You might also like
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- PropulsãoDocument144 pagesPropulsãoANTONIONo ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- Fuel ECUDocument3 pagesFuel ECUmohamedNo ratings yet
- MECH 435 - IC Engine Laboratory ExperimentDocument9 pagesMECH 435 - IC Engine Laboratory Experimentdesie yalewNo ratings yet
- Ata 36 PneumaticDocument32 pagesAta 36 PneumaticA.RamosNo ratings yet
- 079c PDFDocument6 pages079c PDFmohanNo ratings yet
- Development of An Engine Idle Speed and Emission Controller: Masaaki Nagashima, and William S. Levine, Fellow IEEEDocument6 pagesDevelopment of An Engine Idle Speed and Emission Controller: Masaaki Nagashima, and William S. Levine, Fellow IEEEGiovana LanaroNo ratings yet
- To Design An Aircraft Control SystemDocument28 pagesTo Design An Aircraft Control SystemAngel RojoNo ratings yet
- Aspect Regarding of The Pratt & Whitney F100 Jet Engine PerformancesDocument8 pagesAspect Regarding of The Pratt & Whitney F100 Jet Engine PerformancesMASOUDNo ratings yet
- The Study of The Automatic Manual Truck Transmission Clutch PerformanceDocument4 pagesThe Study of The Automatic Manual Truck Transmission Clutch Performancerajsinghbagha2365No ratings yet
- Lab 1a Wind Tunnel Testing Principles & Lift and Drag Coefficients On An AirfoilDocument6 pagesLab 1a Wind Tunnel Testing Principles & Lift and Drag Coefficients On An Airfoilzeeshan khanNo ratings yet
- A Total Energy Control System Design For The Transition Phase of A Tiltrotor Aerial Vehicle ?Document6 pagesA Total Energy Control System Design For The Transition Phase of A Tiltrotor Aerial Vehicle ?Daniel VelázquezNo ratings yet
- ManualDocument29 pagesManualCleber SouzaNo ratings yet
- Control Design For An Advanced Geared Turbofan Engine: Vantage Partners, LLC, Brook Park, OH, 44142, USADocument12 pagesControl Design For An Advanced Geared Turbofan Engine: Vantage Partners, LLC, Brook Park, OH, 44142, USAerrNo ratings yet
- Dayalbagh Educational Institute (Deemed University), Agra Control System Lab Project SynopsisDocument8 pagesDayalbagh Educational Institute (Deemed University), Agra Control System Lab Project SynopsisKrishna Kant TripathiNo ratings yet
- Three Axis Aircraft Autopilot Control Using Genetic Algorithms: An Experimental StudyDocument5 pagesThree Axis Aircraft Autopilot Control Using Genetic Algorithms: An Experimental StudymaryamNo ratings yet
- Department of Aeronautical Engineering Model (Set - I) Answer KeyDocument11 pagesDepartment of Aeronautical Engineering Model (Set - I) Answer KeyCALINNo ratings yet
- A Technique To Determine Lift and Drag Polars in FlightDocument7 pagesA Technique To Determine Lift and Drag Polars in Flightmykingboody2156No ratings yet
- PPL (H) : Part-FCL Question BankDocument29 pagesPPL (H) : Part-FCL Question BankChance 101No ratings yet
- A Mathematical Model of A Twin Ducted Fan VTOL JetpackDocument48 pagesA Mathematical Model of A Twin Ducted Fan VTOL JetpackJon SnowNo ratings yet
- Hinge Moment Theoretical CalculationDocument13 pagesHinge Moment Theoretical CalculationArmghan ShabirNo ratings yet
- Simulation Study of Cooling System Temperature Control Based On Subsection ControlDocument6 pagesSimulation Study of Cooling System Temperature Control Based On Subsection Controlkristianty viaNo ratings yet
- Thrust Two: PrototypeDocument31 pagesThrust Two: PrototypeHadhi Hassan KhanNo ratings yet
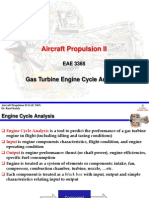
- Aircraft Propulsion II: Gas Turbine Engine Cycle AnalysisDocument61 pagesAircraft Propulsion II: Gas Turbine Engine Cycle AnalysisTaha HashmiNo ratings yet
- Paredes 2016Document6 pagesParedes 2016DIEGO ALEJANDRO CASTILLO RAYMENo ratings yet
- Performance Cycle Analysis On Turbo Fan Engine PW4000: Shray Benawra, Jiqiang Wang, Hong Yue, Georgi DimirovskyDocument6 pagesPerformance Cycle Analysis On Turbo Fan Engine PW4000: Shray Benawra, Jiqiang Wang, Hong Yue, Georgi DimirovskynrNo ratings yet
- Kawasaki FH451V-FH721V 2003 Service Manual PDFDocument153 pagesKawasaki FH451V-FH721V 2003 Service Manual PDFBrianCookNo ratings yet
