You might also like
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Lec - 3-4 - Transfer Function and Laplace TransformDocument54 pagesLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiNo ratings yet
- System ModelingDocument110 pagesSystem ModelingYouness AITOUNYNo ratings yet
- Sistemas de Comunicaciones: Modulacion AngularDocument29 pagesSistemas de Comunicaciones: Modulacion AngularCajamarca AlexNo ratings yet
- Assignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Document2 pagesAssignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Shahzaib NadeemNo ratings yet
- 04S ME304 MT1 SolutionsDocument5 pages04S ME304 MT1 SolutionsAnonymous LwNSginNo ratings yet
- Chapter 3mDocument28 pagesChapter 3mMustafaNo ratings yet
- Introduction To Laplace TransformsDocument47 pagesIntroduction To Laplace TransformsTalha MazharNo ratings yet
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjNo ratings yet
- CH 4Document26 pagesCH 4yodakurnia wijayaNo ratings yet
- Analog and Digital I/Q ModulationDocument16 pagesAnalog and Digital I/Q ModulationRui CarvalhoNo ratings yet
- Module 2 Laplace TransformDocument13 pagesModule 2 Laplace TransformJohnnette AggabaoNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Laplace Circuit AnalysisDocument41 pagesLaplace Circuit AnalysishibaNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Laplace Transform: General FormulasDocument4 pagesLaplace Transform: General FormulasВу Суан ЛамNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Lesson No. 3 System ModellingDocument44 pagesLesson No. 3 System ModellingJorge BautistaNo ratings yet
- Assignment#2-EE 361/chapter 2: T T T T TDocument2 pagesAssignment#2-EE 361/chapter 2: T T T T TIbrahim SiddiquiNo ratings yet
- Laplace P01Document7 pagesLaplace P01ziya nur izmitNo ratings yet
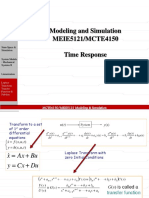
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Automatic ControlDocument16 pagesAutomatic ControlSayed NagyNo ratings yet
- La PlaceDocument7 pagesLa Placenani233100% (1)
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Control Theory Course: Chapter 2: Mathematical Models of Control SystemDocument70 pagesControl Theory Course: Chapter 2: Mathematical Models of Control SystemTân NguyễnNo ratings yet
- Math4 170513085146Document47 pagesMath4 170513085146jucar fernandezNo ratings yet
- Continuous Time Convolution: Author Phani Swathi Chitta Mentor Prof. Saravanan VijayakumaranDocument28 pagesContinuous Time Convolution: Author Phani Swathi Chitta Mentor Prof. Saravanan VijayakumaranmohanNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Bookal RohanNo ratings yet
- Laplace TransformDocument67 pagesLaplace TransformSaqlain DNo ratings yet
- Combinational Logic: Combinational Logic: Analysis and Design Analysis and DesignDocument45 pagesCombinational Logic: Combinational Logic: Analysis and Design Analysis and Designsinoisnoir6644No ratings yet
- Circuit Analysis Using Laplace TransformDocument94 pagesCircuit Analysis Using Laplace TransformSilvers RayleighNo ratings yet
- M3 Unit 2 - MCQDocument5 pagesM3 Unit 2 - MCQA-z knowledgeNo ratings yet
- Fourier Series Expansion of Periodic Signal: (With Period of T)Document45 pagesFourier Series Expansion of Periodic Signal: (With Period of T)Khaaliq DeJanNo ratings yet
- Chapter 4Document30 pagesChapter 4Farooq AhmadNo ratings yet
- 33laplace Transforms and Non Standard Functions PDFDocument4 pages33laplace Transforms and Non Standard Functions PDFkinfeNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Tutorial 2: System Dynamics and Process StructuresDocument4 pagesTutorial 2: System Dynamics and Process StructuresggleichgesinntenNo ratings yet
- Lecture 2 - 4 - Second Order ResponsesDocument27 pagesLecture 2 - 4 - Second Order ResponsesLiyana HalimNo ratings yet
- MP Lecture - 4: Control Unit DesignDocument33 pagesMP Lecture - 4: Control Unit DesignHossain Mohammad MahbubNo ratings yet
- Assignment 3Document4 pagesAssignment 3AnasNo ratings yet
- Assignment 3aDocument4 pagesAssignment 3aShahzaib NadeemNo ratings yet
