You might also like
- Structural Design of Railways and Pavements Group 5Document16 pagesStructural Design of Railways and Pavements Group 5Jayson J. Pagal50% (2)
- Template For Preparing TANSCST ProposalDocument6 pagesTemplate For Preparing TANSCST ProposalAntony88% (8)
- Railway Engineering Vtu NotesDocument10 pagesRailway Engineering Vtu NotesHanamant HunashikattiNo ratings yet
- Pavement Deterioration and Its CausesDocument7 pagesPavement Deterioration and Its Causesخيرالله موسى نوافNo ratings yet
- Lec 04 Traffic Signal and CoordinationDocument17 pagesLec 04 Traffic Signal and CoordinationDr Firas Asad100% (1)
- Designing For Safety - Geometric DesignDocument36 pagesDesigning For Safety - Geometric DesignRaghu Veer Pushadapu0% (1)
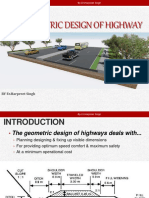
- Highway-Geometric-Design SolutionDocument54 pagesHighway-Geometric-Design SolutionNajeebullah MandokhailNo ratings yet
- Chapter 4 Geometric DesignDocument65 pagesChapter 4 Geometric DesignISABIRYE BAKALINo ratings yet
- CH-2 Geometric Design HODocument23 pagesCH-2 Geometric Design HOBebi WakaNo ratings yet
- Introduction To Railway Engineering PDFDocument114 pagesIntroduction To Railway Engineering PDFharshvardhan JhaNo ratings yet
- Geometric Design of Railways TracksDocument21 pagesGeometric Design of Railways TracksJACOB CHIMIDZINo ratings yet
- Vertical Curves ExplainedDocument8 pagesVertical Curves ExplainedRJay DorojaNo ratings yet
- Highway Cross Section ElementsDocument18 pagesHighway Cross Section ElementsPRITI DAS100% (2)
- Level of Service of RoadsDocument15 pagesLevel of Service of RoadsaqilahNo ratings yet
- 5 PPT GD of ROADSDocument58 pages5 PPT GD of ROADSMudduKrishna shettyNo ratings yet
- Traffic Loading Analysis For Highway PavementsDocument15 pagesTraffic Loading Analysis For Highway PavementsBernadette Abanto100% (1)
- TRANSPO Traffic Engg Studies 2Document20 pagesTRANSPO Traffic Engg Studies 2Eury AlzagaNo ratings yet
- Geometric Design of Highways for Optimal Traffic FlowDocument123 pagesGeometric Design of Highways for Optimal Traffic FlowGadisa TeferaNo ratings yet
- NewpptmmsDocument28 pagesNewpptmmsVaibhav Jain0% (1)
- What Is Highway EngineeringDocument4 pagesWhat Is Highway EngineeringNagesh SinghNo ratings yet
- Geometric Design Lect 6,7,8-2Document64 pagesGeometric Design Lect 6,7,8-2pritam BhowmikNo ratings yet
- Traffic ConflictsDocument7 pagesTraffic ConflictsAngel HasnaNo ratings yet
- Materials Manual - Oct 2014Document78 pagesMaterials Manual - Oct 2014Raphael MwilaNo ratings yet
- Curves and Superelevation OptimizationDocument43 pagesCurves and Superelevation OptimizationGunjan KumarNo ratings yet
- Sight DistanceDocument4 pagesSight DistanceAbdur RahmanNo ratings yet
- Curve Criteria RealignmentDocument12 pagesCurve Criteria RealignmentSuciu FlorinNo ratings yet
- Rotary IntersectionDocument24 pagesRotary IntersectionPark Leo0% (1)
- IRC - Road ClassDocument6 pagesIRC - Road ClassKaustubh Sohoni50% (2)
- RAILWAYS, CurvesDocument37 pagesRAILWAYS, CurvesShoaib NasirNo ratings yet
- Chapter 3 Geometric DesignDocument44 pagesChapter 3 Geometric DesignMul'ataa Vission AbdiisaaNo ratings yet
- CH 03 Characteristics of Road Users PDFDocument130 pagesCH 03 Characteristics of Road Users PDFChristian John SaludarNo ratings yet
- Railway Engineering Assignment AnalysisDocument11 pagesRailway Engineering Assignment AnalysisSwopnil KalikaNo ratings yet
- Width of Widening of A Curve Section of RoadDocument21 pagesWidth of Widening of A Curve Section of Roadjdr100% (1)
- CURVESDocument30 pagesCURVESPHULARAM PEGUNo ratings yet