- Aircraft APU Emissions at Zurich AirportDocument18 pagesAircraft APU Emissions at Zurich AirportAnonymous TDyZWu22S3No ratings yet
- 3228 ColourDocument7 pages3228 ColourBhargava MechNo ratings yet
- To Design An Aircraft Control SystemDocument29 pagesTo Design An Aircraft Control SystemHaqeem SNo ratings yet
- Green Publication,+Journal+Manager,+EEE 7 2017 1Document7 pagesGreen Publication,+Journal+Manager,+EEE 7 2017 1FrkanNo ratings yet
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşNo ratings yet
- RPP 2021 - Project Guidelines and Work PackagesDocument25 pagesRPP 2021 - Project Guidelines and Work PackagespintuNo ratings yet
- Cummins CRDocument40 pagesCummins CRАлексей Миронов100% (6)
- Final Assessment Pneumatics and Hydraulics SystemsDocument9 pagesFinal Assessment Pneumatics and Hydraulics SystemsJohn Laurence Gonzaga AlcantaraNo ratings yet
- 1 - Exergetic - Analysis - of - An Aircraft - Turbojet - EngineDocument14 pages1 - Exergetic - Analysis - of - An Aircraft - Turbojet - Enginemehdi siyahiNo ratings yet
- Study of A para Glider Landing System For The Apollo Command ModuleDocument298 pagesStudy of A para Glider Landing System For The Apollo Command ModuleBob Andrepont100% (1)
- 2011 Kowalski Adaptive Jet EnginesDocument10 pages2011 Kowalski Adaptive Jet EnginesprgilsonNo ratings yet
- Active Landing GearDocument9 pagesActive Landing GearMahendra Singh ParodaNo ratings yet
- Student ResourceDocument454 pagesStudent ResourceAlexander Mcfarlane100% (2)
- Design and Optimization of Control System For Controllable Pitch Propeller With Load ProtectionDocument6 pagesDesign and Optimization of Control System For Controllable Pitch Propeller With Load Protectionjulianasange8No ratings yet
- Design of Flight Control System Mechanism For National Glider GL-1Document7 pagesDesign of Flight Control System Mechanism For National Glider GL-1ricardo pelinNo ratings yet
- Engineering Aspects of Cabin Air QualityDocument8 pagesEngineering Aspects of Cabin Air QualityRaghuThimmegowdaNo ratings yet
- 1999 Kitfox IV Analysis Final VersionDocument9 pages1999 Kitfox IV Analysis Final VersionJoseph LeeNo ratings yet
- UAV AutoPilot PDFDocument6 pagesUAV AutoPilot PDFMococo CatNo ratings yet
- Notice of RetractionDocument6 pagesNotice of RetractionErna UtamiNo ratings yet
- Analysis Calculation Performance Engine Turbofan Cfm56Document8 pagesAnalysis Calculation Performance Engine Turbofan Cfm56AswanTajuddin100% (1)
- Study of Impulse Turbine Performance CharactersticsDocument22 pagesStudy of Impulse Turbine Performance CharactersticsDipranjan GuptaNo ratings yet
- Flight Test of GL-1 Glider Half Scale PrototypeDocument14 pagesFlight Test of GL-1 Glider Half Scale Prototypericardo pelinNo ratings yet
- Fight Control SystemDocument7 pagesFight Control SystemIronMaidenNo ratings yet
- Three Axis Aircraft Autopilot Control Using Genetic Algorithms An Experimental StudyDocument4 pagesThree Axis Aircraft Autopilot Control Using Genetic Algorithms An Experimental StudySri WahyuniNo ratings yet
- Analysis of Technical Characteristics of Fixed-Wing VTOL UAVDocument5 pagesAnalysis of Technical Characteristics of Fixed-Wing VTOL UAVKependra BhairamNo ratings yet
- Energy: Cesare Tona, Paolo Antonio Raviolo, Luiz Felipe Pellegrini, Silvio de Oliveira Ju NiorDocument8 pagesEnergy: Cesare Tona, Paolo Antonio Raviolo, Luiz Felipe Pellegrini, Silvio de Oliveira Ju NiorIlham MaulanaNo ratings yet
- Modeling and Switching Fuzzy Control of The Air PaDocument9 pagesModeling and Switching Fuzzy Control of The Air PaEmrh YsltsNo ratings yet
- Experimental and Computational Design and Testing of A Valve Less Pulsejet Engine For The Application of Micro Air VehicleDocument11 pagesExperimental and Computational Design and Testing of A Valve Less Pulsejet Engine For The Application of Micro Air VehicleJyotiraditya BhardwajNo ratings yet
- Air Engine Literature ReviewDocument6 pagesAir Engine Literature Reviewafmzkbysdbblih100% (1)
- ENGR6012 Assignment #1: Mechanical Vibrations and Condition MonitoringDocument8 pagesENGR6012 Assignment #1: Mechanical Vibrations and Condition MonitoringUsama MughalNo ratings yet
