You might also like
- T-Ecet210lec HW4 SumayaDocument2 pagesT-Ecet210lec HW4 SumayaMigsNo ratings yet
- MMC 2019 Grade 7 Division Finals - Team Oral Competition Questions With SolutionsDocument33 pagesMMC 2019 Grade 7 Division Finals - Team Oral Competition Questions With SolutionsNoreenNo ratings yet
- Folmula SheetDocument6 pagesFolmula SheetMariam MahmoudNo ratings yet
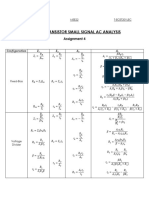
- SDMF Formula RevisedDocument1 pageSDMF Formula RevisedG MdNo ratings yet
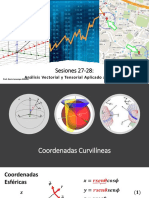
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- 1819 Formula Sheet 1 (Chemical Equilibria) (EN)Document2 pages1819 Formula Sheet 1 (Chemical Equilibria) (EN)Nathasha MncubeNo ratings yet
- Formulario MTBF Calcular La Probabilidad de Falla Estadística Por: . + .Document3 pagesFormulario MTBF Calcular La Probabilidad de Falla Estadística Por: . + .Eduardo Torres PinoNo ratings yet
- Hoja de Fórmulas para El ParcialDocument1 pageHoja de Fórmulas para El ParcialSabrina Celeste ImpróvolaNo ratings yet
- Lecture No 19Document7 pagesLecture No 19GGCTTS BooksNo ratings yet
- 𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αDocument4 pages𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αdrissboum1bacNo ratings yet
- Grade 12 Mathematics: Advanced StreamDocument28 pagesGrade 12 Mathematics: Advanced Streammanal alsaadiNo ratings yet
- Ángulos NotablesDocument2 pagesÁngulos NotablesSALOMON LOPEZ APAZANo ratings yet
- Equation SheetDocument2 pagesEquation SheetStevenNo ratings yet
- 2 4 Solving Equations With Variables On Both Sides Maze ActivityDocument1 page2 4 Solving Equations With Variables On Both Sides Maze ActivityDulce CastroNo ratings yet
- CalculusDocument16 pagesCalculusapi-662361166No ratings yet
- Basic MathematicsDocument16 pagesBasic MathematicsGeethika SriNo ratings yet
- Ravi Sir 7.2-FDocument7 pagesRavi Sir 7.2-FQUANTUMLING BUDDHANo ratings yet
- Board Questions - ContinuityDocument9 pagesBoard Questions - Continuityadityaaaaaa002No ratings yet
- Formulario de Funciones MatematicasDocument2 pagesFormulario de Funciones MatematicasJUAN SALVADOR LARA CAMACHONo ratings yet
- Independiente Marginal ( ) Corr : Coef de Corr Entre - 1 y 1Document1 pageIndependiente Marginal ( ) Corr : Coef de Corr Entre - 1 y 1williamNo ratings yet
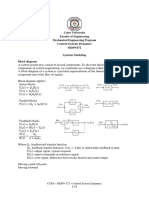
- Steady State ErrorDocument4 pagesSteady State ErrorAhmed KhaledNo ratings yet
- Formulario N 1 (Algebra)Document1 pageFormulario N 1 (Algebra)Moises Mamani BarcoNo ratings yet
- Formulario para ImprimirDocument3 pagesFormulario para Imprimirramirezmariadelrosario340No ratings yet
- Formulario para ImprimirDocument3 pagesFormulario para Imprimirramirezmariadelrosario340No ratings yet
- Formula ColoredDocument1 pageFormula ColoredKrisha TenegraNo ratings yet
- ElectronicsDocument57 pagesElectronicsYashodha SNo ratings yet
- Taller de Taylor y Maclaurin 511Document15 pagesTaller de Taylor y Maclaurin 511Esteban RcNo ratings yet
- 2 2 Solving Two Step Equations Maze ActivityDocument1 page2 2 Solving Two Step Equations Maze ActivityKarina Atayupanqui C.No ratings yet
- 1st Grading Lesson 5 - GR 9Document9 pages1st Grading Lesson 5 - GR 9justanotherbroadwayfanNo ratings yet
- HE Lecture 5 PDFDocument13 pagesHE Lecture 5 PDFpresidentisc nit-rourkelaNo ratings yet
- STAT273 - CHAPTER 04 (Summer)Document30 pagesSTAT273 - CHAPTER 04 (Summer)Abood RainNo ratings yet
- Practical Research 2 Quantitative Research: Inferential Statistics Reference of Formulas Hypothesis-Testing ProcessDocument4 pagesPractical Research 2 Quantitative Research: Inferential Statistics Reference of Formulas Hypothesis-Testing Processjessa barbosaNo ratings yet
