You might also like
- Mce14 Textbook 2024 ErosjDocument201 pagesMce14 Textbook 2024 ErosjAbaruray anirtsusNo ratings yet
- Process Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationFrom EverandProcess Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationNo ratings yet
- O Futuro Dos ControladoresDocument13 pagesO Futuro Dos ControladoresRaissa BrancoNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Inno2024 Emt4203 Control II Notes r1Document15 pagesInno2024 Emt4203 Control II Notes r1kabuej3No ratings yet
- SYSTEM DYNAMICS LAB GUIDEDocument22 pagesSYSTEM DYNAMICS LAB GUIDEAnton FerreNo ratings yet
- Distributed Process Control ReportFrom EverandDistributed Process Control ReportNo ratings yet
- Chapter1 Has BeenDocument11 pagesChapter1 Has BeenOlanrewaju EmmanuelNo ratings yet
- FurutaDocument6 pagesFurutaHasy_pakiNo ratings yet
- PLC On-Delay TimerDocument5 pagesPLC On-Delay TimerAdarsh SriwastvaNo ratings yet
- ElectroPneumatics TextbookDocument224 pagesElectroPneumatics TextbookLoforte Salomão Rapoio100% (1)
- Design and Tuning of a Ratio Controller Using PI Controllers and Blend StationDocument13 pagesDesign and Tuning of a Ratio Controller Using PI Controllers and Blend StationShyam SundarNo ratings yet
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Advanced Electropnuematics Its ApplicationsDocument30 pagesAdvanced Electropnuematics Its ApplicationssaruNo ratings yet
- ZN Open Loop MethodDocument7 pagesZN Open Loop MethodKrunoslav CvetkoNo ratings yet
- Frequency Response Based Multivariable Control Design For Motion SystemsDocument6 pagesFrequency Response Based Multivariable Control Design For Motion SystemsGapuk MaboekNo ratings yet
- Control and Instrumentation Training Report: Kariba South Power StationDocument12 pagesControl and Instrumentation Training Report: Kariba South Power StationtrynoskNo ratings yet
- CH01Document11 pagesCH01jackNo ratings yet
- Process ControlDocument24 pagesProcess ControlEr Shubham RaksheNo ratings yet
- PROCESS CONTROL INSTRUMENTATION CASE STUDYDocument18 pagesPROCESS CONTROL INSTRUMENTATION CASE STUDYNor husna binti omarNo ratings yet
- Empirical Tuning Rules According To Ziegler and NicholsDocument3 pagesEmpirical Tuning Rules According To Ziegler and NicholskalajamunNo ratings yet
- Ipedex Instrumentation Training Modules PDFDocument921 pagesIpedex Instrumentation Training Modules PDFshareyhou50% (2)
- Automatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFDocument11 pagesAutomatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFGino PascualliNo ratings yet
- Electro Pneumatics Technical ReferenceDocument110 pagesElectro Pneumatics Technical ReferenceKhanNo ratings yet
- P01-06 - Control Loop - V8.1 - S0915 - ENDocument18 pagesP01-06 - Control Loop - V8.1 - S0915 - ENnelle69No ratings yet
- FME 326 Module 1Document9 pagesFME 326 Module 1Jesse Jon FerolinoNo ratings yet
- Dist06 ExtendedDocument30 pagesDist06 ExtendedChoon Zhe ShyiNo ratings yet
- Lect 1 Introduction To Process ControlDocument4 pagesLect 1 Introduction To Process ControlZaidoon MohsinNo ratings yet
- Structure and Signal Flow of Pneumatic Systems: Chapter 1 (Continued)Document32 pagesStructure and Signal Flow of Pneumatic Systems: Chapter 1 (Continued)Isaac GisoreNo ratings yet
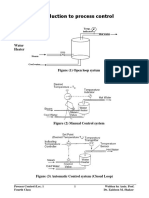