- Convenient Representation of A Linear, Dynamic Model. - A Transfer Function (TF) Relates One Input and One OutputDocument26 pagesConvenient Representation of A Linear, Dynamic Model. - A Transfer Function (TF) Relates One Input and One Outputmeseret sisayNo ratings yet
- EE207 Problem Set 3 IIT ROPARDocument12 pagesEE207 Problem Set 3 IIT ROPARsumithasreekumar5No ratings yet
- Dada La Señal No Periódica G (T)Document27 pagesDada La Señal No Periódica G (T)Marko Chambi ColqueNo ratings yet
- L03 FourierDocument60 pagesL03 Fourierفراس فراس فراسNo ratings yet
- CH 04Document26 pagesCH 04pkabandaNo ratings yet
- Laplace Transform Transfer Function: Prepared By: Engr. C. DullasDocument28 pagesLaplace Transform Transfer Function: Prepared By: Engr. C. DullasJesse Jon FerolinoNo ratings yet
- Lecture 3 First Order SystemsDocument26 pagesLecture 3 First Order SystemsZena wNo ratings yet
- Laplace Transform Notes HindustanDocument3 pagesLaplace Transform Notes HindustanAKSHANSH MATHURNo ratings yet
- Flip FlopsDocument35 pagesFlip FlopsGaurav0% (1)
- Assignment-EE 361/chapter 3: Yt T GT TDocument4 pagesAssignment-EE 361/chapter 3: Yt T GT TIbrahim SiddiquiNo ratings yet
- Exam in Digital Communications, EITG05: October 26, 2017Document7 pagesExam in Digital Communications, EITG05: October 26, 2017Abdelhakim KhlifiNo ratings yet
- Lecture 20 Root Locus Introduction and DefinitionDocument21 pagesLecture 20 Root Locus Introduction and DefinitionHamza KhanNo ratings yet
- Tutorial 2 SolutionsDocument32 pagesTutorial 2 SolutionsSai AnoopNo ratings yet
- Blake Problem ComputationDocument42 pagesBlake Problem ComputationAnonymous pS4LT2GJUSNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Lecture 2 - 3 - First Order ResponsesDocument31 pagesLecture 2 - 3 - First Order ResponsesLiyana HalimNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Experiment 3 Scoring TestDocument5 pagesExperiment 3 Scoring TestLiyana HalimNo ratings yet
- Malaysia Food RegulationDocument168 pagesMalaysia Food RegulationBoh TuansimNo ratings yet
- Experiment 2 Difference TestsDocument5 pagesExperiment 2 Difference TestsLiyana HalimNo ratings yet
- OBJECTIVEDocument2 pagesOBJECTIVELiyana HalimNo ratings yet
- Topic 4 - Intellectual Property 1Document10 pagesTopic 4 - Intellectual Property 1Liyana HalimNo ratings yet
- Topic 9 - NetworkingDocument12 pagesTopic 9 - NetworkingLiyana HalimNo ratings yet
- Topic 8 - Legal Aspects and Ethics1Document11 pagesTopic 8 - Legal Aspects and Ethics1Liyana HalimNo ratings yet
- Manufacturing of Mayonnaise With Pea Pod Powder As A Functional IngredientDocument12 pagesManufacturing of Mayonnaise With Pea Pod Powder As A Functional IngredientLiyana HalimNo ratings yet
- C2 - 2 - Laplace TransformsDocument32 pagesC2 - 2 - Laplace TransformsLiyana HalimNo ratings yet
- C2 - 1 - Laplace TransformsDocument36 pagesC2 - 1 - Laplace TransformsLiyana HalimNo ratings yet
- Ijfs 14427Document22 pagesIjfs 14427Liyana HalimNo ratings yet
- US2940860Document2 pagesUS2940860Liyana HalimNo ratings yet
- Control Valve CV3Document5 pagesControl Valve CV3Liyana HalimNo ratings yet
- Control Valve CV2Document8 pagesControl Valve CV2Liyana HalimNo ratings yet
- Lecture 2 - 4 - Second Order ResponsesDocument27 pagesLecture 2 - 4 - Second Order ResponsesLiyana HalimNo ratings yet
- CH 2Document37 pagesCH 2Liyana HalimNo ratings yet
- Lecture 2 - 3 - First Order ResponsesDocument31 pagesLecture 2 - 3 - First Order ResponsesLiyana HalimNo ratings yet
- Lecture 3B Intro InstrumentationDocument82 pagesLecture 3B Intro InstrumentationLiyana HalimNo ratings yet
- Control Valve CVDocument20 pagesControl Valve CVLiyana HalimNo ratings yet
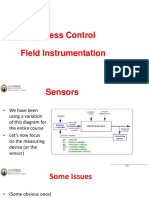
- Lecture 3A - SensorsDocument26 pagesLecture 3A - SensorsLiyana HalimNo ratings yet
- Tutorial 1B Exponents & LogarithmsDocument104 pagesTutorial 1B Exponents & LogarithmsLiyana HalimNo ratings yet
- Lecture 8 Safety - HierarchyDocument44 pagesLecture 8 Safety - HierarchyLiyana HalimNo ratings yet
- Chap 2 - Legal Control CertDocument11 pagesChap 2 - Legal Control CertLeslie WoodsNo ratings yet
