You might also like
- Interfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitectureDocument31 pagesInterfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitecturetinhtrilacNo ratings yet
- Bus architecture and components overviewDocument186 pagesBus architecture and components overviewSabrina JohnsonNo ratings yet
- Embedded Computing Platform DesignDocument44 pagesEmbedded Computing Platform DesignSatish KumarNo ratings yet
- Lecture#4 - Top Level View of Computer Function and InterconnectionDocument67 pagesLecture#4 - Top Level View of Computer Function and InterconnectionmuusdsdNo ratings yet
- ARM Cortex Processors: A Guide to Cortex-M3 ArchitectureDocument49 pagesARM Cortex Processors: A Guide to Cortex-M3 ArchitectureJyothi B.R.No ratings yet
- Microprocessor & Computer Architecture (Μpca) : Unit 4: Usb, Pci, Scsi,Amba And Asb Bus ArchitectureDocument12 pagesMicroprocessor & Computer Architecture (Μpca) : Unit 4: Usb, Pci, Scsi,Amba And Asb Bus ArchitecturePranathi PraveenNo ratings yet
- Computer Interconnection and Bus StructuresDocument37 pagesComputer Interconnection and Bus StructuresUs ManNo ratings yet
- Computer Organization & Architecture Lecture #15 A View of Computer Function and Interconnection Interconnections StructuresDocument12 pagesComputer Organization & Architecture Lecture #15 A View of Computer Function and Interconnection Interconnections Structuresavdheshg_1No ratings yet
- 04 BusDocument23 pages04 BusAnonymous uUFY09No ratings yet
- Unit - III - Interfacing: Anusha.K Ap, SiteDocument26 pagesUnit - III - Interfacing: Anusha.K Ap, SiterajgantNo ratings yet
- Bus InterconnectionDocument31 pagesBus InterconnectionAnonymous A72zb61100% (1)
- Group 29Document5 pagesGroup 29emanueldakho3No ratings yet
- 9 Bus ArchitectureDocument52 pages9 Bus Architecturesunny567No ratings yet
- Computer Organization and ArchitectureDocument31 pagesComputer Organization and Architecture-AkhilGannamrajuNo ratings yet
- Io BusesDocument56 pagesIo Buseslalokew375No ratings yet
- Bus Architecture ExplainedDocument14 pagesBus Architecture ExplainedAyushi SinghNo ratings yet
- CPU Architecture: Control Unit (CU)Document10 pagesCPU Architecture: Control Unit (CU)i study100% (1)
- Paper - History of Different Buses in A PCDocument20 pagesPaper - History of Different Buses in A PCammad ahmadNo ratings yet
- Computer Buses: What Is A Bus?Document14 pagesComputer Buses: What Is A Bus?masumiNo ratings yet
- BUS InterconnectionDocument27 pagesBUS InterconnectionDEEPIKA PAVUNDOSS 20BEC0285No ratings yet
- Direct Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareDocument15 pagesDirect Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareAshutosh KumarNo ratings yet
- WINSEM2021-22 ECE3004 TH VL2021220501593 Reference Material I 10-01-2022 LECTURE 3-Interconnection of Components-Simple Bus InterconnectDocument23 pagesWINSEM2021-22 ECE3004 TH VL2021220501593 Reference Material I 10-01-2022 LECTURE 3-Interconnection of Components-Simple Bus InterconnectDarsh GuptaNo ratings yet
- Multiple Interrupts and Buses StructureDocument17 pagesMultiple Interrupts and Buses Structureapi-3801329100% (2)
- Bus StructureDocument160 pagesBus Structurexperiac100% (2)
- Computer Organization and ArchitectureDocument25 pagesComputer Organization and ArchitectureNeel RavalNo ratings yet
- Unit-5: Types of Buses in Computer ArchitectureDocument19 pagesUnit-5: Types of Buses in Computer ArchitectureEphrage GurureNo ratings yet
- Ch02 - System InterconnectionDocument29 pagesCh02 - System InterconnectionViet Quang VoNo ratings yet
- BusesDocument19 pagesBusesprasath67No ratings yet