- Introduction To Process ControlDocument48 pagesIntroduction To Process ControlYi Ling GohNo ratings yet
- Chapter 1 Pneumatic SystemDocument19 pagesChapter 1 Pneumatic Systemdivien rajNo ratings yet
- IDECONDocument6 pagesIDECONHùngNo ratings yet
- Design and Tuning of A Ratio ControllerDocument13 pagesDesign and Tuning of A Ratio ControllerEzgi CoşkunNo ratings yet
- Lecture2 3Document25 pagesLecture2 3vrushalibhattNo ratings yet
- Industry Automation and Drive Technologies Training ManualDocument36 pagesIndustry Automation and Drive Technologies Training ManualPop-Coman SimionNo ratings yet
- Pneumatic Auto Feed Punching and Riveting MachineDocument7 pagesPneumatic Auto Feed Punching and Riveting MachineAkgec BoschNo ratings yet
- The Process May Be A Complex Assembly of PhenomenaDocument9 pagesThe Process May Be A Complex Assembly of PhenomenaNishat AnwarNo ratings yet
- Process Instrumentation 1Document61 pagesProcess Instrumentation 1Charles M Lukusa100% (2)
- Integrator Windup and How To Avoid ItDocument6 pagesIntegrator Windup and How To Avoid ItHermogensNo ratings yet
- ME Electives 4 Experiment 6 Conveyor Belt ControlDocument9 pagesME Electives 4 Experiment 6 Conveyor Belt Controlmon patrick pradoNo ratings yet
- Study Switches Logic Circuits DC MotorDocument19 pagesStudy Switches Logic Circuits DC MotorAnil NavaleNo ratings yet
- Lambda Tuning TAPPIDocument12 pagesLambda Tuning TAPPIMariana Alejandra Quioy Woods100% (1)
- Inno2024 Emt4203 Control II Notes r2Document35 pagesInno2024 Emt4203 Control II Notes r2kabuej3No ratings yet
- Advanced Control StrategiesDocument6 pagesAdvanced Control StrategiesHugo EGNo ratings yet
- Chemical Process Variables-1Document47 pagesChemical Process Variables-1Portia ShilengeNo ratings yet
- PID TIA Portal 5Document110 pagesPID TIA Portal 5Yogi KipiantoNo ratings yet
- Chapter 19 Programming The PID AlgorithmDocument103 pagesChapter 19 Programming The PID AlgorithmMr KevinNo ratings yet
- Sensing - Universal PID-Thermoregulator: Application Note AbstractDocument19 pagesSensing - Universal PID-Thermoregulator: Application Note Abstractnqdinh100% (2)
- Chap19 SDocument111 pagesChap19 SIsraelNo ratings yet
- Bulletin 34.5:4195K: Easy Adjustment-Adjusting The Set Point, TheDocument14 pagesBulletin 34.5:4195K: Easy Adjustment-Adjusting The Set Point, TheDjebali MouradNo ratings yet
- Best simple PID tuning rulesDocument27 pagesBest simple PID tuning rulesstathiss11No ratings yet
- Auto-Tuning Control Using Ziegler-NicholsDocument5 pagesAuto-Tuning Control Using Ziegler-NicholsValerian PopescuNo ratings yet
- Control Valve Response: by Mark T. CoughranDocument46 pagesControl Valve Response: by Mark T. CoughranLisa FosterNo ratings yet
- ECNG3004 Control System ApplicationsDocument7 pagesECNG3004 Control System ApplicationsMarlon BoucaudNo ratings yet
- L-14 (SS) (Iac) ( (Ee) Nptel)Document10 pagesL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Closed-Loop Control Toolbox APP-RTT-E-GBDocument11 pagesClosed-Loop Control Toolbox APP-RTT-E-GBLuis Enrique PariapazaNo ratings yet
- CHATTO - Finals - Summer 2022 - Cash Flows & Cap. BudgDocument6 pagesCHATTO - Finals - Summer 2022 - Cash Flows & Cap. BudgJULLIE CARMELLE H. CHATTONo ratings yet
- Form 4Document18 pagesForm 4JULLIE CARMELLE H. CHATTONo ratings yet
- FC ProblemDocument1 pageFC ProblemJULLIE CARMELLE H. CHATTONo ratings yet