- Stopping Sight DistanceDocument28 pagesStopping Sight DistanceEman MousaNo ratings yet
- Reading Assignment: P. 45-72 (4 Ed.) p.45-75 (Previous Ed.) in Mannering TextbookDocument26 pagesReading Assignment: P. 45-72 (4 Ed.) p.45-75 (Previous Ed.) in Mannering TextbookMohamed Imbarek EsekbiNo ratings yet
- Construction of TracksDocument74 pagesConstruction of TracksCooldeep LastlongerNo ratings yet
- Introduction To Highway Engineering: 1. Importance of TransportationDocument7 pagesIntroduction To Highway Engineering: 1. Importance of TransportationFrancis AguisandaNo ratings yet
- CE 404-Lecture-1 (Course Description and Cross Section, Road Capacity)Document41 pagesCE 404-Lecture-1 (Course Description and Cross Section, Road Capacity)Yasser AlghrafyNo ratings yet
- Traffic Congestion, Mitigation and Air QualityDocument19 pagesTraffic Congestion, Mitigation and Air QualitySivaiah GuttiNo ratings yet
- 6.5 Marshal Stability Test-LecturepdfDocument36 pages6.5 Marshal Stability Test-LecturepdfRajesh KhadkaNo ratings yet
- Traffic Design and Visual AidsDocument40 pagesTraffic Design and Visual AidsPrakash SamshiNo ratings yet
- Highway Engineering: Subject Code - CE 2255Document43 pagesHighway Engineering: Subject Code - CE 2255HanafiahHamzahNo ratings yet
- Survey Presentation Geometric DesignDocument70 pagesSurvey Presentation Geometric DesignRomeo Beding Densen Jr.100% (1)
- Traffic Stream CharacteristicsDocument9 pagesTraffic Stream Characteristicsreashmaps100% (1)
- HIGHWAY PAVEMENT DESIGN AND CONSTRUCTION GUIDELINESDocument82 pagesHIGHWAY PAVEMENT DESIGN AND CONSTRUCTION GUIDELINESdist2235No ratings yet
- Traffic Volume Study 2nd PartDocument35 pagesTraffic Volume Study 2nd Partمھد مھيNo ratings yet
- 2-Track and Its ComponentsDocument121 pages2-Track and Its Componentsarpit_089No ratings yet
- Lec 07 Traffic Accidents PDFDocument10 pagesLec 07 Traffic Accidents PDFDr Firas AsadNo ratings yet
- Lec 01 Traffic Time and Delays StudiesDocument10 pagesLec 01 Traffic Time and Delays StudiesDr Firas Asad100% (2)
- Highway Maintenance 2003Document80 pagesHighway Maintenance 2003Pranesh Gr100% (1)
- Geometrical Design of HighwayDocument65 pagesGeometrical Design of Highwayjong LacNo ratings yet
- LECTURE NO 10 (Intersection)Document40 pagesLECTURE NO 10 (Intersection)Arman AliNo ratings yet
- Highway Chapter 2 Road ClassificationDocument24 pagesHighway Chapter 2 Road ClassificationIr Ahmad NazriNo ratings yet
- HIGHWAY ENGINEERING (2marks) PDFDocument10 pagesHIGHWAY ENGINEERING (2marks) PDFGanesh Padmanaban100% (2)
- Road Development in IndiaDocument13 pagesRoad Development in IndiaSatish SajjaNo ratings yet
- Ce 404-Sec11Document20 pagesCe 404-Sec11Yasser AlghrafyNo ratings yet
- Geometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and Earthworks - CompressDocument23 pagesGeometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and Earthworks - Compress201240290No ratings yet
- Module 2 - Highway ReviewerDocument10 pagesModule 2 - Highway ReviewerAlvanna ParondaNo ratings yet
- Design Criteria For Highways and RailwaysDocument26 pagesDesign Criteria For Highways and RailwaysKareen Mae MutiaNo ratings yet
- Geometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and EarthworksDocument21 pagesGeometric Design For Highways and Railways Including Cross Sections Horizontal and Vertical Alignments Super Elevation and EarthworksJannila PaulinoNo ratings yet
- HGD QP SolutionDocument68 pagesHGD QP Solutionmomin sialNo ratings yet
- Understanding Society and CultureDocument7 pagesUnderstanding Society and CultureNarte, Angelo C.No ratings yet