- Paper - History of Different Buses in A PCDocument21 pagesPaper - History of Different Buses in A PCammad ahmadNo ratings yet
- Bus Standards and TechnologiesDocument31 pagesBus Standards and TechnologiesDarmoni LaishramNo ratings yet
- Arm Ahb For McusDocument7 pagesArm Ahb For McusBharathwajan ParthasarathyNo ratings yet
- ISA BUS RaporuDocument10 pagesISA BUS Raporuravi02431No ratings yet
- Coa CT 1 QBDocument43 pagesCoa CT 1 QBNilesh bibhutiNo ratings yet
- Computer Interfacinglecture3Document20 pagesComputer Interfacinglecture3mohamed faragNo ratings yet
- Block Interconnection: Today's Topics Divide Into TwoDocument9 pagesBlock Interconnection: Today's Topics Divide Into TwoMohammad Seemab AslamNo ratings yet
- Computer Architecture & Organization UNIT 1Document17 pagesComputer Architecture & Organization UNIT 1Nihal GuptaNo ratings yet
- CHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationDocument17 pagesCHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationPrevenaManiamNo ratings yet
- Digital Signal Processing ECE301: Topic-Design of Microprocessor Based SystemsDocument3 pagesDigital Signal Processing ECE301: Topic-Design of Microprocessor Based SystemsGaurav SharmaNo ratings yet
- Lecture 1: Introduction To ARM Based Embedded SystemsDocument24 pagesLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaNo ratings yet
- 2- A top-level view of computer function and interconnectionDocument39 pages2- A top-level view of computer function and interconnectionAliaa TarekNo ratings yet
- The Cpu: Central Processing UnitDocument26 pagesThe Cpu: Central Processing Unitjim_finn_1No ratings yet
- William Stallings Computer Organization and Architecture 7 Edition System BusesDocument50 pagesWilliam Stallings Computer Organization and Architecture 7 Edition System BusesRubeshan ShanNo ratings yet
- Bus StructureDocument160 pagesBus StructureRohit SaxenaNo ratings yet
- Coa Unit 1Document28 pagesCoa Unit 1vivek kumarNo ratings yet
- 212 Chapter06Document50 pages212 Chapter06HAU LE DUCNo ratings yet
- Chapter ModifedDocument107 pagesChapter ModifedgnanaNo ratings yet
- Introduction To The I/O Buses: Functions of Buses in ComputersDocument12 pagesIntroduction To The I/O Buses: Functions of Buses in ComputersrubinderNo ratings yet
- INTERFACING MEMORY AND I/O DEVICESDocument12 pagesINTERFACING MEMORY AND I/O DEVICESRemmy SilverNo ratings yet
- Computer ArchitectureDocument15 pagesComputer ArchitectureAbdul KapiteniNo ratings yet
- Bus ArchitectureDocument15 pagesBus ArchitectureNitin KumarNo ratings yet
- 4Document12 pages4Abdulaziz TilahunNo ratings yet
- PCI BUS SPEEDDocument41 pagesPCI BUS SPEEDNizamuddin Chapatle100% (1)
- CH 03 p2 BusStructureDocument37 pagesCH 03 p2 BusStructureAnanda Haykel IskandarNo ratings yet
- Pci BusDocument17 pagesPci BusA TNo ratings yet
- LectureSeries3 - BusesDocument19 pagesLectureSeries3 - BusesLamar ArnoldNo ratings yet
- Overview of Router Architecture and ComponentsDocument17 pagesOverview of Router Architecture and Components1975jmr 侯壮马No ratings yet
- Unit 15 Bus StructureDocument32 pagesUnit 15 Bus StructureRennie KawanguNo ratings yet
- 03-Bus-Bus Sistem (5-6)Document28 pages03-Bus-Bus Sistem (5-6)Viranata DarmaNo ratings yet
- My Lecture 2Document14 pagesMy Lecture 2Kashif KhanNo ratings yet
- Lecture MicroprocessorDocument18 pagesLecture MicroprocessorJohn wickNo ratings yet
- Lecture Microprocessor 3 - 4Document15 pagesLecture Microprocessor 3 - 4John wickNo ratings yet
- Lecture Microprocessor 1 - 2Document20 pagesLecture Microprocessor 1 - 2John wickNo ratings yet
- Experiment # 4Document5 pagesExperiment # 4John wickNo ratings yet
- Engineering Electromagnetics: Gauss' Law and DivergenceDocument33 pagesEngineering Electromagnetics: Gauss' Law and DivergenceJohn wickNo ratings yet
