You might also like
- CJC Mathematics Department Explores Parametric EquationsDocument13 pagesCJC Mathematics Department Explores Parametric Equationscoyite8695No ratings yet
- FM Core Pure Exam C SolutionsDocument10 pagesFM Core Pure Exam C SolutionsdsfafasdNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument48 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Week04Module03 FourierTransformsDocument13 pagesWeek04Module03 FourierTransformsrra127No ratings yet
- 1.09 Parametric Plotting Literacy: Tfrom0to2Document6 pages1.09 Parametric Plotting Literacy: Tfrom0to2Sri RaghavanNo ratings yet
- Unit IVDocument12 pagesUnit IVAbhimanyu PerumalNo ratings yet
- ECNG4302 SlideSet 1Document18 pagesECNG4302 SlideSet 1Mohammed ElsayedNo ratings yet
- CHAPTER 6 AUTOCORRELATION (Lec 12Document52 pagesCHAPTER 6 AUTOCORRELATION (Lec 12HATNo ratings yet
- P4 Exercise 6GDocument3 pagesP4 Exercise 6GPffflyers KurnawanNo ratings yet
- Operational Solution of Fractional Differential EquationsDocument32 pagesOperational Solution of Fractional Differential Equationscarlos9leoNo ratings yet
- Seminar 'Signals and Systems 1': Properties of Signals in Time- and Frequency DomainDocument8 pagesSeminar 'Signals and Systems 1': Properties of Signals in Time- and Frequency DomainUmmu Abiha AssociatesNo ratings yet
- Notes 3 6382 Complex IntegrationDocument46 pagesNotes 3 6382 Complex IntegrationMariam MugheesNo ratings yet
- Spectrum Analyzer Lab ReportDocument16 pagesSpectrum Analyzer Lab ReportMohammed EllafiNo ratings yet
- Mathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringDocument33 pagesMathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringJohn SmithNo ratings yet
- Response of Sdof Systems Subjected To Time-Dependent External ForceDocument8 pagesResponse of Sdof Systems Subjected To Time-Dependent External Force16abd.la2No ratings yet
- Problem 1Document3 pagesProblem 1azoozNo ratings yet
- MDUDocument41 pagesMDUBabita GoyalNo ratings yet
- Arima R ProgramasDocument27 pagesArima R ProgramasVladimiro Ibañez QuispeNo ratings yet
- ME302 - Final Exam Formula SheetDocument2 pagesME302 - Final Exam Formula SheetAnil YildizNo ratings yet
- 2203BPS - Final Exam2009 - Solutions (1) 2Document7 pages2203BPS - Final Exam2009 - Solutions (1) 2samNo ratings yet
- 3.0 Fourier SeriesDocument17 pages3.0 Fourier SeriesKarmughillaan ManimaranNo ratings yet
- Teoría de Mecanismos Tema 3. VibracionesDocument18 pagesTeoría de Mecanismos Tema 3. VibracionestxabiNo ratings yet
- Bezier Curves and SurfacesDocument10 pagesBezier Curves and SurfacesAniruddho RayNo ratings yet
- 5.5 Heat Capacity and Magnetic Susceptibility of The Ising Ferromagnet in The Mean-Field Approximation. Critical ExponentsDocument10 pages5.5 Heat Capacity and Magnetic Susceptibility of The Ising Ferromagnet in The Mean-Field Approximation. Critical ExponentsAnderson Garcia PovedaNo ratings yet
- EC 8501-DIGITAL COMMUNICATIONSDocument76 pagesEC 8501-DIGITAL COMMUNICATIONSSumeethaNo ratings yet
- BMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Document37 pagesBMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Alooy MohamedNo ratings yet
- Equation of Motion of a Pendulum SystemDocument13 pagesEquation of Motion of a Pendulum Systemkhawaja AliNo ratings yet
- ECE 3512 Lecture 38: State Space Representations and SolutionsDocument12 pagesECE 3512 Lecture 38: State Space Representations and Solutionsahmed_nassef2004No ratings yet
- Muthayammal Engineering College: Ii / Iv DeptDocument3 pagesMuthayammal Engineering College: Ii / Iv DeptB.Deepak CR7No ratings yet
- Notes 3 6382 Complex IntegrationDocument49 pagesNotes 3 6382 Complex IntegrationSamhithaNo ratings yet
- Heat Eqn (1 Dimension) (2nd BVP)Document3 pagesHeat Eqn (1 Dimension) (2nd BVP)Riyad MohammedNo ratings yet
- FormulaeDocument1 pageFormulaeAna Paula BittencourtNo ratings yet
- SheetDocument2 pagesSheetKardelen GündoğanNo ratings yet
