You might also like
- Finite Element Programming in Non-linear Geomechanics and Transient FlowFrom EverandFinite Element Programming in Non-linear Geomechanics and Transient FlowNo ratings yet
- Piezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringFrom EverandPiezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringNo ratings yet
- Measuring Layer Thicknesses With GPR - Theory To Practice: MaterialsDocument10 pagesMeasuring Layer Thicknesses With GPR - Theory To Practice: MaterialsVidhi VyasNo ratings yet
- Surette PDFDocument21 pagesSurette PDFCarlos JulcaNo ratings yet
- Accuracy of Pavement Thicknesses Estimation Using Different Ground Penetrating Radar Analysis ApproachesDocument11 pagesAccuracy of Pavement Thicknesses Estimation Using Different Ground Penetrating Radar Analysis ApproachesShaik Anwar HussainNo ratings yet
- Innovative Tools For Highway Construction Quality ControlDocument7 pagesInnovative Tools For Highway Construction Quality ControlJotter MineNo ratings yet
- Comparative Modeling of Pavement Surface Texture Variables Using ANN and SPSS SoftwareDocument11 pagesComparative Modeling of Pavement Surface Texture Variables Using ANN and SPSS Softwarezhiyan 55No ratings yet
- Design AptDocument9 pagesDesign Aptsidhyanath pandaNo ratings yet
- Compaction Prediction For Asphalt Mixtures Using Wireless Sensor and Machine Learning AlgorithmsDocument9 pagesCompaction Prediction For Asphalt Mixtures Using Wireless Sensor and Machine Learning AlgorithmsAXONo ratings yet
- Determining Surface Infiltration Rate of Permeable Pavements With Digital ImagingDocument22 pagesDetermining Surface Infiltration Rate of Permeable Pavements With Digital ImagingMd PolashNo ratings yet
- Noureldin Et Al 2003 Network Pavement Evaluation With Falling Weight Deflectometer and Ground Penetrating RadarDocument10 pagesNoureldin Et Al 2003 Network Pavement Evaluation With Falling Weight Deflectometer and Ground Penetrating Radarsaksham dixitNo ratings yet
- Journal 10 PDFDocument6 pagesJournal 10 PDFRuzengulalebih ZEta's-ListikNo ratings yet
- 1 s2.0 S0950061822004901 MainDocument11 pages1 s2.0 S0950061822004901 MainKarolinaNo ratings yet
- Assessment of Texture and Skid Variables at Pavement SurfaceDocument11 pagesAssessment of Texture and Skid Variables at Pavement SurfaceAnmar Al-AdlyNo ratings yet
- Serviceability and Structural Performance of Asphalt Overlays.Document8 pagesServiceability and Structural Performance of Asphalt Overlays.Glenis CastellarNo ratings yet
- WAZNE 1-Schemat PracyDocument14 pagesWAZNE 1-Schemat PracyDarek2No ratings yet
- Cist 009Document103 pagesCist 009Venkatesh ThumatiNo ratings yet
- NDT Methods for Concrete StructuresDocument4 pagesNDT Methods for Concrete StructuresNurAtikahNo ratings yet
- NDT&E International: Zhen Leng, Imad L. Al-Qadi, Samer LahouarDocument7 pagesNDT&E International: Zhen Leng, Imad L. Al-Qadi, Samer Lahouarventurer_2222No ratings yet
- Research: TechnicalDocument2 pagesResearch: TechnicalBasu SurebanNo ratings yet
- Vanderwielen2017 - GPR V Ultrasonic TomographyDocument6 pagesVanderwielen2017 - GPR V Ultrasonic TomographyMS PMNo ratings yet
- Research Article: Evaluation of Rutting Performance of Asphalt Mixture With Driving Wheel Pavement AnalyzerDocument11 pagesResearch Article: Evaluation of Rutting Performance of Asphalt Mixture With Driving Wheel Pavement AnalyzerNasimNo ratings yet
- Tunnelling and Underground Space Technology 95 (2020) 103090Document18 pagesTunnelling and Underground Space Technology 95 (2020) 103090JovanNo ratings yet
