You might also like
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Brake Components: 2020/12/03 General Information (M0122672-00)Document5 pagesBrake Components: 2020/12/03 General Information (M0122672-00)JACOB MUDONHINo ratings yet
- Circuit Symbols: Wires and Connections Compone NT Circuit Symbol Function of ComponentDocument7 pagesCircuit Symbols: Wires and Connections Compone NT Circuit Symbol Function of ComponentRalph MedinaNo ratings yet
- EE-101 (Unit-5)Document81 pagesEE-101 (Unit-5)Chauhan AyushmaanNo ratings yet
- Hydraulic Tank: 2020/12/09 Location of Components (Hydraulic System) - Hoist (M0111643-01)Document3 pagesHydraulic Tank: 2020/12/09 Location of Components (Hydraulic System) - Hoist (M0111643-01)JACOB MUDONHINo ratings yet
- Week 71Document25 pagesWeek 71Raphael SebucNo ratings yet
- 3 Phase Induction Motor ConstructionDocument25 pages3 Phase Induction Motor ConstructionsunilkumareceNo ratings yet
- Electrical Machines-II Units-III & IV Questions and AnswersDocument4 pagesElectrical Machines-II Units-III & IV Questions and AnswersJoseph Harindranath100% (2)
- P A G E 3 MC Emd-Three Phase Induction MotorDocument9 pagesP A G E 3 MC Emd-Three Phase Induction MotornikunjNo ratings yet
- 777e BNMDocument10 pages777e BNMJACOB MUDONHINo ratings yet
- Synchronous and Slip-Ring Rotor Machines CourseDocument87 pagesSynchronous and Slip-Ring Rotor Machines CourseHaryo Probo100% (1)
- UNIT-III Three Phase & Single Phase Induction MotorsDocument8 pagesUNIT-III Three Phase & Single Phase Induction MotorsRahulRamamoorthyNo ratings yet
- Step by Step Development of Equivalent Circuit of Induction MotorDocument11 pagesStep by Step Development of Equivalent Circuit of Induction MotornandhakumarmeNo ratings yet
- Commissioning and Maintenance MiCOM P125 P126 & P127-P12yEN CMC22Document26 pagesCommissioning and Maintenance MiCOM P125 P126 & P127-P12yEN CMC22dennyyusufNo ratings yet
- J0231 HV TR - FINAL变压器1Document23 pagesJ0231 HV TR - FINAL变压器1SerhiiNo ratings yet
- Chapter 3 Induction Motor PDFDocument26 pagesChapter 3 Induction Motor PDFNeezam Halim50% (2)
- Ind MachinesDocument23 pagesInd MachinesHareesh MadathilNo ratings yet
- Induction MotorsDocument47 pagesInduction MotorsPurushothaman KannanNo ratings yet
- Chapter 4 Chapter 4 Chapter 4 Chapter 4 PDFDocument37 pagesChapter 4 Chapter 4 Chapter 4 Chapter 4 PDFWellin SamboNo ratings yet
- Three Phase Induction MotorsDocument22 pagesThree Phase Induction MotorsSabiha MahbubNo ratings yet
- Bee Exp10Document4 pagesBee Exp10pranaybhandare765No ratings yet
- Three Phase Induction MotorDocument21 pagesThree Phase Induction MotorPrianshu JyosyulaNo ratings yet
- ELE290 Induction Motor GuideDocument21 pagesELE290 Induction Motor GuideHarizx SaufixNo ratings yet
- Unit 3 Three Phase Induction MotorDocument14 pagesUnit 3 Three Phase Induction Motorkrishna Sai Atla VenkataNo ratings yet
- Bee Unit4 Lecture1Document6 pagesBee Unit4 Lecture1rohityaduvanshirrNo ratings yet
- Three Phase Induction MotorDocument89 pagesThree Phase Induction MotorTHE ROCKNo ratings yet
- Chapter Three Three Phase Induction Motors: 3-1 IntroductionDocument10 pagesChapter Three Three Phase Induction Motors: 3-1 IntroductionMohammed Dyhia AliNo ratings yet
- GRP No.1 El-P-MachineryDocument12 pagesGRP No.1 El-P-MachineryYasin OmaryNo ratings yet
- AC Machine Course OutcomesDocument19 pagesAC Machine Course OutcomesFred RotichNo ratings yet
- How Does An Induction Motor WorkDocument7 pagesHow Does An Induction Motor WorkLeandro CamargoNo ratings yet
- Three Phase Induction Motor FundamentalsDocument3 pagesThree Phase Induction Motor FundamentalsDhanashree ParanjapeNo ratings yet
- Motor Current Analysis and Its Applications in Induction Motor Fault DiagnosisDocument21 pagesMotor Current Analysis and Its Applications in Induction Motor Fault DiagnosisEbrahim JozariNo ratings yet
- ELE290 Chapter 6Document21 pagesELE290 Chapter 6imfendiNo ratings yet
- 4 5814692296314062904Document76 pages4 5814692296314062904Dagim KumilachewNo ratings yet
- Notes For Power System 5th SemDocument28 pagesNotes For Power System 5th SemSidhant SharmaNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Em 2 Chapter 3Document51 pagesEm 2 Chapter 3Sudhanshu SinghNo ratings yet