- Fernandez Acctg 14N Finals ExamDocument5 pagesFernandez Acctg 14N Finals ExamJULLIE CARMELLE H. CHATTONo ratings yet
- Ans - Midterm - Prob. 2Document1 pageAns - Midterm - Prob. 2JULLIE CARMELLE H. CHATTONo ratings yet
- Computer Audit EthicsDocument3 pagesComputer Audit EthicsJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 7 Decision Making and CreativityDocument3 pagesChapter 7 Decision Making and CreativityJULLIE CARMELLE H. CHATTONo ratings yet
- Answer TranslationDocument1 pageAnswer TranslationJULLIE CARMELLE H. CHATTONo ratings yet
- FCDocument1 pageFCJULLIE CARMELLE H. CHATTONo ratings yet
- ISO 45001 PDCA CycleDocument8 pagesISO 45001 PDCA CycleJULLIE CARMELLE H. CHATTONo ratings yet
- Death Penalty, Abortion, and Juvenile Justice ViewsDocument2 pagesDeath Penalty, Abortion, and Juvenile Justice ViewsJULLIE CARMELLE H. CHATTONo ratings yet
- Computer Audit Ethics Page 2Document6 pagesComputer Audit Ethics Page 2JULLIE CARMELLE H. CHATTONo ratings yet
- From Reo To Nuclear To Nucor Case Study AnalysisDocument7 pagesFrom Reo To Nuclear To Nucor Case Study AnalysisJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 6 Applied Performance Practices NotesDocument4 pagesChapter 6 Applied Performance Practices NotesJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 5Document5 pagesChapter 5JULLIE CARMELLE H. CHATTONo ratings yet
- How Money Impacts Employee Performance & BehaviorDocument1 pageHow Money Impacts Employee Performance & BehaviorJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 10Document2 pagesChapter 10JULLIE CARMELLE H. CHATTONo ratings yet
- Death Penalty DebateDocument1 pageDeath Penalty DebateJULLIE CARMELLE H. CHATTONo ratings yet
- Legal Service Company Cover Page 1Document1 pageLegal Service Company Cover Page 1JULLIE CARMELLE H. CHATTONo ratings yet
- Decision Making BiasesDocument5 pagesDecision Making BiasesJULLIE CARMELLE H. CHATTONo ratings yet
- Case 3 From Reo To Nuclear To Nucor (Key Points)Document4 pagesCase 3 From Reo To Nuclear To Nucor (Key Points)JULLIE CARMELLE H. CHATTONo ratings yet
- Chapters 11 15Document8 pagesChapters 11 15JULLIE CARMELLE H. CHATTONo ratings yet
- TAXATION THEORY AND PRINCIPLESDocument2 pagesTAXATION THEORY AND PRINCIPLESJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 8Document3 pagesChapter 8JULLIE CARMELLE H. CHATTONo ratings yet
- Installment SalesDocument2 pagesInstallment SalesJULLIE CARMELLE H. CHATTONo ratings yet
- Chap 2 Interpretation and ComputationDocument15 pagesChap 2 Interpretation and ComputationJULLIE CARMELLE H. CHATTONo ratings yet
- CHATTO Discipline EssayDocument1 pageCHATTO Discipline EssayJULLIE CARMELLE H. CHATTONo ratings yet
- Chapter 9Document1 pageChapter 9JULLIE CARMELLE H. CHATTONo ratings yet
- Orca Share Media1670374193894 7006057162954118241Document4 pagesOrca Share Media1670374193894 7006057162954118241JULLIE CARMELLE H. CHATTONo ratings yet
- Long Term Construction 1Document1 pageLong Term Construction 1JULLIE CARMELLE H. CHATTONo ratings yet
- How Chips Are DesignedDocument46 pagesHow Chips Are DesignedAli AhmadNo ratings yet
- The Art of Comeback Donald TrumpDocument1 pageThe Art of Comeback Donald TrumpMoYagzud0% (2)
- Year Overview 2012 FinalDocument65 pagesYear Overview 2012 FinalArjenvanLinNo ratings yet
