You might also like
- HW02 - Linear Operators RE00Document1 pageHW02 - Linear Operators RE00mahdi najafzadehNo ratings yet
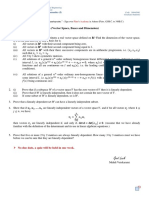
- HW01 - Vector Space, Bases and Dimension RE00Document1 pageHW01 - Vector Space, Bases and Dimension RE00mahdi najafzadehNo ratings yet
- Numerical Analysis Module 2 Fundamentals of Vector SpacesDocument33 pagesNumerical Analysis Module 2 Fundamentals of Vector Spacespartha4uNo ratings yet
- Computer Geometries For Finding All Real Zeros of PolynomialDocument17 pagesComputer Geometries For Finding All Real Zeros of PolynomialnailaNo ratings yet
- Assignment 3 Summer2020Document1 pageAssignment 3 Summer2020irfanNo ratings yet
- MTMHCC4 - MTMH - Ii Semester - MTM - 26072022 - 0907 - 250720220654Document2 pagesMTMHCC4 - MTMH - Ii Semester - MTM - 26072022 - 0907 - 250720220654SouvikNo ratings yet
- Electro Magnetic Field Theory NotesDocument149 pagesElectro Magnetic Field Theory NotesactuatorNo ratings yet
- Bsc-III MathsDocument11 pagesBsc-III Mathskaranspawar007No ratings yet
- Tutorial1 ch5350Document2 pagesTutorial1 ch5350kc79797No ratings yet
- Am1 Ex4Document3 pagesAm1 Ex4CH YNo ratings yet
- Department of Physics: Federal Urdu University of Arts, Science and Technology, KarachiDocument3 pagesDepartment of Physics: Federal Urdu University of Arts, Science and Technology, KarachiHashir SaeedNo ratings yet
- Linear Transformation - ExerciseDocument14 pagesLinear Transformation - Exercisepallugowda2129No ratings yet
- Review Homework #1 - v2Document2 pagesReview Homework #1 - v2cw031001No ratings yet
- Solution Alternative of Complex Fuzzy Linear Equation SystemDocument6 pagesSolution Alternative of Complex Fuzzy Linear Equation SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Extended Rayleigh-Ritz Method For An Analysis of Nonlinear VibrationsDocument7 pagesThe Extended Rayleigh-Ritz Method For An Analysis of Nonlinear VibrationsGuilherme NagaeNo ratings yet
- رياضياتDocument15 pagesرياضياتem2200139No ratings yet
- Lect 28Document78 pagesLect 28Shahina OmarNo ratings yet
- Linear Algebra Primer ConceptsDocument50 pagesLinear Algebra Primer Conceptsmayur bargeNo ratings yet
- COL 726 Assignment 1: 15 February - 1 March, 2020Document2 pagesCOL 726 Assignment 1: 15 February - 1 March, 2020lolNo ratings yet
- MathDocument205 pagesMathamine menadNo ratings yet
- PDF PPT Mathematical Physics Tensor Unit 7Document43 pagesPDF PPT Mathematical Physics Tensor Unit 7Pratip JanaNo ratings yet
- Candidates Are Required To Give Their Answers in Their Own Words As Far As PracticableDocument6 pagesCandidates Are Required To Give Their Answers in Their Own Words As Far As PracticableBishal ShahiNo ratings yet
- Lectures On Dynamic Systems and Control MITDocument320 pagesLectures On Dynamic Systems and Control MITNoa Noa ReyNo ratings yet
- Linear Equations and MatricesDocument30 pagesLinear Equations and MatricesArnab GergasiNo ratings yet
- Eds Institute: Pair of Linear Equations in Two VariablesDocument3 pagesEds Institute: Pair of Linear Equations in Two VariablesAshwin JambhulkarNo ratings yet
- Tut Comp-IiiDocument6 pagesTut Comp-Iiivmarathe1505No ratings yet
- CE531 Lecture 1 - 2020 - v1 PDFDocument12 pagesCE531 Lecture 1 - 2020 - v1 PDFPablo123No ratings yet
- Fixed Point Theorems, Multi-Valued Contractive Mappings and Multi-Valuedcaristi Type MappingsDocument9 pagesFixed Point Theorems, Multi-Valued Contractive Mappings and Multi-Valuedcaristi Type MappingsSharad Kumar BarveNo ratings yet
- Exam - Structural RegularDocument2 pagesExam - Structural RegularUpdirahman MohamoudNo ratings yet