- AST Ascentia 200GXM/280M User GuideDocument85 pagesAST Ascentia 200GXM/280M User GuidemujmdNo ratings yet
- Experiment File3333Document38 pagesExperiment File3333teekamNo ratings yet
- SIP4 Timer Gate - CFCDocument5 pagesSIP4 Timer Gate - CFCEMD NSPCLNo ratings yet
- Airbag FsDocument2 pagesAirbag FsSanja StošićNo ratings yet
- QK3B UMA block diagramDocument33 pagesQK3B UMA block diagramNuno CarvalhoNo ratings yet
- Design and ASIC Implementation of Ethernet Switch For Network ApplicationDocument5 pagesDesign and ASIC Implementation of Ethernet Switch For Network Applicationnmrp84No ratings yet
- Embedded System of Automatic Level Control Based On FPGA: August 2010Document6 pagesEmbedded System of Automatic Level Control Based On FPGA: August 2010Mạnh TuấnNo ratings yet
- Dynamic Scheduling with ScoreboardingDocument10 pagesDynamic Scheduling with ScoreboardingArvind Krishnaa JNo ratings yet
- Lect28 2dff TFF JKFFDocument9 pagesLect28 2dff TFF JKFFpurwant10168No ratings yet
- Design and Implementation of a Unified BCD/Binary Adder/SubtractorDocument19 pagesDesign and Implementation of a Unified BCD/Binary Adder/SubtractorAbdullahJavedNo ratings yet
- Sequential Circuits: Cpe 443/L Advanced Logic CircuitsDocument35 pagesSequential Circuits: Cpe 443/L Advanced Logic CircuitsKent Genzen Corpus100% (1)
- Compal La 3281p UnlockedDocument47 pagesCompal La 3281p UnlockedHoracio AlvarezNo ratings yet
- 02 ARM Processor FundamentalsDocument65 pages02 ARM Processor Fundamentalsbengaltiger100% (2)
- VGA Controller Implementation PDFDocument36 pagesVGA Controller Implementation PDFbbshir0No ratings yet
- DP Sound Conexant 15035 DriversDocument222 pagesDP Sound Conexant 15035 DriversRajesh1146No ratings yet
- Nematron ePC215WMT: 21.5" Widescreen, Low-Cost, Fanless, Panel Mount Industrial ComputerDocument2 pagesNematron ePC215WMT: 21.5" Widescreen, Low-Cost, Fanless, Panel Mount Industrial ComputerjesusortegavNo ratings yet
- BMS CSE Lab ManualDocument84 pagesBMS CSE Lab ManualRuthwik S GowdaNo ratings yet
- E560 Cmu05 DSDocument3 pagesE560 Cmu05 DSSalvador FayssalNo ratings yet
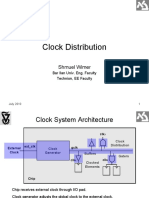
- Clock Distribution: Shmuel WimerDocument75 pagesClock Distribution: Shmuel Wimersenthilkumar100% (1)
- JNTU Hyderabad: B.Tech. II Year I & II Semester Regular/Supplementary Examinations Time Table 2011-2012Document34 pagesJNTU Hyderabad: B.Tech. II Year I & II Semester Regular/Supplementary Examinations Time Table 2011-2012MahabubnagarNo ratings yet
- MiniprojectsynopsisDocument4 pagesMiniprojectsynopsishelloNo ratings yet
- 16 Bit Multiplication 8051Document4 pages16 Bit Multiplication 8051Uday A Korat100% (5)
- Compaq Slt286 ManualDocument89 pagesCompaq Slt286 Manualalfe20001120No ratings yet
- The Highest Mountain on Earth - Mount EverestDocument4 pagesThe Highest Mountain on Earth - Mount EverestIhsanNurulHabibNo ratings yet
- COA LAb File-ShubhiDocument28 pagesCOA LAb File-ShubhiKrishan Kant ShuklaNo ratings yet
- Generating Optimizing and Verifying HDL Code With Matlab and SimulinkDocument46 pagesGenerating Optimizing and Verifying HDL Code With Matlab and Simulinkkpkarthi80No ratings yet
- DH55HC ProductGuide02 English PDFDocument82 pagesDH55HC ProductGuide02 English PDFricardogtNo ratings yet
- Accessing Real Time Clock Registers and NMI Enable BitDocument22 pagesAccessing Real Time Clock Registers and NMI Enable Bitdrhollywood2001No ratings yet
- Microprocessors and Digital ICs For Control of Power Electronics and DrivesDocument79 pagesMicroprocessors and Digital ICs For Control of Power Electronics and DrivesTianmingyuNo ratings yet