You might also like
- Kim Et Al. - 2003 - Finite-Element Analysis of Brushless DC Motor Considering Freewheeling Diodes and DC Link Voltage RippleDocument3 pagesKim Et Al. - 2003 - Finite-Element Analysis of Brushless DC Motor Considering Freewheeling Diodes and DC Link Voltage RipplemitulNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- Super 30 EM-1 - QBDocument3 pagesSuper 30 EM-1 - QBmr.kaustubh1362No ratings yet
- Note 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsDocument13 pagesNote 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsSapath Narsingh BogatiNo ratings yet
- Dynamic Model of A Permanent Magnet DC Motor: Projects For StudentsDocument8 pagesDynamic Model of A Permanent Magnet DC Motor: Projects For StudentsAlyssonAlmeidaNo ratings yet
- Lab 3abDocument16 pagesLab 3abLiaqat AliNo ratings yet
- PSD Subjective II Sem 2016-17Document7 pagesPSD Subjective II Sem 2016-17Saravanan T YNo ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- نجيبDocument10 pagesنجيبMalik ZaidNo ratings yet
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document4 pagesIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedNo ratings yet
- Homwork May DienDocument2 pagesHomwork May DienBk DecNo ratings yet
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- EEE-2302 Sessional Sheet - UpdatedDocument13 pagesEEE-2302 Sessional Sheet - UpdatedAsia AlamNo ratings yet
- L-35 (SM) (Ia&c) ( (Ee) Nptel)Document15 pagesL-35 (SM) (Ia&c) ( (Ee) Nptel)Mahua ChandaNo ratings yet
- Exam MachineDocument1 pageExam Machineal_badwiNo ratings yet
- Cne SeqDocument15 pagesCne SeqMayur GedamNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC MotorjpmacabascoNo ratings yet
- Em 9Document4 pagesEm 9Masud RanaNo ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- EF 2 - Assignment # 3 - DC Motor RealDocument4 pagesEF 2 - Assignment # 3 - DC Motor RealWakwkaka JssjaaNo ratings yet
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDocument11 pagesMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoNo ratings yet
- Speed Control For Brushless DC MotorsDocument50 pagesSpeed Control For Brushless DC MotorsMiladShahabiNo ratings yet
- EI6402 Electrical Machines Question BankDocument19 pagesEI6402 Electrical Machines Question BankAyyar KandasamyNo ratings yet
- Speed Control of Brushless DC Motor With DSP Controller Using MatlabDocument6 pagesSpeed Control of Brushless DC Motor With DSP Controller Using MatlabramjiNo ratings yet
- DC MotorDocument27 pagesDC MotorAnonymous AFFiZn100% (2)
- Cycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorDocument4 pagesCycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorVIJAY KUMARNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- Analysis of Thyristor Controlled Induction Motors Based VVCFDocument4 pagesAnalysis of Thyristor Controlled Induction Motors Based VVCFDipti NagareNo ratings yet
- Fourth Semester B.Tech. Degree Examination, December 2009 (2003 Scheme) Branch: Mechanical 03.405: Electrical Technology (Mu)Document2 pagesFourth Semester B.Tech. Degree Examination, December 2009 (2003 Scheme) Branch: Mechanical 03.405: Electrical Technology (Mu)Anita GloriaNo ratings yet
- GP FileDocument14 pagesGP FileVikri RahmatNo ratings yet
- Electric MachineDocument24 pagesElectric Machinemakram.22en498No ratings yet
- 6 em 1Document8 pages6 em 129viswa12No ratings yet
- 138152101-Mt-Machine Modelling and AnalysisDocument2 pages138152101-Mt-Machine Modelling and AnalysisPalaparthy Venkata MaheshNo ratings yet
- Experimental and Simulation StudyDocument10 pagesExperimental and Simulation Studyمحمد عامرNo ratings yet
- 3.chapter Three-Starting System 1Document21 pages3.chapter Three-Starting System 1Ahmed M MerzaNo ratings yet
- Part - A Answer All The Questions: - (10x2 20)Document3 pagesPart - A Answer All The Questions: - (10x2 20)sasidaranNo ratings yet
