You might also like
- 01 Measurement Method2Document53 pages01 Measurement Method2Chairoh IraNo ratings yet
- Bme (Ee) 605a-Topic-1Document37 pagesBme (Ee) 605a-Topic-1Souvik DasNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Module 1 Part 1 MergedDocument146 pagesModule 1 Part 1 MergedSankaranarayanan ANo ratings yet
- EE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićDocument22 pagesEE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićFrank WhiteNo ratings yet
- 01 Basic Concept in Measurement SystemDocument95 pages01 Basic Concept in Measurement SystemWong Kai YiNo ratings yet
- Introduction To Measurement and Instrumentation SystemDocument38 pagesIntroduction To Measurement and Instrumentation SystemFaizal AbdullahNo ratings yet
- Instrumentation and Measurements: Fall Semster 2019Document19 pagesInstrumentation and Measurements: Fall Semster 2019khizar abbasNo ratings yet
- Chapter 1 Basic Concepts of Measurement MethodsDocument18 pagesChapter 1 Basic Concepts of Measurement MethodsDiyaa AhmedNo ratings yet
- Generalized Configurations and Functional Descriptions of Measuring InstrumentsDocument31 pagesGeneralized Configurations and Functional Descriptions of Measuring InstrumentsNishanthi BheemanNo ratings yet
- Chapter 1 Error MesurementDocument99 pagesChapter 1 Error MesurementMuhammad SyahmiNo ratings yet
- CH 01 (Measurement Systems)Document31 pagesCH 01 (Measurement Systems)Abdullah Ahnaf MahdyNo ratings yet
- Unit 1 Mechanical Measurement & MetrologyDocument34 pagesUnit 1 Mechanical Measurement & Metrologybhuyanuttam7No ratings yet
- Measurement Course MateialDocument56 pagesMeasurement Course Mateialkalaivani1408No ratings yet
- Intrumentation - Introduction To Measurement SystemDocument31 pagesIntrumentation - Introduction To Measurement Systemoladokunsulaiman100% (3)
- Chapter 1 January2021Document33 pagesChapter 1 January2021Airish AirishNo ratings yet
- Process Instrumentation Basic DefinitionsDocument49 pagesProcess Instrumentation Basic DefinitionsMantuomNo ratings yet
- Unit-1 EMI 7-9-21Document24 pagesUnit-1 EMI 7-9-21Shivam Kumar YadavNo ratings yet
- 1b Static & Dynamic Characteristics&Loading Effect PDFDocument45 pages1b Static & Dynamic Characteristics&Loading Effect PDFvishnuNo ratings yet
- Lecture 2&3: Measurement and Functional Elements of InstrumentsDocument34 pagesLecture 2&3: Measurement and Functional Elements of InstrumentsMoiz Khan YousufzaiNo ratings yet
- Process Control & InstrumentationDocument49 pagesProcess Control & InstrumentationMantuomNo ratings yet
- Instrumentation EnglishDocument49 pagesInstrumentation EnglishSara N'driNo ratings yet
- Chapter 2. Sensors and ActuatorsDocument58 pagesChapter 2. Sensors and ActuatorsTesfaye Olana100% (1)
- Mechanical Measurements and Metrology: Unit 1: Introduction To MeasurementsDocument24 pagesMechanical Measurements and Metrology: Unit 1: Introduction To MeasurementsYASH RAYUDU 16131A03N4No ratings yet
- L1 - Intro To MeasuremenmDocument35 pagesL1 - Intro To MeasuremenmcapNo ratings yet
- Lec 2Document22 pagesLec 2mgeneralworkNo ratings yet
- ME6702 NotesDocument62 pagesME6702 NotesKanda SamyNo ratings yet
- Chapter 1: InterferenceDocument2 pagesChapter 1: InterferenceCalen McLeanNo ratings yet
- MeasurementDocument21 pagesMeasurementyogesh.20222066No ratings yet
- Chapter 1 - Introduction To InstrumentationDocument31 pagesChapter 1 - Introduction To InstrumentationANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Lec1.0 - Introduction To Instrumentation & Its ApplicationsDocument54 pagesLec1.0 - Introduction To Instrumentation & Its ApplicationsMuhammad Naufal RamzNo ratings yet