- Mechanical Seminar ListDocument9 pagesMechanical Seminar ListalokbdasNo ratings yet
- Gas LiftDocument4 pagesGas LiftSteve MarfissiNo ratings yet
- Governor's Pleasure and Dismissal of Council of MinistersDocument10 pagesGovernor's Pleasure and Dismissal of Council of MinistersUditanshu MisraNo ratings yet
- Amazon removes restricted supplement listing multiple timesDocument12 pagesAmazon removes restricted supplement listing multiple timesMasood Ur RehmanNo ratings yet
- Toaz - Info Module in Ergonomics and Planning Facilities For The Hospitality Industry PRDocument33 pagesToaz - Info Module in Ergonomics and Planning Facilities For The Hospitality Industry PRma celine villoNo ratings yet
- Wedding Planning GuideDocument159 pagesWedding Planning GuideRituparna Majumder0% (1)
- Innova 2100-IQ, 3100/3100-IQ, 4100/4100-IQ Cardiovascular Imaging System SM DVDDocument1 pageInnova 2100-IQ, 3100/3100-IQ, 4100/4100-IQ Cardiovascular Imaging System SM DVDSwami Meera100% (1)
- ERecon Software Development at Hospital Corporation of America-1553395398 PDFDocument11 pagesERecon Software Development at Hospital Corporation of America-1553395398 PDFKaren CarranzaNo ratings yet
- Blueprint of Banking SectorDocument33 pagesBlueprint of Banking SectormayankNo ratings yet
- Understanding The American Education SystemDocument6 pagesUnderstanding The American Education SystemCastor JavierNo ratings yet
- Gunning 2009Document7 pagesGunning 2009juan diazNo ratings yet
- Lecture 08Document27 pagesLecture 08simraNo ratings yet
- CPAR Summary - WK 144Document6 pagesCPAR Summary - WK 144NagarajNo ratings yet
- Apollo Experience Report Lunar Module Landing Gear SubsystemDocument60 pagesApollo Experience Report Lunar Module Landing Gear SubsystemBob Andrepont100% (3)
- To Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowDocument1 pageTo Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowLester Jao SegubanNo ratings yet
- Tech Note FormatDocument2 pagesTech Note FormatUgonna OhiriNo ratings yet
- T-18 - Recommended Target Analysis For Ductile IronsDocument2 pagesT-18 - Recommended Target Analysis For Ductile Ironscrazy dNo ratings yet
- Elementos ElectrónicosDocument9 pagesElementos ElectrónicosKratt DeividNo ratings yet
- Electrical Machine 7-26-2016Document94 pagesElectrical Machine 7-26-2016Engr. Raheel khanNo ratings yet
- Price List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidDocument106 pagesPrice List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidarifNo ratings yet
- Format Transmittal - TemplateDocument1 pageFormat Transmittal - TemplateavriamandaNo ratings yet
- C++ Module 2Document58 pagesC++ Module 2Kaye CariñoNo ratings yet
- Differendial Pressure Flow MetersDocument1 pageDifferendial Pressure Flow Metersborn2engineerNo ratings yet
- Safety and Quality of Health Care System in IndiaDocument18 pagesSafety and Quality of Health Care System in IndiaKNOWLEDGE FeedNo ratings yet
- International Financial Law Reforms After Global CrisisDocument5 pagesInternational Financial Law Reforms After Global CrisisВладиславNo ratings yet
- OptiLobe Rotary Lobe PumpDocument4 pagesOptiLobe Rotary Lobe PumpRemus-Mihai GheorghitaNo ratings yet
- JKM320PP-72 305-320 Watt Poly Crystalline Solar Module Technical SpecificationsDocument2 pagesJKM320PP-72 305-320 Watt Poly Crystalline Solar Module Technical SpecificationsRonal100% (1)