You might also like
- How WebKit WorksDocument16 pagesHow WebKit WorkschesterpetersNo ratings yet
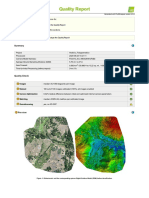
- Quality Report: Generated With Pix4Denterprise Version 4.4.12Document9 pagesQuality Report: Generated With Pix4Denterprise Version 4.4.12jaretd martinezNo ratings yet
- Proyecto Lima Practica - ReportDocument8 pagesProyecto Lima Practica - ReportJJorge Pacheco LauraNo ratings yet
- Projekt 2 1 Be DH 9 ReportDocument7 pagesProjekt 2 1 Be DH 9 ReportvbirrNo ratings yet
- GAMORURO TUTO ReportDocument6 pagesGAMORURO TUTO ReportSanty NorNo ratings yet
- LOS CARASKM16 - ReportDocument8 pagesLOS CARASKM16 - ReportStalin CoralNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document8 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Fernanda HerediaNo ratings yet
- Informe de Calidad Lev DronDocument9 pagesInforme de Calidad Lev DronAdrian Vasquez BerrezuetaNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailseduardoNo ratings yet
- Ilovepdf MergedDocument62 pagesIlovepdf MergedMaria Alejandra VivancoNo ratings yet
- Rs Tambopata ReportDocument7 pagesRs Tambopata ReportGMBRUMELNo ratings yet
- Serranopolis Do Iguacu ReportDocument8 pagesSerranopolis Do Iguacu ReportDouglas MarquesNo ratings yet
- Cholchol ReportDocument9 pagesCholchol ReportdiazsaezNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document11 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Alex Jaime Chaurra DiazNo ratings yet
- Project 2024 02 29T00 - 43 - 38.049Z - ReportDocument10 pagesProject 2024 02 29T00 - 43 - 38.049Z - ReportYordi Baca HerreraNo ratings yet
- TANGANA ReportDocument9 pagesTANGANA ReportFrank Morales TomyNo ratings yet
- Kit GD Phantom4 PPK ReportDocument8 pagesKit GD Phantom4 PPK ReportmarksNo ratings yet
- Procesamiento Casa - ReportDocument9 pagesProcesamiento Casa - ReportPepe casoNo ratings yet
- PARTMEDIA ReportDocument12 pagesPARTMEDIA ReportStalin CoralNo ratings yet
- 02.05. Reporte de CalidadDocument9 pages02.05. Reporte de Calidadjacqueline roxana cadillo giraldoNo ratings yet
- SOLANO ReportDocument7 pagesSOLANO ReportStalin CoralNo ratings yet
- Quiality - Report - Proyecto-01Document10 pagesQuiality - Report - Proyecto-01carlos alradoado calderonNo ratings yet
- Quality Report: Calibration DetailsDocument10 pagesQuality Report: Calibration DetailsjesNo ratings yet
- PUENTE IBARRA - ReportDocument9 pagesPUENTE IBARRA - ReportStalin CoralNo ratings yet
- Relevamiento Drone - Project-2021-01-18 - ReportDocument9 pagesRelevamiento Drone - Project-2021-01-18 - ReportarieldariomartinNo ratings yet
- SANJACINTO3D ReportDocument8 pagesSANJACINTO3D ReportStalin CoralNo ratings yet
- Mappa Demonstrativo Report PDFDocument10 pagesMappa Demonstrativo Report PDFMarcos PerliNo ratings yet
- Reporte OrtomosaicoDocument8 pagesReporte OrtomosaicoArdila YezidNo ratings yet
- Quality Report: Calibration DetailsDocument11 pagesQuality Report: Calibration DetailsVinicius PaulinoNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsGeosan LtdaNo ratings yet
- Reporte HuanucDocument15 pagesReporte HuanucLalex Torres TorresNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsfaridNo ratings yet
- Informe Pix4D PresaHooverDocument27 pagesInforme Pix4D PresaHooverJERIIKINNo ratings yet