- 05 Search-Report-Format v2Document3 pages05 Search-Report-Format v2ESON29 VIDEO COLLECTION LECTIOericksonNo ratings yet
- EVALUATION-EXAM-13Document5 pagesEVALUATION-EXAM-13madellekylenetabinas01No ratings yet
- Starrailstation Warp DataDocument8 pagesStarrailstation Warp DataFazle Mawla PashaNo ratings yet
- Chapter 6 AssessmentDocument7 pagesChapter 6 AssessmentNarte, Angelo C.No ratings yet
- Chapter 4 AssessmentDocument9 pagesChapter 4 AssessmentNarte, Angelo C.No ratings yet
- Contemporary WorldDocument42 pagesContemporary WorldAngelica Villarias PitelosNo ratings yet
- Geography Chapter 1 AssessmentDocument6 pagesGeography Chapter 1 AssessmentNarte, Angelo C.No ratings yet
- Human Relations & ASEAN IntegrationDocument11 pagesHuman Relations & ASEAN IntegrationNarte, Angelo C.No ratings yet
- Chapter 2 Assessment PDFDocument5 pagesChapter 2 Assessment PDFNarte, Angelo C.No ratings yet
- Construction Materials and Testing Lab2Document2 pagesConstruction Materials and Testing Lab2Narte, Angelo C.No ratings yet
- Indigenous Language and CultureDocument6 pagesIndigenous Language and CultureNarte, Angelo C.No ratings yet
- Introduction to Railway Design ComponentsDocument5 pagesIntroduction to Railway Design ComponentsNarte, Angelo C.No ratings yet
- Ce CMTDocument11 pagesCe CMTNarte, Angelo C.No ratings yet
- Specific WeightsDocument13 pagesSpecific WeightsNarte, Angelo C.No ratings yet
- Eng Uti G7Document10 pagesEng Uti G7Narte, Angelo C.No ratings yet
- Abalajen, Missy E. Bsce 2A Culture and Society in Southeast Asia Outcome-Based AssessmentDocument10 pagesAbalajen, Missy E. Bsce 2A Culture and Society in Southeast Asia Outcome-Based AssessmentNarte, Angelo C.No ratings yet
- General Properties of MaterialsDocument25 pagesGeneral Properties of MaterialsCarmella Umayam GermanoNo ratings yet
- Engg Utilities 1 - Group 6Document20 pagesEngg Utilities 1 - Group 6Narte, Angelo C.No ratings yet
- Ce - 313 Group 5Document29 pagesCe - 313 Group 5Narte, Angelo C.No ratings yet
- Lecture 2A Fresh ConcreteDocument13 pagesLecture 2A Fresh ConcreteNarte, Angelo C.No ratings yet
- Abalajen, Missy E. Bsce 2A Culture and Society of Southeast Asia / Outcome-Based AssessmentDocument6 pagesAbalajen, Missy E. Bsce 2A Culture and Society of Southeast Asia / Outcome-Based AssessmentNarte, Angelo C.No ratings yet
- Loads and load factorsDocument1 pageLoads and load factorsNarte, Angelo C.No ratings yet
- Factor by Which Unit Is Multiplied Prefix Name SymbolDocument1 pageFactor by Which Unit Is Multiplied Prefix Name SymbolNarte, Angelo C.No ratings yet
- Structural Geology and Rock Mechanics: Important TermsDocument19 pagesStructural Geology and Rock Mechanics: Important TermsNarte, Angelo C.No ratings yet
- Definition of Structural Geology: Compass Direction ViewsDocument4 pagesDefinition of Structural Geology: Compass Direction ViewsNarte, Angelo C.No ratings yet
- Soil Mechanics FundamentalsDocument58 pagesSoil Mechanics FundamentalsNarte, Angelo C.No ratings yet
- Geological MapDocument5 pagesGeological MapNarte, Angelo C.No ratings yet
- Port Er's Nat Iona L Dia Mon D Co Mpe Titiv Ea Dva Ntag Eof Natio NS'Document45 pagesPort Er's Nat Iona L Dia Mon D Co Mpe Titiv Ea Dva Ntag Eof Natio NS'Soha KhanNo ratings yet
- Thesis Supervisor Recommendation With Representative Content and Information RetrievalDocument8 pagesThesis Supervisor Recommendation With Representative Content and Information RetrievalIlmiMardatillahNo ratings yet
- Electrical Machine 7-26-2016Document94 pagesElectrical Machine 7-26-2016Engr. Raheel khanNo ratings yet
- MCMT 2 eDocument461 pagesMCMT 2 eRonNo ratings yet
