You might also like
- Color Guide For Graphic DesignersDocument226 pagesColor Guide For Graphic DesignersSajithking Fisher88% (33)
- Artcam Sculpting MasterclassDocument16 pagesArtcam Sculpting MasterclassPradeepkumar Kp67% (3)
- GE Options CatalogueDocument102 pagesGE Options CatalogueManal FeghaliNo ratings yet
- The Tutorial of Laser Engraving Software ManualDocument65 pagesThe Tutorial of Laser Engraving Software ManualLuis GuzmanNo ratings yet
- Introduction To Perspective ProjectionDocument21 pagesIntroduction To Perspective ProjectionJyothi ManikNo ratings yet
- Comprehensive QBDocument107 pagesComprehensive QB979Niya NoushadNo ratings yet
- Integrating Images and External Materials in Word ProcessorsDocument6 pagesIntegrating Images and External Materials in Word Processorsha hakdog100% (1)
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsIsmael CoulibalyNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsGeodrones LimaNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration Detailskana ngalamNo ratings yet
- Processing Report: ImagesDocument7 pagesProcessing Report: Imagesk0zminNo ratings yet
- Drone ReportDocument6 pagesDrone Reporthanif0404No ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsKélibiano FirasNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsAlmubaraq Ratomi PrasadNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsfaridNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsjaretd martinezNo ratings yet
- LOS CARASKM16 - ReportDocument8 pagesLOS CARASKM16 - ReportStalin CoralNo ratings yet
- Informe de Calidad Lev DronDocument9 pagesInforme de Calidad Lev DronAdrian Vasquez BerrezuetaNo ratings yet
- Serranopolis Do Iguacu ReportDocument8 pagesSerranopolis Do Iguacu ReportDouglas MarquesNo ratings yet
- GAMORURO TUTO ReportDocument6 pagesGAMORURO TUTO ReportSanty NorNo ratings yet
- Proyecto Lima Practica - ReportDocument8 pagesProyecto Lima Practica - ReportJJorge Pacheco LauraNo ratings yet
- Ilovepdf MergedDocument62 pagesIlovepdf MergedMaria Alejandra VivancoNo ratings yet
- Cholchol ReportDocument9 pagesCholchol ReportdiazsaezNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document11 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Alex Jaime Chaurra DiazNo ratings yet
- Quality Report: Generated With Pix4Denterprise Version 4.4.12Document9 pagesQuality Report: Generated With Pix4Denterprise Version 4.4.12jaretd martinezNo ratings yet
- Kit GD Phantom4 PPK ReportDocument8 pagesKit GD Phantom4 PPK ReportmarksNo ratings yet
- Mappa Demonstrativo Report PDFDocument10 pagesMappa Demonstrativo Report PDFMarcos PerliNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailseduardoNo ratings yet
- TANGANA ReportDocument9 pagesTANGANA ReportFrank Morales TomyNo ratings yet
- Project 2024 02 29T00 - 43 - 38.049Z - ReportDocument10 pagesProject 2024 02 29T00 - 43 - 38.049Z - ReportYordi Baca HerreraNo ratings yet
- Tambo de Mora - ReportDocument12 pagesTambo de Mora - ReportAlberto Chávez AngelesNo ratings yet
- Rs Tambopata ReportDocument7 pagesRs Tambopata ReportGMBRUMELNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document8 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Fernanda HerediaNo ratings yet
- Reporte OrtomosaicoDocument8 pagesReporte OrtomosaicoArdila YezidNo ratings yet
- SANJACINTO3D ReportDocument8 pagesSANJACINTO3D ReportStalin CoralNo ratings yet
- Quality Report: Calibration DetailsDocument10 pagesQuality Report: Calibration DetailsjesNo ratings yet
- Projekt 2 1 Be DH 9 ReportDocument7 pagesProjekt 2 1 Be DH 9 ReportvbirrNo ratings yet