- Major ProjectDocument18 pagesMajor ProjectBhumika RaiNo ratings yet
- Applsci 12 09646Document14 pagesApplsci 12 09646sanjayuven97No ratings yet
- Retracted: Identifying Asphalt Pavement Distress Using Uav Lidar Point Cloud Data and Random Forest ClassificationDocument26 pagesRetracted: Identifying Asphalt Pavement Distress Using Uav Lidar Point Cloud Data and Random Forest Classificationbdsimmons2No ratings yet
- V 35119123Document5 pagesV 35119123akash nairNo ratings yet
- Indian Geotech Conference Field & Lab Tests on Low Volume Road SubgradesDocument4 pagesIndian Geotech Conference Field & Lab Tests on Low Volume Road Subgradesfarhan sdNo ratings yet
- 1 s2.0 S0950061818307645 MainDocument15 pages1 s2.0 S0950061818307645 MainZONA LAKINo ratings yet
- Automated Pavement Distress SurveyDocument17 pagesAutomated Pavement Distress SurveyDevela AvinashNo ratings yet
- V35119123 PDFDocument5 pagesV35119123 PDFaiplNo ratings yet
- Surface Texture Measurement On Local Roads TRL PPR148Document89 pagesSurface Texture Measurement On Local Roads TRL PPR148luchassNo ratings yet
- Effect of Surface Texture Variation On Skid Resistance of Asphalt PavementDocument13 pagesEffect of Surface Texture Variation On Skid Resistance of Asphalt PavementAshadi PwNo ratings yet
- Reveiw Pavt AnalysisDocument11 pagesReveiw Pavt AnalysisSeid AbduNo ratings yet
- Vertical DrainDocument15 pagesVertical DrainSyahbani EkaNo ratings yet
- Safety of Wet Asphalt PavementsDocument15 pagesSafety of Wet Asphalt PavementsAlqupa Rinrin AllquparinrinNo ratings yet
- Article 1Document8 pagesArticle 1Cloyd ArtozaNo ratings yet
- Remote SensingDocument23 pagesRemote SensingAdella SyaviraNo ratings yet
- Analysis of Flexible Pavements Using IIT Pave: Harish G RDocument4 pagesAnalysis of Flexible Pavements Using IIT Pave: Harish G RArchan ChakrabortyNo ratings yet
- Analysis of Flexible Pavements Using IIT Pave: Harish G RDocument4 pagesAnalysis of Flexible Pavements Using IIT Pave: Harish G RAyush KumarNo ratings yet
- A Simplified Pavement Condition Index RegressionDocument11 pagesA Simplified Pavement Condition Index Regressionتغريد رياض وداعهNo ratings yet
- Determinants of Rear-Of-wheel and Tire-Road Wear Particle Emissions by Light-Duty Vehicles Using On-Road and Test Track ExperimentsDocument14 pagesDeterminants of Rear-Of-wheel and Tire-Road Wear Particle Emissions by Light-Duty Vehicles Using On-Road and Test Track ExperimentsKhaled ChekroubaNo ratings yet
- Rutting Performance of Rubberized Porous Asphalt Using Finite ElementDocument10 pagesRutting Performance of Rubberized Porous Asphalt Using Finite ElementRobel TeweldeNo ratings yet
- Measurement of Texture Depth of Pavement Using Potable Laser ProfilerDocument14 pagesMeasurement of Texture Depth of Pavement Using Potable Laser Profilerสํานักวิเคราะห์และตรวจสอบ ส่วนสํารวจและประเมินสภาพทางNo ratings yet
- Field Calibration and Spatial Analysis of CompactiDocument24 pagesField Calibration and Spatial Analysis of CompactiEgika AgungNo ratings yet
- Evaluation of Automatic Drainage Extraction Thresholds Using ASTER GDEM and Cartosat-1 DEM: A Case Study From Basaltic Terrain of Central IndiaDocument10 pagesEvaluation of Automatic Drainage Extraction Thresholds Using ASTER GDEM and Cartosat-1 DEM: A Case Study From Basaltic Terrain of Central Indiavenkatraman20No ratings yet