- Clase 4 - Mate IV - Ecuaciones Lineales PDFDocument17 pagesClase 4 - Mate IV - Ecuaciones Lineales PDFJhoann Andres Torres CocaNo ratings yet
- شيت القوانينDocument2 pagesشيت القوانينRuqaya MohammedNo ratings yet
- Reglas Básicas de Derivación e IntegraciónDocument2 pagesReglas Básicas de Derivación e Integraciónduvan petrohernandezNo ratings yet
- Neraca KomponenDocument2 pagesNeraca KomponenSelvy SalfitriNo ratings yet
- Neraca KomponenDocument2 pagesNeraca KomponenSelvy SalfitriNo ratings yet
- Tabla Procesos TermodinámicosDocument1 pageTabla Procesos TermodinámicosDiana FloresNo ratings yet
- Financial Ratio & Formulas: Activity RatiosDocument6 pagesFinancial Ratio & Formulas: Activity RatioswesamNo ratings yet
- SPP Positioning With PseudorangesDocument2 pagesSPP Positioning With PseudorangesFelix JaimesNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument10 pagesHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- Electric Flux Density, Gauss Law, Divergence PDFDocument35 pagesElectric Flux Density, Gauss Law, Divergence PDFSubhan MansoorNo ratings yet
- Past Paper Items On Measures of Central Locationa and VariationDocument13 pagesPast Paper Items On Measures of Central Locationa and VariationFelicio DelibertoNo ratings yet
- PH4Document4 pagesPH4za3iman12No ratings yet
- Lecture 3Document5 pagesLecture 3akhbar elyoum academyNo ratings yet
- IntegralDocument3 pagesIntegraldanielaNo ratings yet
- 55 Caa 95 SyeDocument2 pages55 Caa 95 SyeAnonymous wrsmp5hEWNo ratings yet
- Correc Exe1Document1 pageCorrec Exe1SOUFIANE BOURCHIHNo ratings yet
- Studying Production and Trade Through An Input-Output Analysis FrameworkDocument2 pagesStudying Production and Trade Through An Input-Output Analysis FrameworkNina Dela CruzNo ratings yet
- Hoja de Fórmulas para El Parcial TMDocument1 pageHoja de Fórmulas para El Parcial TMSabrina Celeste ImpróvolaNo ratings yet
- Formulario de Fisica Sergio Martínez Ramírez: Parametro Impacto Seccion Transversal Fracción PartículasDocument1 pageFormulario de Fisica Sergio Martínez Ramírez: Parametro Impacto Seccion Transversal Fracción PartículasCitlalli ZentenoNo ratings yet
- Steps in Strap FootingDocument1 pageSteps in Strap FootingDae NyghtNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- Clase 11 - Mat IV - Transformada de LaplaceDocument9 pagesClase 11 - Mat IV - Transformada de LaplaceYAN ELIO MANRIQUE MOGOLLONNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument1 pageHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- List of EquationsDocument8 pagesList of EquationsxadoogarNo ratings yet
- Clase 4 - Mate IV - Ecuaciones LinealesDocument17 pagesClase 4 - Mate IV - Ecuaciones LinealesPæül AlarconNo ratings yet
- Lesson 1 and 2 - Solving Quadratic Equations by Extracting Square Roots and FactoringDocument21 pagesLesson 1 and 2 - Solving Quadratic Equations by Extracting Square Roots and FactoringRosalyn CalapitcheNo ratings yet
- A Guide to Microsoft Excel 2007 for Scientists and EngineersFrom EverandA Guide to Microsoft Excel 2007 for Scientists and EngineersRating: 5 out of 5 stars5/5 (1)
- Matrix Multiplication: Jackie Nicholas Mathematics Learning Centre University of SydneyDocument16 pagesMatrix Multiplication: Jackie Nicholas Mathematics Learning Centre University of SydneyROMMEL DORINNo ratings yet
- Matrix Multiplication Algorithms With Better Time ComplexityDocument9 pagesMatrix Multiplication Algorithms With Better Time ComplexityTrọng Chuẩn NguyễnNo ratings yet
- SCALAR Product Worksheet (1) HHHHHHHHHHDocument2 pagesSCALAR Product Worksheet (1) HHHHHHHHHHSameh AllaouiNo ratings yet
- (Draft) Revised Syllabus FOR M. Sc. (Mathematics)Document33 pages(Draft) Revised Syllabus FOR M. Sc. (Mathematics)maNo ratings yet