- Basic Inst. Control Concept. by Mr. Thanawat 18-Nov-10Document66 pagesBasic Inst. Control Concept. by Mr. Thanawat 18-Nov-10Duong NguyenNo ratings yet
- Chapter 1-Webster Basic Concepts of Medical InstrumentationDocument46 pagesChapter 1-Webster Basic Concepts of Medical InstrumentationGama Kristian AdikurniaNo ratings yet
- PMS Lab ManualDocument35 pagesPMS Lab ManualBMD DBMNo ratings yet
- Topic 2-Mesurands and Transducers (14-02-2014)Document63 pagesTopic 2-Mesurands and Transducers (14-02-2014)Fer Martinez de la RivaNo ratings yet
- Introduction To Sensors: Edited From: Sookram SobhanDocument52 pagesIntroduction To Sensors: Edited From: Sookram SobhanJongin KimNo ratings yet
- 1.1 Introduction To Intrumentatio and Control EngineeringDocument64 pages1.1 Introduction To Intrumentatio and Control EngineeringZenobia Joy VillarbaNo ratings yet
- Electrical Parameter Measuring Unit Symbol DescriptionDocument3 pagesElectrical Parameter Measuring Unit Symbol Descriptionbee loggerNo ratings yet
- InstrumentationDocument27 pagesInstrumentationHusnain ArshadNo ratings yet
- Chapter 1 Error Mesurement PDFDocument99 pagesChapter 1 Error Mesurement PDFanesseNo ratings yet
- Lecture 2 2022Document56 pagesLecture 2 2022abdallaNo ratings yet
- Bio Instrum Intro1Document13 pagesBio Instrum Intro1CALEB DAVID ROMERO MERCADONo ratings yet
- Chapter 1 NotesDocument11 pagesChapter 1 NotesSouvik DasNo ratings yet
- Instrumentation For Process Automation: 1.2.1 Static PerformanceDocument38 pagesInstrumentation For Process Automation: 1.2.1 Static PerformanceSumit RijalNo ratings yet
- Instrumentation For StudentsDocument157 pagesInstrumentation For StudentsBalasubramanyaNo ratings yet
- Lecture #1 (Measurement Systems)Document56 pagesLecture #1 (Measurement Systems)inabalqisNo ratings yet
- Lec (1) - Measurement System Calibration and Errors - 2Document16 pagesLec (1) - Measurement System Calibration and Errors - 2Nawaf Al-TamimiNo ratings yet
- Unit 1 Introduction To Instrumentation-Part 1Document62 pagesUnit 1 Introduction To Instrumentation-Part 1Akshat RawatNo ratings yet
- EC-305: Electronic Measurement and InstrumentationDocument147 pagesEC-305: Electronic Measurement and InstrumentationAakash SonowalNo ratings yet
- Sensor Dynamic Static CharacteristicsDocument6 pagesSensor Dynamic Static CharacteristicsMantuomNo ratings yet
- Lec - 2 InstrumentDocument31 pagesLec - 2 Instrumentefrem atsbahaNo ratings yet
- Mec400 Instrumentation and Control Systems: Slide No: 1Document22 pagesMec400 Instrumentation and Control Systems: Slide No: 1Aayush PatidarNo ratings yet
- Industrial Instrumentation: Process MeasurementDocument54 pagesIndustrial Instrumentation: Process MeasurementmedobasNo ratings yet
- Introduction To Various Instruments:: List of Some Electronic InstrumentsDocument12 pagesIntroduction To Various Instruments:: List of Some Electronic Instrumentssonuchary0% (1)
- TransducersDocument36 pagesTransducersAnurag JoshiNo ratings yet
- Topic:: Application of Machine Learning and Types of LearningDocument27 pagesTopic:: Application of Machine Learning and Types of LearningnagabushanamNo ratings yet
- L7 L 8 - Areas Volume-IDocument19 pagesL7 L 8 - Areas Volume-InagabushanamNo ratings yet
- L5 L6 - Conditional ProbabilityDocument22 pagesL5 L6 - Conditional ProbabilitynagabushanamNo ratings yet
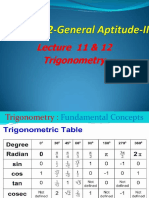