- Ijresm V2 I2 192Document3 pagesIjresm V2 I2 192Nguyễn Hải ĐăngNo ratings yet
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- High Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerDocument16 pagesHigh Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerMohammed AltamimyNo ratings yet
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்No ratings yet
- ELE3114 Tutorial April 2022Document6 pagesELE3114 Tutorial April 2022Sahiil MauriceNo ratings yet
- DC Motor - Mesin Listrik LanjutDocument60 pagesDC Motor - Mesin Listrik LanjutMuhammad Fajar PrakasaNo ratings yet
- Electrical EnggDocument17 pagesElectrical Enggtkseneee0% (1)
- 8I23 IJAET0723733 v7 Iss5 1426 1433Document8 pages8I23 IJAET0723733 v7 Iss5 1426 1433Anonymous wnHOSM8zNo ratings yet
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- The Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Document2 pagesThe Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Sanjaya SrinathNo ratings yet
- Electrical Machines Lab March 16 UpdateDocument53 pagesElectrical Machines Lab March 16 Updatepeter vanderNo ratings yet
- Modeling and Simulation of BLDC Motor Using Soft Computing TechniquesDocument5 pagesModeling and Simulation of BLDC Motor Using Soft Computing TechniquesJulián Peláez RestrepoNo ratings yet
- Simulation Study On Direct Torque Control of Induction Motor Using Neural NetworkDocument5 pagesSimulation Study On Direct Torque Control of Induction Motor Using Neural NetworkPraful YadavNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationFrom EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Ex Chapter2Document3 pagesEx Chapter2Hoang Dung SonNo ratings yet
- Chapter 3: Introduction Ga: I. ObjectiveDocument8 pagesChapter 3: Introduction Ga: I. ObjectiveHoang Dung SonNo ratings yet
- Class Assignment 1 PLCDocument1 pageClass Assignment 1 PLCHoang Dung SonNo ratings yet
- Melservo mrj2s A PDFDocument385 pagesMelservo mrj2s A PDFrfelipeNo ratings yet
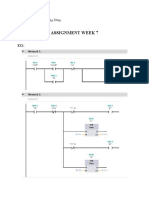
- Assignment Week 7Document5 pagesAssignment Week 7Hoang Dung SonNo ratings yet
- Chapter 2Document7 pagesChapter 2Hoang Dung SonNo ratings yet
- Chapter 1Document9 pagesChapter 1Hoang Dung SonNo ratings yet
- Chapter 3 - FETDocument24 pagesChapter 3 - FETHoang Dung SonNo ratings yet
- The Pid Controller Design Using Genetic Algorithm: University of Southern Queensland Faculty of Engineering and SurveyingDocument100 pagesThe Pid Controller Design Using Genetic Algorithm: University of Southern Queensland Faculty of Engineering and SurveyingHoang Dung SonNo ratings yet
- Midterm Report Group 4Document91 pagesMidterm Report Group 4Hoang Dung SonNo ratings yet
- Edit Lab 1 - Logic Gates and Combinational LogicDocument18 pagesEdit Lab 1 - Logic Gates and Combinational LogicHoang Dung SonNo ratings yet
- Lab 3 - Johnson Counter and Ring CounterDocument15 pagesLab 3 - Johnson Counter and Ring CounterHoang Dung SonNo ratings yet
- Chapter 2 - Bipolar Junction TransistorsDocument70 pagesChapter 2 - Bipolar Junction TransistorsHoang Dung SonNo ratings yet
- Chapter 1 - Diodes and ApplicationsDocument72 pagesChapter 1 - Diodes and ApplicationsHoang Dung SonNo ratings yet
- Agenda: - What's A Microcontroller?Document38 pagesAgenda: - What's A Microcontroller?Hoang Dung SonNo ratings yet
- C1!7!2010 English VersionDocument37 pagesC1!7!2010 English VersionHoang Dung SonNo ratings yet
- Chapter 3 - English VersionDocument22 pagesChapter 3 - English VersionHoang Dung SonNo ratings yet
- C1!7!2010 English VersionDocument37 pagesC1!7!2010 English VersionHoang Dung SonNo ratings yet
- Lecture #1 Introduction To MCU SystemsDocument13 pagesLecture #1 Introduction To MCU SystemsHoang Dung SonNo ratings yet
- Chapter 2 - English VersionDocument34 pagesChapter 2 - English VersionHoang Dung SonNo ratings yet
- C2 - EcoTech Assessment in PDS Design 1Document25 pagesC2 - EcoTech Assessment in PDS Design 1Hoang Dung SonNo ratings yet
