermodynamics: $ 1: TemperatureDocument25 pagesChapter 6: Thermodynamics: $ 1: TemperatureMuhammad RehanNo ratings yet
- Everyday Math Reps Handout For Online ResourcesDocument2 pagesEveryday Math Reps Handout For Online Resourcesapi-214354559No ratings yet
- Sample Format of Meeting Minutes ExampleDocument3 pagesSample Format of Meeting Minutes ExamplePaolo O. LozadaNo ratings yet
- Materials: Science - Laboratory Instructions - Laboratory: Crime Scene SketchDocument4 pagesMaterials: Science - Laboratory Instructions - Laboratory: Crime Scene SketchboopNo ratings yet
- Mem SCH Eng OU 18-1-1Document31 pagesMem SCH Eng OU 18-1-1kotaNo ratings yet
- Fin33 2nd NewDocument2 pagesFin33 2nd NewRonieOlarteNo ratings yet
- Internship ReportDocument37 pagesInternship ReportRaju SyedNo ratings yet
- Dip Question BankDocument38 pagesDip Question BankSanthosh PaNo ratings yet