- Area of Parallelogram in Vector Form FormulaDocument10 pagesArea of Parallelogram in Vector Form FormulaAnanthi DNo ratings yet
- Phys 481 Homework 1 SolutionsDocument6 pagesPhys 481 Homework 1 SolutionsJeffSchuelerNo ratings yet
- Class Note Simplex MethodDocument6 pagesClass Note Simplex MethodBijay NagNo ratings yet
- Engineering Mechanics: StaticsDocument31 pagesEngineering Mechanics: Statics재인디디No ratings yet
- Physics 1 - LESSON 1 (Mid - Fall 24)Document15 pagesPhysics 1 - LESSON 1 (Mid - Fall 24)Shoaib AhmedNo ratings yet
- Advances in Principal Component Analysis Research and Development - Ganesh R. NaikDocument256 pagesAdvances in Principal Component Analysis Research and Development - Ganesh R. NaikJhon Guerrero SalinasNo ratings yet
- Electrical and Computer EngineeringDocument381 pagesElectrical and Computer EngineeringZoin XtNo ratings yet
- School of Mathematics and Statistics MT3501 Linear Mathematics Problem Sheet I: Vector SpacesDocument15 pagesSchool of Mathematics and Statistics MT3501 Linear Mathematics Problem Sheet I: Vector Spacesvinicius kardecNo ratings yet
- x' = xcosθ − ysinθ y' = xsinθ + ycosθ: RotationDocument3 pagesx' = xcosθ − ysinθ y' = xsinθ + ycosθ: RotationMuhammad IzaanNo ratings yet
- قسم الإنشاءاتDocument44 pagesقسم الإنشاءاتmohamed ahmedNo ratings yet
- Mathematics TOAE105 SyllabusDocument5 pagesMathematics TOAE105 SyllabusManh PhanNo ratings yet
- Bimodule - WikipediaDocument3 pagesBimodule - WikipediaBoneChenNo ratings yet
- Assignment-1 TOE: Pratiksha R Rodewad 5th Semester Aerospace Engineering IIST, Thiruvanthapuram March 28, 2021Document7 pagesAssignment-1 TOE: Pratiksha R Rodewad 5th Semester Aerospace Engineering IIST, Thiruvanthapuram March 28, 2021pratiksha rodewadNo ratings yet
- Semester I: Discipline: Electronics and Communication Stream: EC3Document99 pagesSemester I: Discipline: Electronics and Communication Stream: EC3Jerrin Thomas PanachakelNo ratings yet
- Optimal and Robust ControlDocument216 pagesOptimal and Robust ControlCh BarriosNo ratings yet
- Hestenes (GA1) 2002 - Reforming The Mathematical Language of PhysicsDocument43 pagesHestenes (GA1) 2002 - Reforming The Mathematical Language of PhysicsvanesppNo ratings yet
- Advanced Topics in Linear Algebra Weaving Matrix Problems Through The Weyr FormDocument423 pagesAdvanced Topics in Linear Algebra Weaving Matrix Problems Through The Weyr FormSDFSDJKFJKNNo ratings yet
- Page Rank PDFDocument20 pagesPage Rank PDFShruti BansalNo ratings yet
- Hand-Waving and Interpretive Dance: An Introductory Course On Tensor Networks Lecture NotesDocument62 pagesHand-Waving and Interpretive Dance: An Introductory Course On Tensor Networks Lecture NotesToon PillaertNo ratings yet
- Notes 05 Coordinates Dirac DeltaDocument11 pagesNotes 05 Coordinates Dirac DeltaPratikGujarathiNo ratings yet
- Analysis of Structural Member SystemsDocument620 pagesAnalysis of Structural Member Systemskhiettrth100% (2)
- Vectors Worksheet #01, Shape & Space Revision From GCSE Maths TutorDocument2 pagesVectors Worksheet #01, Shape & Space Revision From GCSE Maths TutorgcsemathstutorNo ratings yet
- Eigenfaces Face Recognition (MATLAB)Document5 pagesEigenfaces Face Recognition (MATLAB)Naveen PanthamNo ratings yet
- Uitm Mat523 Feb2022 FinalDocument18 pagesUitm Mat523 Feb2022 FinalNUR NISA HUMAIRA NAZLINo ratings yet
- 2.6 Matrices: Matrix EqualityDocument4 pages2.6 Matrices: Matrix Equalityالزهور لخدمات الانترنيتNo ratings yet
- 50 Questions On Linear Algebra For NET and GATE Aspirants - Gonit Sora ( ' )Document9 pages50 Questions On Linear Algebra For NET and GATE Aspirants - Gonit Sora ( ' )Venkat Reddy YedullaNo ratings yet