- EENG 226 Midterm Exam F13-14 SolnDocument6 pagesEENG 226 Midterm Exam F13-14 SolnTlektes SagingaliyevNo ratings yet
- Recommended Mcqs - 76 Questions - Units and Measurement: Contact Number: 9667591930 / 8527521718Document12 pagesRecommended Mcqs - 76 Questions - Units and Measurement: Contact Number: 9667591930 / 8527521718Devdatta PatilNo ratings yet
- Digital Image Filtering in the Frequency Domain (Circulant MatricesDocument48 pagesDigital Image Filtering in the Frequency Domain (Circulant MatricesanaNo ratings yet
- Objectives:: The State EquationsDocument12 pagesObjectives:: The State EquationsHasan AljabaliNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremPranjal DubeyNo ratings yet
- Spread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceDocument29 pagesSpread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceHimanshu AgrawalNo ratings yet
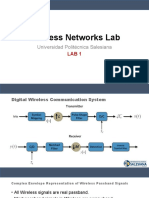
- Wireless Networks Lab: Universidad Politécnica SalesianaDocument22 pagesWireless Networks Lab: Universidad Politécnica SalesianaDiego Andrés CujiNo ratings yet
- Fourier Series Objectives and ExamplesDocument17 pagesFourier Series Objectives and ExamplesShaundre NeoNo ratings yet
- Teoría de Mecanismos Tema 3. VibracionesDocument37 pagesTeoría de Mecanismos Tema 3. VibracionestxabiNo ratings yet
- Convection Integral MethodDocument5 pagesConvection Integral MethodMazen AiNo ratings yet
- Mws Gen Pde PPT ParabolicDocument46 pagesMws Gen Pde PPT ParabolicRamadan Youssef Sakr MoustafaNo ratings yet
- Filtering in the Frequency Domain Using Circulant MatricesDocument48 pagesFiltering in the Frequency Domain Using Circulant MatricesManu PrasadNo ratings yet
- Sheet 1Document1 pageSheet 1Cem BizNo ratings yet
- SheetDocument1 pageSheetCem BizNo ratings yet
- Eigenvalue VineetDocument23 pagesEigenvalue VineetVSNo ratings yet
- Lecture 7 B-SplineDocument23 pagesLecture 7 B-SplineAbdelRahman MahmoudNo ratings yet
- Linear Time Varying State Equation Solutions: EE-601: Linear System TheoryDocument16 pagesLinear Time Varying State Equation Solutions: EE-601: Linear System TheorysunilsahadevanNo ratings yet
- Fourier SeriesDocument46 pagesFourier SeriesSiddhanth VenugopalNo ratings yet
- IPQSDataDocument34 pagesIPQSDataQuốc Đông VũNo ratings yet
- Chapter 5 French DB Short Questions PDFDocument7 pagesChapter 5 French DB Short Questions PDFAman BhatiaNo ratings yet
- Ece 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XDocument4 pagesEce 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XistegNo ratings yet
- Handout 10: Pulse-Code ModulationDocument6 pagesHandout 10: Pulse-Code ModulationkkarthikcnNo ratings yet
- Optimum Receivers For AWGN PDFDocument23 pagesOptimum Receivers For AWGN PDFkostas_ntougias5453No ratings yet
- USNA Acoustics Notes - Chapter 1aDocument17 pagesUSNA Acoustics Notes - Chapter 1aNvlArchNo ratings yet
- Mikota J. (2000): Frequency tuning of a chain structure multi-body oscillator to place the natural frequencies at Omega1 and N-1 integer multiples Omega2 ... Omega N. GAMM 2000, Technical University of Göttingen, Germany.Document2 pagesMikota J. (2000): Frequency tuning of a chain structure multi-body oscillator to place the natural frequencies at Omega1 and N-1 integer multiples Omega2 ... Omega N. GAMM 2000, Technical University of Göttingen, Germany.J MikotaNo ratings yet
- MICexam PDFDocument1 pageMICexam PDFCesar Andres Sierra PardoNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Feature Selection For Time Series ModelingDocument13 pagesFeature Selection For Time Series ModelingBilal AlderbashiNo ratings yet
- MAT 517 Exercises Set 6Document3 pagesMAT 517 Exercises Set 6Bilal AlderbashiNo ratings yet
- Lecture 7Document111 pagesLecture 7Bilal AlderbashiNo ratings yet
- LECTURE 6: Singular Value Decomposition (SVD)Document79 pagesLECTURE 6: Singular Value Decomposition (SVD)Bilal AlderbashiNo ratings yet
- MAT517 Exercises Set 5 (Partial Solutions)Document11 pagesMAT517 Exercises Set 5 (Partial Solutions)Bilal AlderbashiNo ratings yet