- PUENTE IBARRA - ReportDocument9 pagesPUENTE IBARRA - ReportStalin CoralNo ratings yet
- 02.05. Reporte de CalidadDocument9 pages02.05. Reporte de Calidadjacqueline roxana cadillo giraldoNo ratings yet
- SOLANO ReportDocument7 pagesSOLANO ReportStalin CoralNo ratings yet
- Procesamiento Casa - ReportDocument9 pagesProcesamiento Casa - ReportPepe casoNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsGeosan LtdaNo ratings yet
- Quiality - Report - Proyecto-01Document10 pagesQuiality - Report - Proyecto-01carlos alradoado calderonNo ratings yet
- Informe Pix4D PresaHooverDocument27 pagesInforme Pix4D PresaHooverJERIIKINNo ratings yet
- PARTMEDIA ReportDocument12 pagesPARTMEDIA ReportStalin CoralNo ratings yet
- Informe Tarea 3Document10 pagesInforme Tarea 3Miguel angel BarreroNo ratings yet
- Quality Report: Calibration DetailsDocument11 pagesQuality Report: Calibration DetailsVinicius PaulinoNo ratings yet
- Reporte HuanucDocument15 pagesReporte HuanucLalex Torres TorresNo ratings yet
- Sinohidroo Report 1Document12 pagesSinohidroo Report 1Wilfredo TejerinaNo ratings yet
- DIP Part2Document30 pagesDIP Part2zaitunaNo ratings yet
- Experimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationDocument5 pagesExperimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationRafael RodriguezNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsdanb1No ratings yet
- (1.) Basics & ApplicationsDocument30 pages(1.) Basics & Applicationsnithin sri sarveswarNo ratings yet
- Fundamentals of Digital Radiology: George David Medical College of GeorgiaDocument86 pagesFundamentals of Digital Radiology: George David Medical College of Georgiasari_wiendiartantiNo ratings yet
- ODM Quality Report: Dataset SummaryDocument6 pagesODM Quality Report: Dataset SummaryPAVEL RAMON CASTILLA HUAMANNo ratings yet
- Trial BingaDocument5 pagesTrial Bingaishwar joshiNo ratings yet
- GXP - TechnicalPaper - 2021-11 - Deducing High Resolution Satellite ImagesDocument15 pagesGXP - TechnicalPaper - 2021-11 - Deducing High Resolution Satellite ImagesIRMA RIVERANo ratings yet
- FALLSEM2022-23 CSE4019 ETH VL2022230104728 2022-08-03 Reference-Material-IDocument72 pagesFALLSEM2022-23 CSE4019 ETH VL2022230104728 2022-08-03 Reference-Material-ISRISHTI ACHARYYA 20BCE2561No ratings yet
- Chapter 2 - Basic Techniques in Image ProcessingDocument90 pagesChapter 2 - Basic Techniques in Image ProcessingVo ToanNo ratings yet
- RAMA DRDocument44 pagesRAMA DRramadurai123No ratings yet
- B. Ramasubramanian Dr.S.Kaja Mohideen: Presented by Guided byDocument56 pagesB. Ramasubramanian Dr.S.Kaja Mohideen: Presented by Guided byramadurai123No ratings yet
- Lecture 1 Machine Vision 1 2022Document78 pagesLecture 1 Machine Vision 1 2022SamNo ratings yet
- CH 3Document20 pagesCH 3Arebu MarufNo ratings yet
- Cross Dataset Sensor Alignment Making Visual 3D Object Detector GeneralizeDocument8 pagesCross Dataset Sensor Alignment Making Visual 3D Object Detector Generalizemasoud kiaNo ratings yet
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESFrom EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNo ratings yet
- Kemajuan Tambang SWL PT SiDocument2 pagesKemajuan Tambang SWL PT SiSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Sustainability 14 08163 v2Document30 pagesSustainability 14 08163 v2Patricio Castillo INo ratings yet