- Ma214 S23 Part06Document30 pagesMa214 S23 Part06Vishal PuriNo ratings yet
- Chapter 3. Radial Basis Function NetworksDocument24 pagesChapter 3. Radial Basis Function NetworksRakhesh R NairNo ratings yet
- 1 s2.0 S0950705124000613 MainDocument16 pages1 s2.0 S0950705124000613 MainZhang WeiNo ratings yet
- Sheet 2Document2 pagesSheet 2Hassan MolhamNo ratings yet
- A Numerical Approach For Solving Nonlinear Boundary Value Problems in Finite Domain Using Spline Collocation MethodDocument4 pagesA Numerical Approach For Solving Nonlinear Boundary Value Problems in Finite Domain Using Spline Collocation MethodIJIRSTNo ratings yet
- Chapter 6 Vectors: 1 Learning OutcomesDocument20 pagesChapter 6 Vectors: 1 Learning OutcomesElizabeth SantiagoNo ratings yet
- Muhammad Umer Farooq 21020920-007.........Document8 pagesMuhammad Umer Farooq 21020920-007.........umer farooqNo ratings yet
- 276-Article Text-826-1-10-20230322Document10 pages276-Article Text-826-1-10-20230322shiksmenNo ratings yet
- Group 10 Math M.umer Farooq 007Document37 pagesGroup 10 Math M.umer Farooq 007umer farooqNo ratings yet
- Am1 Ex3Document3 pagesAm1 Ex3CH YNo ratings yet
- Pure Math Formula PDFDocument22 pagesPure Math Formula PDFSavith RajakarunaNo ratings yet
- An Investigation On Support Vector Clustering For Big Data in Quantum ParadigmDocument14 pagesAn Investigation On Support Vector Clustering For Big Data in Quantum ParadigmAshish ManiNo ratings yet
- FYCS DM Stats Sample QuestionsDocument6 pagesFYCS DM Stats Sample QuestionsAfza MukaddamNo ratings yet
- Tensors: NPTEL - Physics - Mathematical Physics - 1Document3 pagesTensors: NPTEL - Physics - Mathematical Physics - 1Sushanta Kumar RoyNo ratings yet
- On The Sum of Left and Right Circulant Ma 2023 Linear Algebra and Its ApplicDocument24 pagesOn The Sum of Left and Right Circulant Ma 2023 Linear Algebra and Its ApplicSasikalaNo ratings yet
- Calculus 3 TextDocument207 pagesCalculus 3 TextAhmadMoaazNo ratings yet
- Monte CarloDocument13 pagesMonte Carlodiananis91No ratings yet
- Chinese Journal of Physics: Moumita Indra, K.K. Ghosh, Saibal RayDocument7 pagesChinese Journal of Physics: Moumita Indra, K.K. Ghosh, Saibal RayMoumita IndraNo ratings yet
- Lecture 4Document5 pagesLecture 4Kaveesha JayasuriyaNo ratings yet
- Theorems On Common Fixed Point of Expansive Mappings in Dislocated Metric SpacesDocument12 pagesTheorems On Common Fixed Point of Expansive Mappings in Dislocated Metric SpacesAnantachai PadcharoenNo ratings yet
- Ep&Nm - Extra - Linear AlgebraDocument62 pagesEp&Nm - Extra - Linear AlgebrakyungmunNo ratings yet
- Complete Book Mechnics PDFDocument111 pagesComplete Book Mechnics PDFKostuv SoniNo ratings yet
- Complete Book MechnicsDocument111 pagesComplete Book MechnicsShahzaib AliNo ratings yet
- 04 Linear Equation in Two Variable Subjective QuestionsDocument5 pages04 Linear Equation in Two Variable Subjective Questionsshweta_angel90No ratings yet
- Tutorial 1Document7 pagesTutorial 1abinNo ratings yet
- Assessment 1 Mat423. Sem Oct22-Feb23Document1 pageAssessment 1 Mat423. Sem Oct22-Feb23Amir AimanNo ratings yet
- A2 1st Sem Exam Review 2011Document5 pagesA2 1st Sem Exam Review 2011klb925No ratings yet
- A&r CBQ Pre-Course MaterilDocument129 pagesA&r CBQ Pre-Course MaterilJeyanthiNo ratings yet
- 8 Lecture Notes 17 Convergence AnalysisDocument36 pages8 Lecture Notes 17 Convergence Analysissatvik mishraNo ratings yet
- International Journal of Hygiene and Environmental HealthDocument4 pagesInternational Journal of Hygiene and Environmental Healthmahdi najafzadehNo ratings yet