- Discussio1.docx MicrobDocument1 pageDiscussio1.docx MicrobLiyana HalimNo ratings yet
- Transforming FA For SDGsDocument136 pagesTransforming FA For SDGsLiyana HalimNo ratings yet
- Tutorial 1 Exponents & LogarithmsDocument4 pagesTutorial 1 Exponents & LogarithmsLiyana HalimNo ratings yet
- Table 1: Triangle Test Panelist ResultDocument3 pagesTable 1: Triangle Test Panelist ResultLiyana HalimNo ratings yet
- Normal Probability TableDocument2 pagesNormal Probability TableLiyana HalimNo ratings yet
- Gas Chromatography: AbbreviationsDocument7 pagesGas Chromatography: AbbreviationsLiyana HalimNo ratings yet
- A Vision System For Surface Roughness Characterization Using The Gray Level Co-Occurrence MatrixDocument12 pagesA Vision System For Surface Roughness Characterization Using The Gray Level Co-Occurrence MatrixPraveen KumarNo ratings yet
- Plant Vs Filter by Diana WalstadDocument6 pagesPlant Vs Filter by Diana WalstadaachuNo ratings yet
- 30 de Thi Hoc Ky 2 Mon Tieng Anh Lop 9 Co Dap An 2023Document64 pages30 de Thi Hoc Ky 2 Mon Tieng Anh Lop 9 Co Dap An 2023Trần MaiNo ratings yet
- Eu Clinical TrialDocument4 pagesEu Clinical TrialAquaNo ratings yet
- CSCU Module 08 Securing Online Transactions PDFDocument29 pagesCSCU Module 08 Securing Online Transactions PDFdkdkaNo ratings yet
- Tso C197Document6 pagesTso C197rdpereirNo ratings yet
- STD Specification For Design and Integration of Fuel Energy Storage F3063Document7 pagesSTD Specification For Design and Integration of Fuel Energy Storage F3063Kobus PretoriusNo ratings yet
- DS SX1280-1-2 V3.0Document143 pagesDS SX1280-1-2 V3.0bkzzNo ratings yet
- Fike ECARO-25 Frequently Asked Questions (FAQ)Document8 pagesFike ECARO-25 Frequently Asked Questions (FAQ)Jubert RaymundoNo ratings yet
- BBO2020Document41 pagesBBO2020qiuNo ratings yet
- Andromeda: Druid 3 Warborn06Document5 pagesAndromeda: Druid 3 Warborn06AlanNo ratings yet
- Teacher'S Individual Plan For Professional Development SCHOOL YEAR 2020-2021Document2 pagesTeacher'S Individual Plan For Professional Development SCHOOL YEAR 2020-2021Diether Mercado Padua100% (8)
- AREMA Shoring GuidelinesDocument25 pagesAREMA Shoring GuidelinesKCHESTER367% (3)
- Whitepaper ITES Industry PotentialDocument6 pagesWhitepaper ITES Industry PotentialsamuraiharryNo ratings yet
- TV Antenna Tower CollapseDocument4 pagesTV Antenna Tower CollapseImdaad ChuubbNo ratings yet
- ERBS UPDATE John Doe ProceedingDocument3 pagesERBS UPDATE John Doe ProceedingtpeppermanNo ratings yet
- Onco Case StudyDocument2 pagesOnco Case StudyAllenNo ratings yet
- Harley Davidson U S Reportedly Uses Risk Sharing Agreements With Its Foreign SubsidiariesDocument1 pageHarley Davidson U S Reportedly Uses Risk Sharing Agreements With Its Foreign Subsidiariestrilocksp SinghNo ratings yet
- Teaching Plan - Math 8 Week 1-8 PDFDocument8 pagesTeaching Plan - Math 8 Week 1-8 PDFRYAN C. ENRIQUEZNo ratings yet
- Game ApiDocument16 pagesGame ApiIsidora Núñez PavezNo ratings yet
- Ajsl DecisionMakingModel4RoRoDocument11 pagesAjsl DecisionMakingModel4RoRolesta putriNo ratings yet
- When I Was A ChildDocument2 pagesWhen I Was A Childapi-636173534No ratings yet
- 24 Inch MonitorDocument10 pages24 Inch MonitorMihir SaveNo ratings yet
- Eureka Math Grade 2 Module 3 Parent Tip Sheet 1Document2 pagesEureka Math Grade 2 Module 3 Parent Tip Sheet 1api-324573119No ratings yet
- 3 A Sanitary Standards Quick Reference GuideDocument98 pages3 A Sanitary Standards Quick Reference GuideLorettaMayNo ratings yet
- Singer 900 Series Service ManualDocument188 pagesSinger 900 Series Service ManualGinny RossNo ratings yet
- EPSS 627: DescriptionDocument2 pagesEPSS 627: DescriptionudayakumartNo ratings yet
- Bloomsbury Fashion Central - Designing Children's WearDocument16 pagesBloomsbury Fashion Central - Designing Children's WearANURAG JOSEPHNo ratings yet
- Technical and Business WritingDocument3 pagesTechnical and Business WritingMuhammad FaisalNo ratings yet
- T10 - PointersDocument3 pagesT10 - PointersGlory of Billy's Empire Jorton KnightNo ratings yet