- Pavement Curling and Warping Analysis Using Wavelet TechniquesDocument17 pagesPavement Curling and Warping Analysis Using Wavelet TechniquesAnonymous MklNL77No ratings yet
- Harmsen ET MADocument14 pagesHarmsen ET MAandreystar1234No ratings yet
- Field Evaluation of Asphalt Concrete Pavement Surface Texture and Skid CharacteristicsDocument15 pagesField Evaluation of Asphalt Concrete Pavement Surface Texture and Skid CharacteristicsAnmar Al-AdlyNo ratings yet
- Detecting Ballast Layer Conditions Using Ground Penetrating RadarDocument2 pagesDetecting Ballast Layer Conditions Using Ground Penetrating Radargangsta kNo ratings yet
- Modelling Highway EmbankmentDocument8 pagesModelling Highway EmbankmentazriNo ratings yet
- Han 2016Document8 pagesHan 2016Sajjad AhmedNo ratings yet
- Analysis of The Pavement Surface Texture by 2016 Transportation Research PaperDocument10 pagesAnalysis of The Pavement Surface Texture by 2016 Transportation Research PaperAllan SanchezNo ratings yet
- GPR Goes Underground to Detect Pipe ConditionsDocument10 pagesGPR Goes Underground to Detect Pipe ConditionsAndri FitriyadiNo ratings yet
- Stability Analysis of Soil Slope Subjected To Blast Induced Vibrations Using FLACDocument11 pagesStability Analysis of Soil Slope Subjected To Blast Induced Vibrations Using FLACResmi RosaliniNo ratings yet
- Brain & EvaDocument19 pagesBrain & Evamobin mathew mathew dNo ratings yet
- 30 Chen2019Document10 pages30 Chen2019alison.pereiraNo ratings yet
- 4-5PagesZaynabspaper 014Document6 pages4-5PagesZaynabspaper 014khoa nam NguyenNo ratings yet
- Quality Assurance and Quality Control of Subgrade Compaction Using The Dynamic Cone PenetrometerDocument11 pagesQuality Assurance and Quality Control of Subgrade Compaction Using The Dynamic Cone PenetrometerTiago João PizoliNo ratings yet
- Assessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsDocument14 pagesAssessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsHT BinhNo ratings yet
- Al-Quadi PaperDocument28 pagesAl-Quadi PaperVidhi VyasNo ratings yet
- Investigation On Performances of Asphalt Mixtures Made With Reclaimed Asphalt Pavement: Effects of Interaction Between Virgin and RAP BitumenDocument11 pagesInvestigation On Performances of Asphalt Mixtures Made With Reclaimed Asphalt Pavement: Effects of Interaction Between Virgin and RAP BitumenVidhi VyasNo ratings yet
- 2021 KucukcaprazaDocument5 pages2021 KucukcaprazaVidhi VyasNo ratings yet
- Evans Et Al Pavement Review - GPR08Document12 pagesEvans Et Al Pavement Review - GPR08Vidhi VyasNo ratings yet
- Characteristics' Relation Model of Asphalt Pavement Performance Based On Factor AnalysisDocument12 pagesCharacteristics' Relation Model of Asphalt Pavement Performance Based On Factor AnalysisVidhi VyasNo ratings yet
- A Decision Making Framework For Condition Evaluation of Airfield Pavements Using Non-Destructive TestingDocument11 pagesA Decision Making Framework For Condition Evaluation of Airfield Pavements Using Non-Destructive TestingVidhi VyasNo ratings yet
- Application of Infrared Thermography For Debonding Detection in Asphalt PavementsDocument13 pagesApplication of Infrared Thermography For Debonding Detection in Asphalt PavementsVidhi VyasNo ratings yet
- A Digital Image Analysis of Gravel Aggregate Using CT Scanning TechniqueDocument8 pagesA Digital Image Analysis of Gravel Aggregate Using CT Scanning TechniqueVidhi VyasNo ratings yet
- Probabilistic Method of Asphalt Binder Selection Based On Pavement TemperatureDocument9 pagesProbabilistic Method of Asphalt Binder Selection Based On Pavement TemperatureVidhi VyasNo ratings yet