- RUBAYA ReportDocument5 pagesRUBAYA ReportChristophe MadihanoNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsIsmael CoulibalyNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsAlmubaraq Ratomi PrasadNo ratings yet
- Processing Report: ImagesDocument7 pagesProcessing Report: Imagesk0zminNo ratings yet
- Informe Tarea 3Document10 pagesInforme Tarea 3Miguel angel BarreroNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsGeodrones LimaNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration Detailskana ngalamNo ratings yet
- Tambo de Mora - ReportDocument12 pagesTambo de Mora - ReportAlberto Chávez AngelesNo ratings yet
- Sinohidroo Report 1Document12 pagesSinohidroo Report 1Wilfredo TejerinaNo ratings yet
- Coba Report UavDocument8 pagesCoba Report UavSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Drone ReportDocument6 pagesDrone Reporthanif0404No ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsKélibiano FirasNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsdanb1No ratings yet
- Experimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationDocument5 pagesExperimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationRafael RodriguezNo ratings yet
- ODM Quality Report: Dataset SummaryDocument6 pagesODM Quality Report: Dataset SummaryPAVEL RAMON CASTILLA HUAMANNo ratings yet
- Benq PE7700 20070110 133842 SpecificationsDocument28 pagesBenq PE7700 20070110 133842 SpecificationsconyakNo ratings yet
- (Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexDocument5 pages(Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexMuhamad LuqmanNo ratings yet
- Fundamental Steps in Digital Image ProcessingDocument26 pagesFundamental Steps in Digital Image Processingboose kutty dNo ratings yet
- Cedar Hill Cross Road 10 7 2023 ReportDocument5 pagesCedar Hill Cross Road 10 7 2023 ReportFelipe GrossiNo ratings yet
- CQS D4-400Document9 pagesCQS D4-400B Sukma SyarifudinNo ratings yet
- Adaptive Median FilteringDocument12 pagesAdaptive Median FilteringNaveena Sherin100% (1)
- Digital Image Definitions&TransformationsDocument18 pagesDigital Image Definitions&TransformationsAnand SithanNo ratings yet
- DSP TermpaperDocument6 pagesDSP Termpaperਗੁਰਪਰੀਤ ਸਿੰਘ ਸੂਰਾਪੁਰੀNo ratings yet
- Implementing Security Using Iris Recognition Using MatlabDocument10 pagesImplementing Security Using Iris Recognition Using MatlabDeepak Kumar100% (1)
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESFrom EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNo ratings yet
- Quality Report: Generated With Pix4Denterprise Version 4.4.12Document9 pagesQuality Report: Generated With Pix4Denterprise Version 4.4.12jaretd martinezNo ratings yet
- Perfil Longitudinal 1+000.00 - 2+000.00 Escala: H 1:1000 V 1:200Document1 pagePerfil Longitudinal 1+000.00 - 2+000.00 Escala: H 1:1000 V 1:200jaretd martinezNo ratings yet
- Volume Report: Client: Prepared byDocument48 pagesVolume Report: Client: Prepared byjaretd martinezNo ratings yet
- Vol 00+000@10+000 23072021Document11 pagesVol 00+000@10+000 23072021jaretd martinezNo ratings yet
- Perfil Longitudinal 3+000.00 - 4+000.00 Escala: H 1:2000 V 1:400Document1 pagePerfil Longitudinal 3+000.00 - 4+000.00 Escala: H 1:2000 V 1:400jaretd martinezNo ratings yet
- Perfil Longitudinal 5+000.00 - 6+000.00 Escala: H 1:2000 V 1:400Document1 pagePerfil Longitudinal 5+000.00 - 6+000.00 Escala: H 1:2000 V 1:400jaretd martinezNo ratings yet