- HACCP Plan With Flow Chart-1Document23 pagesHACCP Plan With Flow Chart-1Anonymous aZA07k8TXfNo ratings yet
- Automatic Transfer Switch (ATS) : I. History and BackgroundDocument3 pagesAutomatic Transfer Switch (ATS) : I. History and BackgroundJon Lorde BolivarNo ratings yet
- Answer Key Determinants & Matrices: B C C B B C D A B CDocument2 pagesAnswer Key Determinants & Matrices: B C C B B C D A B CElbert EinsteinNo ratings yet
- Director Infrastructure Technology Data Center in Atlanta GA Resume Thiron BarrDocument4 pagesDirector Infrastructure Technology Data Center in Atlanta GA Resume Thiron BarrThironBarrNo ratings yet
- Fnce 220: Business Finance: Lecture 6: Capital Investment DecisionsDocument39 pagesFnce 220: Business Finance: Lecture 6: Capital Investment DecisionsVincent KamemiaNo ratings yet
- CIO Executive SummaryDocument8 pagesCIO Executive SummaryResumeBearNo ratings yet
- Total Standards: - Total Sub-Standards: - Total ESR StandardsDocument8 pagesTotal Standards: - Total Sub-Standards: - Total ESR StandardsHCX dghhqNo ratings yet
- Much NeedeDocument11 pagesMuch NeedeRijul KarkiNo ratings yet
- Un Authorised Sites Regularisation Within Sept 2009Document2 pagesUn Authorised Sites Regularisation Within Sept 2009Sridhara babu. N - ಶ್ರೀಧರ ಬಾಬು. ಎನ್No ratings yet
- Kalokal Barangay Highway HillsDocument35 pagesKalokal Barangay Highway HillsDixie MirandaNo ratings yet
- Elite Physics G10 T2 SLA1Document7 pagesElite Physics G10 T2 SLA1thecubeg0No ratings yet
- Example - Complete Model of Eng Management ReportDocument38 pagesExample - Complete Model of Eng Management ReportSyah RullacmarNo ratings yet
- AI Writing Tools For Social Media Marketing Creating Compelling PostsDocument5 pagesAI Writing Tools For Social Media Marketing Creating Compelling PostsJames DanielsNo ratings yet
- Supreme Court: Arsenio C. Villalon, Jr. For Petitioner. Labaguis, Loyola, Angara & Associates For Private RespondentDocument43 pagesSupreme Court: Arsenio C. Villalon, Jr. For Petitioner. Labaguis, Loyola, Angara & Associates For Private RespondentpiaNo ratings yet
- Task 7 Family Disaster Risk Reduction and Management PlanDocument7 pagesTask 7 Family Disaster Risk Reduction and Management PlanHaise SasakiNo ratings yet
- Air ConditionDocument4 pagesAir ConditionTaller Energy EnergyNo ratings yet
- Artificial IntelligenceDocument4 pagesArtificial IntelligencePrax DNo ratings yet
- United States Telecom Association v. Federal Communications Commission, US Court of Appeals, District of Columbia Circuit, 14 June 2016Document184 pagesUnited States Telecom Association v. Federal Communications Commission, US Court of Appeals, District of Columbia Circuit, 14 June 2016MowanNo ratings yet
- To Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowDocument1 pageTo Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowLester Jao SegubanNo ratings yet
- CV (Muhammad Irfan Khan)Document3 pagesCV (Muhammad Irfan Khan)Niazi_sabNo ratings yet
- SE John Deere 6020 Series Filter Overview and Capacities 6120 6120L 6220 6220L 6320 6320L 6420 6420L 6520L NOV20Document2 pagesSE John Deere 6020 Series Filter Overview and Capacities 6120 6120L 6220 6220L 6320 6320L 6420 6420L 6520L NOV20marianNo ratings yet
- Ultra Life ER14250 DatasheetDocument2 pagesUltra Life ER14250 DatasheetArslan AwanNo ratings yet
- RRB GR1Document2 pagesRRB GR1Eniyav DragneelNo ratings yet
- Hydraulic Shovel: Engine BucketDocument32 pagesHydraulic Shovel: Engine BucketJulio CRNo ratings yet
- Etextbook 978 0078025884 Accounting Information Systems 4th EditionDocument61 pagesEtextbook 978 0078025884 Accounting Information Systems 4th Editionmark.dame383100% (49)