- Prediction of Asphalt Pavement Condition Using FWD Deflection Basin Parameters and Artificial Neural NetworksDocument20 pagesPrediction of Asphalt Pavement Condition Using FWD Deflection Basin Parameters and Artificial Neural NetworksVidhi VyasNo ratings yet
- The Strip Clustering Scheme For Data Collection in Large-Scale Wireless Sensing Network of The RoadDocument8 pagesThe Strip Clustering Scheme For Data Collection in Large-Scale Wireless Sensing Network of The RoadVidhi VyasNo ratings yet
- 2003 ZerwerDocument14 pages2003 ZerwerVidhi VyasNo ratings yet
- Entropy-Based Fuzzy SWOT Decision-Making For Condition Assessment of Airfield PavementsDocument13 pagesEntropy-Based Fuzzy SWOT Decision-Making For Condition Assessment of Airfield PavementsVidhi VyasNo ratings yet
- Model To Predict Pavement Temperature Profile: Development and ValidationDocument6 pagesModel To Predict Pavement Temperature Profile: Development and ValidationVidhi VyasNo ratings yet
- 1998 BosscherDocument11 pages1998 BosscherVidhi VyasNo ratings yet
- Method To Prioritize Hazardousness of Locations For Black Spot Identification Using Analytic Hierarchy ProcessDocument11 pagesMethod To Prioritize Hazardousness of Locations For Black Spot Identification Using Analytic Hierarchy ProcessVidhi VyasNo ratings yet
- Allen Davis1, Bemhardt Hertlein2, Malcolm Lim3 and Kevin Michols3Document9 pagesAllen Davis1, Bemhardt Hertlein2, Malcolm Lim3 and Kevin Michols3Vidhi VyasNo ratings yet
- 2004 Ryden ParkDocument10 pages2004 Ryden ParkVidhi VyasNo ratings yet
- 2009 Ryden CastaingsDocument8 pages2009 Ryden CastaingsVidhi VyasNo ratings yet
- Flexible Pavement Analysis Considering Temperature Profile and Anisotropy Behavior in Hot Mix Ashalt LayerDocument6 pagesFlexible Pavement Analysis Considering Temperature Profile and Anisotropy Behavior in Hot Mix Ashalt LayerVidhi VyasNo ratings yet
- Effect of Shear Modulus on Bonding and Stress in Flexible Pavement LayersDocument9 pagesEffect of Shear Modulus on Bonding and Stress in Flexible Pavement LayersVidhi VyasNo ratings yet
- 2012 FengDocument6 pages2012 FengVidhi VyasNo ratings yet
- Finite Element Analysis of Floor Slabs Under Warping EffectDocument7 pagesFinite Element Analysis of Floor Slabs Under Warping EffectVidhi VyasNo ratings yet
- Properties of Asphalt Concrete Layer Interfaces: Technical NotesDocument5 pagesProperties of Asphalt Concrete Layer Interfaces: Technical NotesVidhi VyasNo ratings yet
- 1999 NazarianDocument11 pages1999 NazarianVidhi VyasNo ratings yet
- Ever FeDocument19 pagesEver FeferiNo ratings yet
- Ever Fe PDFDocument4 pagesEver Fe PDFHugo LeiteNo ratings yet
- Finite Element Modeling of Environmental EffectsDocument22 pagesFinite Element Modeling of Environmental EffectsVidhi VyasNo ratings yet
- STD-GPR (Control Unit With Trolley) For All Type of Antenna - Pt. Andalan Tunas MandiriDocument3 pagesSTD-GPR (Control Unit With Trolley) For All Type of Antenna - Pt. Andalan Tunas MandiriBUMI ManilapaiNo ratings yet
- Investigating and Testing Techniques To Verify Depth To Bedrock Models FactsheetDocument2 pagesInvestigating and Testing Techniques To Verify Depth To Bedrock Models FactsheetMichaelNo ratings yet
- MALA MiniMIRA Technical SpecificationsDocument1 pageMALA MiniMIRA Technical SpecificationsALfian FebriantoNo ratings yet
- Q 164 02 BSCPL Bapatla AP Static LateralDocument5 pagesQ 164 02 BSCPL Bapatla AP Static LateralVB665No ratings yet