- TrigonometryDocument21 pagesTrigonometrynagabushanamNo ratings yet
- EEC 129 TheoryDocument55 pagesEEC 129 TheoryVietHungCao100% (6)
- PHOTOVOLTAICSDocument27 pagesPHOTOVOLTAICSbrian otienoNo ratings yet
- 1 2 2 Ak AnalogdigitalsignalDocument6 pages1 2 2 Ak Analogdigitalsignalapi-290804719No ratings yet
- Technical Manual: Night Vision Equipment Data SheetsDocument33 pagesTechnical Manual: Night Vision Equipment Data SheetsVoltaireZeroNo ratings yet
- Mud Density in Out SensorDocument2 pagesMud Density in Out SensorShaukat khanNo ratings yet
- Hydrostatic SensorDocument11 pagesHydrostatic SensorASTERIXNo ratings yet
- Presentation On WattDocument12 pagesPresentation On WattShambhukumar JhaNo ratings yet
- Chapter 1 - Electricity and MagnetismDocument41 pagesChapter 1 - Electricity and MagnetismDarwin Lajato TipdasNo ratings yet
- E+H Promass E100 PDFDocument80 pagesE+H Promass E100 PDFpercecvNo ratings yet
- E4G6Document6 pagesE4G6Liecell CabalesNo ratings yet
- (Eugenio Culurciello) Silicon-On-Sapphire CircuitsDocument413 pages(Eugenio Culurciello) Silicon-On-Sapphire Circuitsnguyen xuan vietNo ratings yet
- Cacat Yang Umum Terdapat Pada PipaDocument10 pagesCacat Yang Umum Terdapat Pada PipaAntrasit CoffeeNo ratings yet
- F5C7 Quantum Note 2Document4 pagesF5C7 Quantum Note 2YashwinieNo ratings yet
- Experiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveDocument2 pagesExperiment No. 1: DIFFERENT TYPES OF Uninterruptible Power Supply (UPS) Systems ObjectiveMichael Calizo PacisNo ratings yet
- Digital-To-Analog Converter - Wikipedia, The Free EncyclopediaDocument8 pagesDigital-To-Analog Converter - Wikipedia, The Free EncyclopediaAnilkumar KubasadNo ratings yet
- TVC Alxiirs Datasheetv4.3Document2 pagesTVC Alxiirs Datasheetv4.3bayuNo ratings yet
- EmtDocument115 pagesEmtRaj SharmaNo ratings yet
- Short Form CatalogueDocument41 pagesShort Form CatalogueCharlie KebasoNo ratings yet
- Template G9 Scientific Investigation of Fruit BatteryDocument2 pagesTemplate G9 Scientific Investigation of Fruit Batteryelliexx0720No ratings yet
- SAES T 000 Telecommunicton STNDRDDocument10 pagesSAES T 000 Telecommunicton STNDRDphilipyap100% (3)
- I/O Problems Got You Down?: Customer NeedDocument2 pagesI/O Problems Got You Down?: Customer NeedJuan Esteban Benjumea BenjumeaNo ratings yet
- 3WT Accessories: SENTRON Automatic Transfer Controller ATC5300Document1 page3WT Accessories: SENTRON Automatic Transfer Controller ATC5300ersanjeeb_456No ratings yet
- Installation, Operation and Maintenance Manual FOR De-Watering PumpDocument18 pagesInstallation, Operation and Maintenance Manual FOR De-Watering PumpsatfasNo ratings yet
- CET Power - Y-ONE REG Datasheet - v1.2Document2 pagesCET Power - Y-ONE REG Datasheet - v1.2Jorge TuaNo ratings yet
- Product Specifications: D B X L H - 6565B-VtmDocument4 pagesProduct Specifications: D B X L H - 6565B-VtmTC Cemal GüntürkünNo ratings yet
- La 25-pDocument3 pagesLa 25-pqais652002No ratings yet
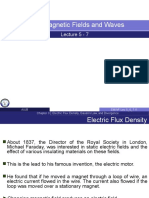
- Electromagnetic Fields and Waves: Lecture 5 - 7Document41 pagesElectromagnetic Fields and Waves: Lecture 5 - 7Nabil AbdullahNo ratings yet
- LCOE Calculator 1Document44 pagesLCOE Calculator 1Jorge Isaac Flores SamaniegoNo ratings yet
- Schneider Electric LRD3363 DatasheetDocument2 pagesSchneider Electric LRD3363 DatasheetfreescalerNo ratings yet
- I T5 A LVN: Street Light Fittings With Lower CoverDocument1 pageI T5 A LVN: Street Light Fittings With Lower Coverionelg834549No ratings yet