- Assignment #8: Advanced Engineering Mathematics II Fall 1400Document3 pagesAssignment #8: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Joosh Fasl1&2Document1 pageJoosh Fasl1&2mahdi najafzadehNo ratings yet
- Assignment #9: Advanced Engineering Mathematics II Fall 1398Document2 pagesAssignment #9: Advanced Engineering Mathematics II Fall 1398mahdi najafzadehNo ratings yet
- Variational Methods in PDEs (Yan, 2008)Document135 pagesVariational Methods in PDEs (Yan, 2008)mahdi najafzadehNo ratings yet
- SolnDocument376 pagesSolnmahdi najafzadehNo ratings yet
- 07 Linear Transformations RE00aDocument10 pages07 Linear Transformations RE00amahdi najafzadehNo ratings yet
- Assignment #9: Advanced Engineering Mathematics II Fall 1400Document2 pagesAssignment #9: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Assignment #5: Advanced Engineering Mathematics II Fall 1400Document4 pagesAssignment #5: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Chapter 8, Problem 10PDocument2 pagesChapter 8, Problem 10Pmahdi najafzadehNo ratings yet
- Assignment #6: Advanced Engineering Mathematics II Fall 1400Document5 pagesAssignment #6: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Assignment #4: Advanced Engineering Mathematics II Fall 1400Document5 pagesAssignment #4: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Assignment #7: Advanced Engineering Mathematics II Fall 1400Document2 pagesAssignment #7: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- Chapter 13, Problem 2PDocument2 pagesChapter 13, Problem 2Pmahdi najafzadehNo ratings yet
- Renewable Energy: Ehsan Mohseni, Waiching TangDocument13 pagesRenewable Energy: Ehsan Mohseni, Waiching Tangmahdi najafzadehNo ratings yet
- Strength and Thermal Conduction Assessment of Lightweight Aromatic Hydrocarbon Waste Polystyrol Glass ConcreteDocument16 pagesStrength and Thermal Conduction Assessment of Lightweight Aromatic Hydrocarbon Waste Polystyrol Glass Concretemahdi najafzadehNo ratings yet
- Assignment #3: Advanced Engineering Mathematics II Fall 1400Document4 pagesAssignment #3: Advanced Engineering Mathematics II Fall 1400mahdi najafzadehNo ratings yet
- 5 AmornpunyapatDocument17 pages5 Amornpunyapatmahdi najafzadehNo ratings yet
- Chapter 13, Problem 1PDocument2 pagesChapter 13, Problem 1Pmahdi najafzadehNo ratings yet
- 4 LeeDocument15 pages4 Leemahdi najafzadehNo ratings yet
- Assessment of Water Quality in Groundwater Resources of Iran Using A Modified Drinking Water Quality Index (DWQI)Document7 pagesAssessment of Water Quality in Groundwater Resources of Iran Using A Modified Drinking Water Quality Index (DWQI)mahdi najafzadehNo ratings yet
- Groundwater For Sustainable Development: Jyotiprakash G. Nayak, L.G. Patil, Vinayak K. PatkiDocument13 pagesGroundwater For Sustainable Development: Jyotiprakash G. Nayak, L.G. Patil, Vinayak K. Patkimahdi najafzadehNo ratings yet
- Abdollahi 2019Document13 pagesAbdollahi 2019mahdi najafzadehNo ratings yet
- Sustainable Construction Using EPS Beads in Light Weight Blocks To Form Innovative Foam Concrete As A Green Building MaterialDocument10 pagesSustainable Construction Using EPS Beads in Light Weight Blocks To Form Innovative Foam Concrete As A Green Building Materialmahdi najafzadehNo ratings yet
- Microbial Risk Analysis: A.B. Boehm, J.A. SollerDocument10 pagesMicrobial Risk Analysis: A.B. Boehm, J.A. Sollermahdi najafzadehNo ratings yet
- Journal of Hydrology: Nahal Maymandi, Reza Kerachian, Mohammad Reza NikooDocument13 pagesJournal of Hydrology: Nahal Maymandi, Reza Kerachian, Mohammad Reza Nikoomahdi najafzadehNo ratings yet
