You might also like
- Vezérlések TervezéseDocument23 pagesVezérlések TervezéseLászló GyöreNo ratings yet
- Zalotay Peter PLC AlapokDocument29 pagesZalotay Peter PLC AlapokAlex DavidNo ratings yet
- OopDocument55 pagesOopKatona imreNo ratings yet
- Villanyszerelés PDFDocument31 pagesVillanyszerelés PDFTóth Dorottya100% (2)
- AlgoritmusokDocument71 pagesAlgoritmusokfeherl2No ratings yet
- 7 - Tetel - Teljesitmenyteszt - Segedlet - v1.3Document20 pages7 - Tetel - Teljesitmenyteszt - Segedlet - v1.3Zoltán VargaNo ratings yet
- 11es Tétel Algoritmus Leíró EszközökDocument13 pages11es Tétel Algoritmus Leíró EszközökAlexandra MiklósNo ratings yet
- Az Algoritmusokkal Szemben Támasztott KövetelményekDocument6 pagesAz Algoritmusokkal Szemben Támasztott KövetelményekDaniNo ratings yet
- Sensitivity Analysis On Input Parameters or DistributionsDocument15 pagesSensitivity Analysis On Input Parameters or Distributionsszacsi72No ratings yet
- l11 PLCDocument18 pagesl11 PLCBalázs HorváthNo ratings yet
- Aszinkron Es Szinkron Motoros HajtasokDocument52 pagesAszinkron Es Szinkron Motoros HajtasokKaloz VagyokNo ratings yet
- NJ Automatika VDocument162 pagesNJ Automatika VCintia SzalaiNo ratings yet
- Az Ipari Ethernet, Mint Valós Idejű RendszerDocument15 pagesAz Ipari Ethernet, Mint Valós Idejű Rendszerpapp.szialrd3No ratings yet
- Programozható Irányítóberendezesek, Hálózatok És RendszerekDocument368 pagesProgramozható Irányítóberendezesek, Hálózatok És RendszerekGábor FeketeNo ratings yet
- 01 - Bevezetés HfelolvasniDocument14 pages01 - Bevezetés Hfelolvasnibamer.ilona.22.dNo ratings yet
- Üzemfenntartás 3Document46 pagesÜzemfenntartás 3Gábor FeketeNo ratings yet
- Szabályozástechnika AlapokDocument16 pagesSzabályozástechnika AlapokMatte Dee JayNo ratings yet
- Két Szabadságfokú Rendszer SzimulációjaDocument45 pagesKét Szabadságfokú Rendszer Szimulációjakelemen.csongor63No ratings yet
- Algoritmizalas LektoralatlanDocument114 pagesAlgoritmizalas LektoralatlankulcstarNo ratings yet
- Éfm KidolgozottDocument26 pagesÉfm KidolgozottAnett JuhászNo ratings yet
- 9.mikrovezérlők IDocument17 pages9.mikrovezérlők IGábor FeketeNo ratings yet
- Gépjármű ElektronikaDocument90 pagesGépjármű ElektronikaZalan Marton100% (1)
- FolyamatmodellezésDocument32 pagesFolyamatmodellezésSzimonetta PécsiNo ratings yet
- Irányítástechnika AlapjaiDocument97 pagesIrányítástechnika AlapjaiGábor FeketeNo ratings yet
- Programozható Irányítóberendezések Hálózatok És RendszerekDocument368 pagesProgramozható Irányítóberendezések Hálózatok És Rendszerekmarci48No ratings yet
- Információk Gyűjtése, Energiaellátás Meghatározása, PLC KiválasztásaDocument38 pagesInformációk Gyűjtése, Energiaellátás Meghatározása, PLC KiválasztásaEszter RuzicskaNo ratings yet
- INF3Document38 pagesINF3Kálmán MarosicsNo ratings yet
- M6 Elmélet HUDocument14 pagesM6 Elmélet HUdrdexter55No ratings yet
- Iranyitastechnika JegyzetDocument67 pagesIranyitastechnika JegyzetDzsoki JúingNo ratings yet
- Bev MechatronikabaDocument204 pagesBev MechatronikabaBrandon Erickson100% (3)