- C 3 - Power Demand Assessment and IdentificationDocument78 pagesC 3 - Power Demand Assessment and IdentificationHoang Dung SonNo ratings yet
- C1!7!2010 English VersionDocument37 pagesC1!7!2010 English VersionHoang Dung SonNo ratings yet
- C1!7!2010 English VersionDocument37 pagesC1!7!2010 English VersionHoang Dung SonNo ratings yet
- C1!7!2010 English VersionDocument37 pagesC1!7!2010 English VersionHoang Dung SonNo ratings yet
- Grundfos UPA 120 HOME BOOSTER PDFDocument17 pagesGrundfos UPA 120 HOME BOOSTER PDFJuan Carlos Pulido100% (1)
- DEE - 310 - NotesDocument41 pagesDEE - 310 - NotesAlfred K ChilufyaNo ratings yet
- Ebm Papst r3g400 As12 03Document32 pagesEbm Papst r3g400 As12 03bla45678No ratings yet
- Motor Current Signal AnalysisDocument13 pagesMotor Current Signal Analysissureshnfcl100% (1)
- Robotic ArmDocument25 pagesRobotic Armbhawak pokhrel100% (2)
- Alternadores LEROY SOMER Instalacion y Mantenimiento PDFDocument22 pagesAlternadores LEROY SOMER Instalacion y Mantenimiento PDFJesusNo ratings yet
- Super Efficient motors-IEEE PaperDocument6 pagesSuper Efficient motors-IEEE Paperarunw110No ratings yet
- ALTERNATOR MaintenanceDocument1 pageALTERNATOR MaintenanceOmar SelamiNo ratings yet
- Synchronous Machines: ENGNG 2024 Electrical EngineeringDocument25 pagesSynchronous Machines: ENGNG 2024 Electrical Engineeringpham van duNo ratings yet
- REGAUGINGDocument5 pagesREGAUGINGaardsnailNo ratings yet
- An Introduction To AC Induction Motor Control Using dsPIC30F PDFDocument20 pagesAn Introduction To AC Induction Motor Control Using dsPIC30F PDFJavier RuizNo ratings yet
- 27 - 279598 - LP03044-0, LP030345-0, LP030419-0 Generator Service ManualDocument15 pages27 - 279598 - LP03044-0, LP030345-0, LP030419-0 Generator Service ManualBigDon1955No ratings yet
- CH 5Document52 pagesCH 5phúc nguyễnNo ratings yet
- Dfig Knowledge Sharing FinalDocument65 pagesDfig Knowledge Sharing Finalapoorva mensinkaiNo ratings yet
- Howard JohnsonDocument31 pagesHoward JohnsonRaghavendra MB100% (1)
- Power Electronics 2 Eletrical DrivesDocument123 pagesPower Electronics 2 Eletrical DrivesNaga Ananth100% (2)
- Research Proposal: Vibration Based Condition Monitoring of Elevator Using in Various IndustriesDocument16 pagesResearch Proposal: Vibration Based Condition Monitoring of Elevator Using in Various IndustriesParesh MishraNo ratings yet
- UNIT 2 MechatronicsDocument35 pagesUNIT 2 MechatronicsMuthuvel M91% (11)
- Stability Slide 2Document46 pagesStability Slide 2iriseugeneNo ratings yet
- Design, Modeling and Simulation of An PDFDocument11 pagesDesign, Modeling and Simulation of An PDFBook4AllNo ratings yet
- Switched Reluctance MotorDocument52 pagesSwitched Reluctance Motorkoppulabro75% (8)
- Hermle Z-206A Small Centrifuge - Service Manual PDFDocument25 pagesHermle Z-206A Small Centrifuge - Service Manual PDFelectricistNo ratings yet
- Energy Transfer Magneto: - Hoyt MckagenDocument3 pagesEnergy Transfer Magneto: - Hoyt Mckagenrk-rexNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- Tutorial 6 - Induction MotorDocument2 pagesTutorial 6 - Induction MotorMohdFirdausNo ratings yet
- Self-Excited Induction Generator With Regulated DC Voltage Scheme For Wind Power ApplicationsDocument7 pagesSelf-Excited Induction Generator With Regulated DC Voltage Scheme For Wind Power ApplicationsJitendraNo ratings yet
- Electric Machines - Principles, Applications, and Control Schematics 2nd EditionDocument642 pagesElectric Machines - Principles, Applications, and Control Schematics 2nd EditionMirza MehanovićNo ratings yet
- Rme April 2019 Exam 4 Key PDFDocument8 pagesRme April 2019 Exam 4 Key PDFJevan CalaqueNo ratings yet
- Torque-DTrends May 2008Document14 pagesTorque-DTrends May 2008tooocooolNo ratings yet
- 5-50t Electric Hook Overhead CraneDocument28 pages5-50t Electric Hook Overhead Cranemohamed100% (1)