- Optimal and Pid Controller For Controlling CameraDocument10 pagesOptimal and Pid Controller For Controlling CameraaliramezanidehajNo ratings yet
- Paper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Document10 pagesPaper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Singgih Satrio WibowoNo ratings yet
- 217154403Document182 pages217154403ethiopian art2020No ratings yet
- Csni r2011 14Document29 pagesCsni r2011 14ethiopian art2020No ratings yet
- Dokumen - Tips Lecture 7 Descent Performance Aircraft Weight PerformanceDocument22 pagesDokumen - Tips Lecture 7 Descent Performance Aircraft Weight Performanceethiopian art2020No ratings yet
- International Journal of Heat and Technology: Received: 25 November 2019 Accepted: 6 November 2020Document8 pagesInternational Journal of Heat and Technology: Received: 25 November 2019 Accepted: 6 November 2020ethiopian art2020No ratings yet
- ADKAR ModelDocument1 pageADKAR Modelethiopian art2020No ratings yet
- CFD Lecture 2Document23 pagesCFD Lecture 2ethiopian art2020No ratings yet
- CFD Lecture 1Document8 pagesCFD Lecture 1ethiopian art2020No ratings yet
- Chapter 1Document20 pagesChapter 1ethiopian art2020No ratings yet
- CFD Lecture 5Document8 pagesCFD Lecture 5ethiopian art2020No ratings yet
- Contour Plots: /S), Thrust Loading (T /WDocument13 pagesContour Plots: /S), Thrust Loading (T /Wethiopian art2020No ratings yet
- 05 PST NotesDocument100 pages05 PST Notesethiopian art2020No ratings yet
- Project ProposalDocument7 pagesProject Proposalethiopian art2020No ratings yet
- Tutorial CFD Study PDFDocument38 pagesTutorial CFD Study PDFYamina HarnaneNo ratings yet
- The Definitions of The Angles of Incidence and of SideslipDocument18 pagesThe Definitions of The Angles of Incidence and of Sideslipethiopian art2020No ratings yet
- Aasav3n3spl 12Document6 pagesAasav3n3spl 12ethiopian art2020No ratings yet
- Ansys Workbench Structural Tutorial PDFDocument2 pagesAnsys Workbench Structural Tutorial PDFethiopian art2020No ratings yet
- Graphical Methods-SummaryDocument1 pageGraphical Methods-Summaryethiopian art2020No ratings yet
- Aerodynamic Analysisof Gas Turbines Combustion Chambersusing CFDDocument12 pagesAerodynamic Analysisof Gas Turbines Combustion Chambersusing CFDethiopian art2020No ratings yet
- 33349-Article Text-51951-1-10-20201106Document7 pages33349-Article Text-51951-1-10-20201106ethiopian art2020No ratings yet
- CombustionDocument1 pageCombustionethiopian art2020No ratings yet
- J. Cheng-Baron, M. D. Nelson, C. R. Tomczak, K. Chow, J. A. Ezekowitz, M. J. Haykowsky, D. I. Paterson, and R. B. ThompsonDocument1 pageJ. Cheng-Baron, M. D. Nelson, C. R. Tomczak, K. Chow, J. A. Ezekowitz, M. J. Haykowsky, D. I. Paterson, and R. B. Thompsonethiopian art2020No ratings yet
- 345s02p2 PDFDocument10 pages345s02p2 PDFJames Nevin GoNo ratings yet
- Design and Analysis of Automobile Muffler: International Journal of Pure and Applied Mathematics No. 5 2018, 1053-1060Document8 pagesDesign and Analysis of Automobile Muffler: International Journal of Pure and Applied Mathematics No. 5 2018, 1053-1060ethiopian art2020No ratings yet
- Automatic Load Frequency Control of Multi Area Power SystemsDocument76 pagesAutomatic Load Frequency Control of Multi Area Power SystemsPyare MohanNo ratings yet
- High Speed Vehicle Detection in Vehicular Ad-Hoc Network: Rajendra Prasad NayakDocument48 pagesHigh Speed Vehicle Detection in Vehicular Ad-Hoc Network: Rajendra Prasad Nayakethiopian art2020No ratings yet
- Numerical Study of Crystallization Process Using CFD Tools: SubmittedDocument58 pagesNumerical Study of Crystallization Process Using CFD Tools: Submittedethiopian art2020No ratings yet
- Fundamental Concepts: IndependentDocument15 pagesFundamental Concepts: Independentethiopian art2020No ratings yet
- Academic Affairs Office Indian Institute of Technology RoorkeeDocument7 pagesAcademic Affairs Office Indian Institute of Technology Roorkeeethiopian art2020No ratings yet
- Design and Analysis of A Connecting Rod For The 117kw Six Cylinders Turbocharged Diesel EngineDocument9 pagesDesign and Analysis of A Connecting Rod For The 117kw Six Cylinders Turbocharged Diesel Engineethiopian art2020No ratings yet