- Ansaldo Energia PDFDocument15 pagesAnsaldo Energia PDFTripti GuptaNo ratings yet
- GOEL, Vinod and PIROLLI, Peter. The Structure of Design Problem SpacesDocument35 pagesGOEL, Vinod and PIROLLI, Peter. The Structure of Design Problem SpacesLuis ValeroNo ratings yet
- Genset Maintain Time TableDocument2 pagesGenset Maintain Time TableRasheed SiddiquiNo ratings yet
- Application Report XRD 11 D2 PHASER Quantitative Phase Analysis of Gypsum DOC-R88-EXS011 HighDocument2 pagesApplication Report XRD 11 D2 PHASER Quantitative Phase Analysis of Gypsum DOC-R88-EXS011 HighAnonymous FW5PVUpNo ratings yet
- CS3491 ARTIFICIAL INTELLIGENCE AND MACHINE LEARNING 01 - by WWW - LearnEngineering.inDocument23 pagesCS3491 ARTIFICIAL INTELLIGENCE AND MACHINE LEARNING 01 - by WWW - LearnEngineering.inSaravanan SujathaNo ratings yet
- Mri Devices Corporation: Technical ReportDocument6 pagesMri Devices Corporation: Technical ReportRogerio CastroNo ratings yet
- Pumps and Pumping SystemsDocument88 pagesPumps and Pumping SystemssrathinakumarNo ratings yet
- 1 - Training PDS Interface - Generate PCD and PDS RDB FilesDocument25 pages1 - Training PDS Interface - Generate PCD and PDS RDB Filesno1139No ratings yet
- Roth Air ReadmeDocument2 pagesRoth Air ReadmetiagocoNo ratings yet
- Suzuki OBM PropellersDocument4 pagesSuzuki OBM PropellersRomie HarieNo ratings yet
- AutoMax-80 LIS ManualDocument54 pagesAutoMax-80 LIS ManualdaisuphaduNo ratings yet
- RSIDocument4 pagesRSIAlejandro BrandizziNo ratings yet
- UT Dallas Syllabus For Math1314.501.10f Taught by Brady McCary (bcm052000)Document6 pagesUT Dallas Syllabus For Math1314.501.10f Taught by Brady McCary (bcm052000)UT Dallas Provost's Technology GroupNo ratings yet
- CAFCO 300 HS Short Form - Sept 2016Document2 pagesCAFCO 300 HS Short Form - Sept 2016Salman ShaikhNo ratings yet
- PageSpeed Insights PagesDocument9 pagesPageSpeed Insights PagesprabhatbhusanNo ratings yet
- Temperature Measurement From The Brain and Rectum in Charred CorpsesDocument4 pagesTemperature Measurement From The Brain and Rectum in Charred Corpsesaria rizky utamiNo ratings yet
- ProbabilityDocument1 pageProbabilitySSJ7No ratings yet
- Subnetting Questions 2Document11 pagesSubnetting Questions 2smzohaibabbasNo ratings yet
- EcosDocument16 pagesEcosGuruprasad ChoukimathNo ratings yet
- Ata2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVDocument8 pagesAta2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVNguyễn Trung ThôngNo ratings yet
- Mikrotik - Firewall - FailoverDocument2 pagesMikrotik - Firewall - Failovermauro lipisNo ratings yet
- Kathrein 80010665Document2 pagesKathrein 80010665klamar5100% (1)
- Sulsim Script FinalDocument10 pagesSulsim Script FinalMuhammad NaeemNo ratings yet
- Transformation - 2DDocument93 pagesTransformation - 2DKashika MehtaNo ratings yet
- H3C S5120-EI - Datasheet DWL 20.07.2010lDocument7 pagesH3C S5120-EI - Datasheet DWL 20.07.2010lflatexyNo ratings yet
- Soil CompactionDocument6 pagesSoil CompactionJems MansuetoNo ratings yet
- Majister.2005 KH - Imarazene90Document6 pagesMajister.2005 KH - Imarazene90Asm MaNo ratings yet
- Characterizing Of The Natural Product Goldenseal Using Cortecs 2.7 Μm Columns And Acquity Qda DetectionDocument10 pagesCharacterizing Of The Natural Product Goldenseal Using Cortecs 2.7 Μm Columns And Acquity Qda DetectionAnne Sophie ArcigaNo ratings yet