- Solving least squares problems using Gram-Schmidt orthogonalizationDocument22 pagesSolving least squares problems using Gram-Schmidt orthogonalizationBilal AlderbashiNo ratings yet
- Gram Schmidt Orthogonalization 100 YearsDocument41 pagesGram Schmidt Orthogonalization 100 YearsBilal AlderbashiNo ratings yet
- Understanding Operating Systems 8th EditionDocument61 pagesUnderstanding Operating Systems 8th Editionjames.crandle29097% (37)
- Gems Choice Board SlidesManiaDocument10 pagesGems Choice Board SlidesManiaNikka CamannongNo ratings yet
- Page 1 of 6Document6 pagesPage 1 of 6allkreeyNo ratings yet
- Iwc DumpDocument6 pagesIwc DumpDâby'sFrânckNo ratings yet
- Learn The Commands of CMDDocument13 pagesLearn The Commands of CMDgdwhhdhncddNo ratings yet
- Case Study On 3D Modeling and AMG PracticesDocument7 pagesCase Study On 3D Modeling and AMG PracticesVince SardinaNo ratings yet
- Introduction To Bioinformatics Lecture 3Document20 pagesIntroduction To Bioinformatics Lecture 3HaMmAd KhAnNo ratings yet
- Qos Perssn 15 S BookDocument20 pagesQos Perssn 15 S BookSai Kyaw HtikeNo ratings yet
- Pcan - P: Peak-S T G HDocument96 pagesPcan - P: Peak-S T G HÖzgür AkayNo ratings yet
- Malloc Lab NotesDocument30 pagesMalloc Lab NotesgregNo ratings yet
- The Old Colonel - Present Perfect PracticeDocument3 pagesThe Old Colonel - Present Perfect PracticeWendy Paola Rodriguez PerezNo ratings yet
- Computer Organization and Architecture Exam QuestionsDocument34 pagesComputer Organization and Architecture Exam QuestionsAbhishek SrivastavaNo ratings yet
- GE MAC-5000 - Service Manual PDFDocument158 pagesGE MAC-5000 - Service Manual PDFGregoryLozanoNo ratings yet
- Time: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code:KNC302Document2 pagesTime: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code:KNC302Ashish RaviNo ratings yet
- 2130 - Advanced Fast Balance - 97059 - 1CD PDFDocument432 pages2130 - Advanced Fast Balance - 97059 - 1CD PDFLuisSilva100% (1)
- MDT Usage Guideline On RTN380AX - Field v1.1 20191225Document23 pagesMDT Usage Guideline On RTN380AX - Field v1.1 20191225metro globalNo ratings yet
- Vocabulary Technology + ExercisesDocument3 pagesVocabulary Technology + ExercisesMaria GómezNo ratings yet
- Case Study 4Document4 pagesCase Study 4Tracy zorcaNo ratings yet
- Analog Output Module: Catalog Number 1762-OF4Document24 pagesAnalog Output Module: Catalog Number 1762-OF4Juan Manuel De La CruzNo ratings yet
- 06-fc1677 Catalyst Tank Temperature - Voltage Below Normal, or Shorted To Low Source PDFDocument3 pages06-fc1677 Catalyst Tank Temperature - Voltage Below Normal, or Shorted To Low Source PDFSuryadiNo ratings yet
- Suneela: Sireesha CSR Systems 862-397-4684Document7 pagesSuneela: Sireesha CSR Systems 862-397-4684kiran2710No ratings yet
- Daftar Siswa SNMPN 2022Document7 pagesDaftar Siswa SNMPN 2022Bestie EpribadehNo ratings yet
- 6MB Telecontrol System: 6MB552 Compact Remote Terminal UnitDocument12 pages6MB Telecontrol System: 6MB552 Compact Remote Terminal Unitfayssal salvadorNo ratings yet
- Laravel Collective HTML Form Installation and UsageDocument9 pagesLaravel Collective HTML Form Installation and UsageVin PixelerNo ratings yet
- Online Educational ResourcesDocument115 pagesOnline Educational ResourcesDr Johan @ Eddy LuaranNo ratings yet
- Prepositions of Place - My RoomDocument1 pagePrepositions of Place - My RoomStela Pavetić100% (1)
- Laptop Price Prediction in Machine Learning Using Random Forest Classifier TechniqueDocument5 pagesLaptop Price Prediction in Machine Learning Using Random Forest Classifier TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Bobcat PDFDocument2 pagesBobcat PDFBart JohnNo ratings yet
- BMW Wiring Symbols & ColorsDocument2 pagesBMW Wiring Symbols & ColorsProfCBSjr86% (7)
- PKWARE - Overview - AK - Ian's NotesDocument11 pagesPKWARE - Overview - AK - Ian's NotesChai QixuanNo ratings yet