- Brochure - OasisDocument24 pagesBrochure - OasisVivek RNo ratings yet
- FS 1 Episode 2Document6 pagesFS 1 Episode 2Jayson Garcillan UmipigNo ratings yet
- 2017LR72 - SUMMARY REPORT Final 03052020Document72 pages2017LR72 - SUMMARY REPORT Final 03052020Dung PhamNo ratings yet
- Lecture BouffonDocument1 pageLecture BouffonCarlos Enrique GuerraNo ratings yet
- World BankDocument28 pagesWorld BankFiora FarnazNo ratings yet
- ENSC1001 Unit Outline 2014Document12 pagesENSC1001 Unit Outline 2014TheColonel999No ratings yet
- Cummins: ISX15 CM2250Document17 pagesCummins: ISX15 CM2250haroun100% (4)
- Design of Purlins: Try 75mm X 100mm: Case 1Document12 pagesDesign of Purlins: Try 75mm X 100mm: Case 1Pamela Joanne Falo AndradeNo ratings yet
- Entrepreneurial MotivationDocument18 pagesEntrepreneurial MotivationRagavendra RagsNo ratings yet
- M2252D PS PDFDocument36 pagesM2252D PS PDFCarmen da SilvaNo ratings yet
- General Return Service Agreement (RSA) GuidelinesDocument2 pagesGeneral Return Service Agreement (RSA) GuidelinesJune Francis AngNo ratings yet
- Dummy 13 Printable Jointed Figure Beta FilesDocument9 pagesDummy 13 Printable Jointed Figure Beta FilesArturo GuzmanNo ratings yet
- A Vocabulary of Latin Nouns and AdnounsDocument129 pagesA Vocabulary of Latin Nouns and Adnounsthersitesslaughter-1No ratings yet
- The Perception of Luxury Cars MA Thesis 25 03Document60 pagesThe Perception of Luxury Cars MA Thesis 25 03Quaxi1954No ratings yet
- Gigabyte Ga b85m Ds3h A r10 PDFDocument30 pagesGigabyte Ga b85m Ds3h A r10 PDFMartha Lorena TijerinoNo ratings yet
- The Handmaid's TaleDocument40 pagesThe Handmaid's Taleleher shahNo ratings yet
- 全新全真题库一 PDFDocument36 pages全新全真题库一 PDFTzarlene100% (1)
- Fellows (Antiques)Document90 pagesFellows (Antiques)messapos100% (1)
- Random Questions From Various IIM InterviewsDocument4 pagesRandom Questions From Various IIM InterviewsPrachi GuptaNo ratings yet
- All Nobel Prizes in LiteratureDocument16 pagesAll Nobel Prizes in LiteratureMohsin IftikharNo ratings yet
- Swiss Army Triplet 1Document2 pagesSwiss Army Triplet 1johnpwayNo ratings yet
- Gold Loan Application FormDocument7 pagesGold Loan Application FormMahesh PittalaNo ratings yet
- HAF350A User ManualDocument14 pagesHAF350A User ManualUEENo ratings yet
- MCFKTP G3 S2 SC Number Pattern PuzzlesDocument5 pagesMCFKTP G3 S2 SC Number Pattern PuzzlesEric GoNo ratings yet
- Using Your Digital Assets On Q-GlobalDocument3 pagesUsing Your Digital Assets On Q-GlobalRemik BuczekNo ratings yet
- PID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDocument7 pagesPID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDenisNo ratings yet
- Derivation Bragg's Snell Law PDFDocument4 pagesDerivation Bragg's Snell Law PDFVaswati BiswasNo ratings yet
- CLT Apllications NewestDocument49 pagesCLT Apllications NewestMackBrideNo ratings yet
- Lesson 1 Concepts About Educational TechnologyDocument17 pagesLesson 1 Concepts About Educational TechnologyMarvin ContigaNo ratings yet
- Off Grid Solar Hybrid Inverter Operate Without Battery: HY VMII SeriesDocument1 pageOff Grid Solar Hybrid Inverter Operate Without Battery: HY VMII SeriesFadi Ramadan100% (1)
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- The Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsFrom EverandThe Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsNo ratings yet
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyFrom EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Advanced Computer-Aided Fixture DesignFrom EverandAdvanced Computer-Aided Fixture DesignRating: 5 out of 5 stars5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansFrom EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansRating: 4 out of 5 stars4/5 (8)
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersFrom EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersRating: 4 out of 5 stars4/5 (13)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsFrom EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNo ratings yet