- A PLC Felépítése, Működése És JellemzőiDocument3 pagesA PLC Felépítése, Működése És JellemzőiZoltán VargaNo ratings yet
- GDF Tételek 2009 Műszaki Informatika B SorDocument59 pagesGDF Tételek 2009 Műszaki Informatika B SorSzuLaNo ratings yet
- Üzemfenntartás 2Document27 pagesÜzemfenntartás 2Gábor FeketeNo ratings yet
- Puska Az ERP Kivalasztashoz EbookDocument31 pagesPuska Az ERP Kivalasztashoz EbookErnőné SaskőiNo ratings yet
- L15 TajekoztatoDocument4 pagesL15 TajekoztatoTóth IstvánNo ratings yet
- 3 SzintekDocument51 pages3 SzinteksarokpontNo ratings yet
- Tétel 2Document5 pagesTétel 2Kriszti Szepesi100% (1)
- T3 UtmutatoDocument20 pagesT3 UtmutatoQwe QweNo ratings yet
- NEW NJE Opsys 07 Schedule ContextDocument46 pagesNEW NJE Opsys 07 Schedule ContextLorem IpsumNo ratings yet
- Iranyitastechnika IDocument96 pagesIranyitastechnika Ikissoliver077No ratings yet
- A SPIKE Prime LEGO Készlet KézikönyvDocument33 pagesA SPIKE Prime LEGO Készlet KézikönyvOravecznéTorják AnitaNo ratings yet
- A TételekDocument24 pagesA TételekSzandra Zákány100% (1)
- zv1Document16 pageszv1susmusNo ratings yet
- PLC AlapokDocument3 pagesPLC AlapokVarga ZoltánNo ratings yet
- 01 - A Controlling Tevékenység Általános ÁttekintéseDocument5 pages01 - A Controlling Tevékenység Általános ÁttekintéseJuhász MártaNo ratings yet
- PLC Jegyzet 01Document3 pagesPLC Jegyzet 01marci48No ratings yet
- Adatbázis És Szoftverfejlesztés ElméletDocument26 pagesAdatbázis És Szoftverfejlesztés ElméletErica Gy VargaNo ratings yet
- Tétel 1Document6 pagesTétel 1Kriszti Szepesi100% (1)
- 8 ProgramozásDocument22 pages8 ProgramozásZoltán DobosNo ratings yet
- Laborgyakorlat. Step7 Programozási Környezet BemutatásaDocument9 pagesLaborgyakorlat. Step7 Programozási Környezet Bemutatásajozsef.kovacs.ncxNo ratings yet
- 2142 Automatika Laboratórium PéldatárDocument167 pages2142 Automatika Laboratórium PéldatárGyula RostásNo ratings yet
- Edu12 2 Koszár A PLC Tanulmány 2016Document28 pagesEdu12 2 Koszár A PLC Tanulmány 2016Koszár AndrásNo ratings yet
- MR 341 Laguna 0Document17 pagesMR 341 Laguna 0József BusaNo ratings yet
- RezgesvizsgalatDocument14 pagesRezgesvizsgalatFábián FerencNo ratings yet
- A japán keresztények egyélelmű megközelítése: A gyertyatartó kereskedés és a technikai elemzés leghatékonyabb stratégiáinak bevezető útmutatójaFrom EverandA japán keresztények egyélelmű megközelítése: A gyertyatartó kereskedés és a technikai elemzés leghatékonyabb stratégiáinak bevezető útmutatójaNo ratings yet
- A pénzügyi piacok technikai elemzésének egyszerű megközelítése: Hogyan készítsünk és értelmezzünk technikai elemzési grafikonokat az online kereskedési tevékenység javítása érdekébenFrom EverandA pénzügyi piacok technikai elemzésének egyszerű megközelítése: Hogyan készítsünk és értelmezzünk technikai elemzési grafikonokat az online kereskedési tevékenység javítása érdekébenNo ratings yet
- SWOT ELEMZÉS 4 LÉPÉSBEN: Hogyan használd a SWOT-mátrixot a karrier és az üzleti életbenFrom EverandSWOT ELEMZÉS 4 LÉPÉSBEN: Hogyan használd a SWOT-mátrixot a karrier és az üzleti életbenNo ratings yet