- QweqweDocument8 pagesQweqweSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Tamka Kemajuan PT Si WLDocument5 pagesTamka Kemajuan PT Si WLSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Fool's Gold: Understanding Social, Economic and Environmental Impacts From Gold Mining in Quang Nam Province, VietnamDocument22 pagesFool's Gold: Understanding Social, Economic and Environmental Impacts From Gold Mining in Quang Nam Province, VietnamSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- RFGHTDocument12 pagesRFGHTSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Sni SumberayaDocument2 pagesSni SumberayaSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- KemenerusanDocument2 pagesKemenerusanSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- 5 MinescapeDocument2 pages5 MinescapeSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Actividad 3 Images Computer Vision - Ipynb - ColaboratoryDocument8 pagesActividad 3 Images Computer Vision - Ipynb - ColaboratoryAna VelezNo ratings yet
- Computer Graphics HW#2 (Fall 2019) : Name, ID, Section: Instructor Name: DR Osama Halabi Due - GradeDocument3 pagesComputer Graphics HW#2 (Fall 2019) : Name, ID, Section: Instructor Name: DR Osama Halabi Due - GradeRhadamés CarmonaNo ratings yet
- lastUIException 63802229501Document6 pageslastUIException 63802229501Natalia MarinNo ratings yet
- Febe1002a Engineering Drawing Assignment - 2024Document5 pagesFebe1002a Engineering Drawing Assignment - 2024mjmogau772No ratings yet
- T11 - Image-Processing-FundamentalsDocument90 pagesT11 - Image-Processing-Fundamentalsmoney_kandan2004No ratings yet
- LLISP Low-Light Image Signal Processing Net Via Two-Stage NetworkDocument10 pagesLLISP Low-Light Image Signal Processing Net Via Two-Stage Networkrinsha. febnNo ratings yet
- What The Hell Is Hardware T&LDocument10 pagesWhat The Hell Is Hardware T&LSubhodeep SadhukhanNo ratings yet
- OsiriXUserManualExtract PDFDocument25 pagesOsiriXUserManualExtract PDFEdwar Andreiv Polanco BeltranNo ratings yet
- CREDITSDocument14 pagesCREDITSSzórádi GergőNo ratings yet
- Mam Azmat PaperDocument6 pagesMam Azmat PaperAimen MajidNo ratings yet
- Second Periodical Test in MAPEH 6 MusicDocument7 pagesSecond Periodical Test in MAPEH 6 MusicLiliancudieraNo ratings yet
- Lab10 Image Segmentation1Document14 pagesLab10 Image Segmentation1Manoj ReddyNo ratings yet
- Trainees Record BookDocument7 pagesTrainees Record BookNyn Tadeo de Guzman100% (1)
- Image Segmentation in Digital Image ProcessingDocument71 pagesImage Segmentation in Digital Image ProcessingSATYAM GUPTANo ratings yet
- Introduction To R2V and A 30-Minute Tutorial: 1.0 Installation GuideDocument82 pagesIntroduction To R2V and A 30-Minute Tutorial: 1.0 Installation GuideDEEPAK KUMAR MALLICKNo ratings yet
- Introduction: Boundary Fill Algorithm Starts at A Pixel Inside The Polygon To BeDocument6 pagesIntroduction: Boundary Fill Algorithm Starts at A Pixel Inside The Polygon To BepratapmukherjeeNo ratings yet
- Texturizando Com Substance PainterDocument26 pagesTexturizando Com Substance PainterMarcos Germano DegenhardtNo ratings yet
- Mesyuarat Pengurusan Kokum Bil 1 2023Document55 pagesMesyuarat Pengurusan Kokum Bil 1 2023WarnidahJefreyNo ratings yet
- Understanding EDID - Extended Display Identification Data PDFDocument5 pagesUnderstanding EDID - Extended Display Identification Data PDFMurat GörükmezNo ratings yet
- How To .: Create Noise EffectDocument4 pagesHow To .: Create Noise EffectMan KuehNo ratings yet
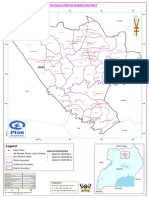
- Health Facilities in Pader District: LegendDocument4 pagesHealth Facilities in Pader District: LegendAloysious OpiyoNo ratings yet
- Slab 6Document7 pagesSlab 6Brebulet AlinNo ratings yet
- A A A A M M M M: NDY NDY NDY NDY Uehlhausen Uehlhausen Uehlhausen UehlhausenDocument1 pageA A A A M M M M: NDY NDY NDY NDY Uehlhausen Uehlhausen Uehlhausen UehlhausenxxsharkyNo ratings yet