- Foroutan 2019Document12 pagesForoutan 2019mahdi najafzadehNo ratings yet
- Microtopographic Modification Conserves Urban Wetland Water Quality by Increasing The Dissolved Oxygen in The Wet SeasonDocument11 pagesMicrotopographic Modification Conserves Urban Wetland Water Quality by Increasing The Dissolved Oxygen in The Wet Seasonmahdi najafzadehNo ratings yet
- Training Module v5Document100 pagesTraining Module v5Tanjiroholic KimetsuNo ratings yet
- MathematicsDocument1 pageMathematicsJaswanth ChowdarysNo ratings yet
- Maths Class Xii Sample Paper Test 6 For Board Exam 2024Document6 pagesMaths Class Xii Sample Paper Test 6 For Board Exam 2024ydprince111No ratings yet
- HSC Maths Extension 1 Notes PDFDocument5 pagesHSC Maths Extension 1 Notes PDFkevNo ratings yet
- Grade 8 Output EditedDocument30 pagesGrade 8 Output EditedGen-GenAlcantaraBaldadoNo ratings yet
- Reg. No.: Name:: A X B X X XDocument2 pagesReg. No.: Name:: A X B X X XPRANAV GUPTA 20BCE10582No ratings yet
- Intro To SMath Studio 102011Document22 pagesIntro To SMath Studio 102011Aly Jr ArquillanoNo ratings yet
- Assignment 2Document2 pagesAssignment 2Akhlaq HusainNo ratings yet
- On Small Depth Threshold CircuitsDocument14 pagesOn Small Depth Threshold Circuitsvarun raiNo ratings yet
- Best NDA Coaching in LucknowDocument7 pagesBest NDA Coaching in Lucknowlalita haldarNo ratings yet
- Ferroresonance CalculationDocument8 pagesFerroresonance Calculationwildtrek0% (1)
- Lecture Note 1Document32 pagesLecture Note 1Workineh Asmare KassieNo ratings yet
- Mathematics Grade 10Document270 pagesMathematics Grade 10TammanurRaviNo ratings yet
- Prospective Middle School Mathematics Teachers' Knowledge of Linear Graphs in Context of Problem-PosingDocument16 pagesProspective Middle School Mathematics Teachers' Knowledge of Linear Graphs in Context of Problem-PosingLadyj LinaresbNo ratings yet
- Integration of Integrals Involving Quadratic FunctionsDocument12 pagesIntegration of Integrals Involving Quadratic FunctionsNaseeb AliiNo ratings yet
- BASIC CALCULUS MODULE 4th QTRDocument8 pagesBASIC CALCULUS MODULE 4th QTRGiljohn SoberanoNo ratings yet
- Lagrange MultiplierDocument16 pagesLagrange MultiplierwaveletNo ratings yet
- Eoc Math 1 Practice Test QuestionsDocument19 pagesEoc Math 1 Practice Test Questionsapi-235199292No ratings yet
- Midterm Exam SolutionsDocument26 pagesMidterm Exam SolutionsShelaRamos100% (1)
- 4037 s04 QP 1Document8 pages4037 s04 QP 1mstudy123456No ratings yet
- Mathematics Question Bank JEE - MainDocument217 pagesMathematics Question Bank JEE - MainGopal TonyNo ratings yet
- Ch3 II Congruences PDFDocument4 pagesCh3 II Congruences PDFManilyn Suarez0% (1)
- Dupont J. L. - Curvature and Characteristic Classes PDFDocument183 pagesDupont J. L. - Curvature and Characteristic Classes PDFFranklin GálvezNo ratings yet
- Analysis SPM MathsDocument2 pagesAnalysis SPM Mathsoguat_1No ratings yet
- Adding and Subtracting Radical ExpressionsDocument4 pagesAdding and Subtracting Radical ExpressionsJan Dela RosaNo ratings yet
- 20 Rotor and Foundation: E. Krämer, Dynamics of Rotors and Foundations © Springer-Verlag Berlin Heidelberg 1993Document2 pages20 Rotor and Foundation: E. Krämer, Dynamics of Rotors and Foundations © Springer-Verlag Berlin Heidelberg 1993Amirmohamad AzimiNo ratings yet
- New SAT Math WorkbookDocument354 pagesNew SAT Math Workbookvmsgr100% (11)
- Ma 2000 PDFDocument18 pagesMa 2000 PDFMuhammad ZulfiqarNo ratings yet
- Math Let Reviewer 42 Advanced AlgebraDocument3 pagesMath Let Reviewer 42 Advanced Algebrajohn johnNo ratings yet
- Ignou ChapterDocument16 pagesIgnou Chapterabso koNo ratings yet