- Egyszerű megközelítés a SEO-hoz: Hogyan érthetjük meg a keresőmotor-optimalizálás alapjait egyszerű és gyakorlatias módon, egy mindenki számára elérhető, nem szakmabeli felfedezőútvonalon keresztülFrom EverandEgyszerű megközelítés a SEO-hoz: Hogyan érthetjük meg a keresőmotor-optimalizálás alapjait egyszerű és gyakorlatias módon, egy mindenki számára elérhető, nem szakmabeli felfedezőútvonalon keresztülNo ratings yet
- Efec IiiDocument214 pagesEfec IiiGábor FeketeNo ratings yet
- Efec ViiDocument96 pagesEfec ViiGábor FeketeNo ratings yet
- Kormányberendezés Fejezet: TartalomjegyzékDocument22 pagesKormányberendezés Fejezet: TartalomjegyzékGábor FeketeNo ratings yet
- Em IiiDocument57 pagesEm IiiGábor FeketeNo ratings yet
- Efec XiDocument49 pagesEfec XiGábor FeketeNo ratings yet
- I. Melléklet: TartalomjegyzékDocument7 pagesI. Melléklet: TartalomjegyzékGábor FeketeNo ratings yet
- Üzemfenntartás 3Document46 pagesÜzemfenntartás 3Gábor FeketeNo ratings yet
- Reformkor (Kossuth És Szécheny Vitája)Document1 pageReformkor (Kossuth És Szécheny Vitája)Gábor FeketeNo ratings yet
- Trianoni BékeszerződésDocument1 pageTrianoni BékeszerződésGábor FeketeNo ratings yet
- Efec IxDocument105 pagesEfec IxGábor FeketeNo ratings yet
- El IxDocument198 pagesEl IxGábor FeketeNo ratings yet
- Mérés 3Document42 pagesMérés 3Gábor FeketeNo ratings yet
- Újkori OlimpiákDocument6 pagesÚjkori OlimpiákGábor FeketeNo ratings yet
- Esztergált Munkadarabok MéréseDocument47 pagesEsztergált Munkadarabok MéréseGábor FeketeNo ratings yet
- Mérés 1Document72 pagesMérés 1Gábor FeketeNo ratings yet
- Diagram Homogén TerületeitDocument6 pagesDiagram Homogén TerületeitGábor FeketeNo ratings yet
- Robottechnika 2Document51 pagesRobottechnika 2Gábor FeketeNo ratings yet
- Fémmikroszkópos VizsgálatDocument21 pagesFémmikroszkópos VizsgálatGábor FeketeNo ratings yet
- RobotokDocument15 pagesRobotokGábor FeketeNo ratings yet
- Villamos ÉrintésvédelemDocument23 pagesVillamos ÉrintésvédelemGábor FeketeNo ratings yet
- Villamos Biztonságtechnika 2015Document77 pagesVillamos Biztonságtechnika 2015Gábor FeketeNo ratings yet
- Villamos Berendezések FelülvizsgálataDocument5 pagesVillamos Berendezések FelülvizsgálataGábor FeketeNo ratings yet
- AnyagmozgatásDocument8 pagesAnyagmozgatásGábor FeketeNo ratings yet
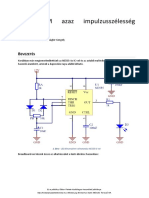
- PWM Azaz Impulzusszélesség Moduláció: EvezetésDocument11 pagesPWM Azaz Impulzusszélesség Moduláció: EvezetésGábor FeketeNo ratings yet
- Irányítástechnika AlapjaiDocument97 pagesIrányítástechnika AlapjaiGábor FeketeNo ratings yet
- Irányítástechnikai RendszerekDocument32 pagesIrányítástechnikai RendszerekGábor FeketeNo ratings yet
- Programozható Irányítóberendezesek, Hálózatok És RendszerekDocument368 pagesProgramozható Irányítóberendezesek, Hálózatok És RendszerekGábor FeketeNo ratings yet
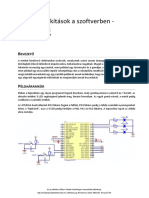
- 21.megszakítások A Szoftverben - InterruptokDocument13 pages21.megszakítások A Szoftverben - InterruptokGábor FeketeNo ratings yet