- Conducting Geotechnical Subsurface Investigations: Standard Practice ForDocument13 pagesConducting Geotechnical Subsurface Investigations: Standard Practice ForXarmdNo ratings yet
- Final Report - Using GPR As Inspection Method For Retaining WallsDocument8 pagesFinal Report - Using GPR As Inspection Method For Retaining WallsDane BautistaNo ratings yet
- Time Team - Castor, CambridgeshireDocument57 pagesTime Team - Castor, CambridgeshireWessex ArchaeologyNo ratings yet
- Lecture9 - GROUND PENETRATING RADARDocument55 pagesLecture9 - GROUND PENETRATING RADARMuhamadSadiqNo ratings yet
- Coastal Wetlands RestorationDocument21 pagesCoastal Wetlands RestorationCarolina SchonNo ratings yet
- Early Imperialism in The Andes Wari Colonisation of NascaDocument20 pagesEarly Imperialism in The Andes Wari Colonisation of NascaCazuja GinNo ratings yet
- Em PDFDocument88 pagesEm PDFFranck Duprey MvogoNo ratings yet
- Omed Tahseen TranslationDocument8 pagesOmed Tahseen Translationomed RekaniNo ratings yet
- Pavement Evaluation PaperDocument14 pagesPavement Evaluation Paperbehzad afridiNo ratings yet
- A Machine Learning Approach For Simulating Ground Penetrating RadarDocument4 pagesA Machine Learning Approach For Simulating Ground Penetrating RadarAbrar WaliNo ratings yet
- Geophysics Exploration - Chapter 6Document43 pagesGeophysics Exploration - Chapter 6Abraham SileshiNo ratings yet
- 13Document5 pages13yash_monu05No ratings yet
- GSSI UtilityScanDFBrochure PDFDocument2 pagesGSSI UtilityScanDFBrochure PDFJoel AlonzoNo ratings yet
- Abstract:: Bi-Dimensional Dynamic Analysis of Seismic Amplification in The Archaeological Park of Sacsayhuaman - CuscoDocument11 pagesAbstract:: Bi-Dimensional Dynamic Analysis of Seismic Amplification in The Archaeological Park of Sacsayhuaman - CuscorpazbNo ratings yet
- D 5730 - 98 Rdu3mzatotgDocument30 pagesD 5730 - 98 Rdu3mzatotgJaneth MendozaNo ratings yet
- Adaptations and Transformations of Hunter-Gatherers in Forest Environments: New Archaeological and Anthropological InsightsDocument14 pagesAdaptations and Transformations of Hunter-Gatherers in Forest Environments: New Archaeological and Anthropological Insightss_cheshpeshNo ratings yet
- Interim Report 2020-LIYURONGDocument17 pagesInterim Report 2020-LIYURONGPushpa KhandelwalNo ratings yet
- Ground Penetrating RadarDocument27 pagesGround Penetrating RadarNag BhushanNo ratings yet
- Ied 2Document97 pagesIed 2myo chitthuNo ratings yet
- WWW - Novatest.it: Testing - Consulting - TrainingDocument16 pagesWWW - Novatest.it: Testing - Consulting - Trainingricardo garavitoNo ratings yet
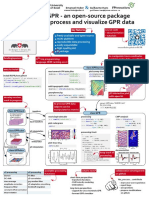
- Huber and Hans (2018) RGPR A New Open Source Software Package For GPR Data ProcessingDocument1 pageHuber and Hans (2018) RGPR A New Open Source Software Package For GPR Data ProcessingunibaselNo ratings yet
- NDT - Rebar Detector 1 (Magnetic)Document22 pagesNDT - Rebar Detector 1 (Magnetic)BMZNo ratings yet
- Assuva Dedektör İngi̇li̇zce Catalog PricesDocument31 pagesAssuva Dedektör İngi̇li̇zce Catalog Pricesg jhNo ratings yet
- Proceq Concrete GPR catalogue-01Document8 pagesProceq Concrete GPR catalogue-01sathiyaseelann.sNo ratings yet
- GPR 2-1 PDFDocument127 pagesGPR 2-1 PDFАлексей SnowmanNo ratings yet
- Research Collection: New Developments in Electrical Resistivity ImagingDocument200 pagesResearch Collection: New Developments in Electrical Resistivity ImagingjaimemanNo ratings yet