- Original PDFDocument37 pagesOriginal PDFAhmadS.Alosta50% (2)
- Three Phase Induction Motor ExplainedDocument13 pagesThree Phase Induction Motor ExplainedB ANIL KUMARNo ratings yet
- Three-Phase Motor BasicsDocument10 pagesThree-Phase Motor BasicsAtharv BhedaNo ratings yet
- Three-Phase Induction Motor Part-1Document49 pagesThree-Phase Induction Motor Part-1Kazi Newaj FaisalNo ratings yet
- Single PhasingDocument22 pagesSingle PhasingAakarsh Rastogi100% (2)
- MODULE 4 - Induction MachineDocument35 pagesMODULE 4 - Induction MachinedamoskidanielNo ratings yet
- By: Dr. Salah Eldeen GasimDocument31 pagesBy: Dr. Salah Eldeen Gasimomar meroNo ratings yet
- Unit 3 To 5 Induction Motor NotesDocument96 pagesUnit 3 To 5 Induction Motor Notesganesh ganeshNo ratings yet
- Module 6 - Basic Electrical - KtuQbankDocument23 pagesModule 6 - Basic Electrical - KtuQbankThahir TNo ratings yet
- EE313 Class10Document9 pagesEE313 Class10Zahid MarwatNo ratings yet
- Understanding Induction MotorsDocument28 pagesUnderstanding Induction MotorsKimsairng CheaNo ratings yet
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Analysis of Induction MachinesDocument70 pagesAnalysis of Induction MachinesKyambi MutiaNo ratings yet
- Electrical Machines: Unit-4Document53 pagesElectrical Machines: Unit-4MineCraft B-Tech CSNo ratings yet
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- Induction Motor LessonDocument63 pagesInduction Motor Lessonyohannes tesfahaunNo ratings yet
- Electrical Interview GuideDocument9 pagesElectrical Interview GuideKrishnamoorthi VenkatesanNo ratings yet
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- Taken From Course Structure 3 Phase Induction MachinesDocument18 pagesTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodNo ratings yet
- Motors and LoadsDocument24 pagesMotors and Loadsmanukjoy007No ratings yet
- Chapter 7 Induction Machines-EEE301Document96 pagesChapter 7 Induction Machines-EEE301DilekNo ratings yet
- EM 2 Lecture Notes Unit 1 2 3Document103 pagesEM 2 Lecture Notes Unit 1 2 3M ranganNo ratings yet
- Module 3b (Electrical Machines)Document43 pagesModule 3b (Electrical Machines)MohammedNo ratings yet
- Three Phase Induction MotorDocument16 pagesThree Phase Induction MotorPushan Kumar DattaNo ratings yet
- 3-Phase Induction Motor BasicsDocument34 pages3-Phase Induction Motor BasicsMizanur RahmanNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- 777EKLJDocument5 pages777EKLJJACOB MUDONHINo ratings yet
- Esd ModuleDocument131 pagesEsd ModuleNdumiso Moyo100% (1)
- ESD Module2011Document107 pagesESD Module2011Von Valentine MhuteNo ratings yet
- Null 19Document98 pagesNull 19JACOB MUDONHINo ratings yet
- Annual Technical Report RqrmtsDocument5 pagesAnnual Technical Report RqrmtsJACOB MUDONHINo ratings yet
- Brake ECM: 2020/12/03 Location of Electrical Components (M0122672-00)Document15 pagesBrake ECM: 2020/12/03 Location of Electrical Components (M0122672-00)JACOB MUDONHINo ratings yet
- Harare: PolytechnicDocument6 pagesHarare: PolytechnicJACOB MUDONHINo ratings yet
- DC motor starter explainedDocument5 pagesDC motor starter explainedTynoh MusukuNo ratings yet
- SUSPENCIONDocument28 pagesSUSPENCIONDragon Ball superNo ratings yet
- 777e BNHJMKDocument1 page777e BNHJMKJACOB MUDONHINo ratings yet
- Table 1: Illustration 1 g06606975Document2 pagesTable 1: Illustration 1 g06606975JACOB MUDONHINo ratings yet
- 777e BGHFDocument1 page777e BGHFJACOB MUDONHINo ratings yet
- 777e BhuiyjklDocument1 page777e BhuiyjklJACOB MUDONHINo ratings yet
- Operator InputsDocument7 pagesOperator InputsJACOB MUDONHINo ratings yet
- 777e BeenDocument1 page777e BeenJACOB MUDONHINo ratings yet
- Compression StrokeDocument1 pageCompression StrokeJACOB MUDONHINo ratings yet
- Manual Retarder Control (Lever) : NoticeDocument4 pagesManual Retarder Control (Lever) : NoticeJACOB MUDONHINo ratings yet
- PSP-0006F1FB 2022/04/26 08:26:29+02:00 M0122672 © 2022 Caterpillar Inc. Caterpillar: Confidential GreenDocument1 pagePSP-0006F1FB 2022/04/26 08:26:29+02:00 M0122672 © 2022 Caterpillar Inc. Caterpillar: Confidential GreenJACOB MUDONHINo ratings yet
- Engine Over-Speed ProtectionDocument2 pagesEngine Over-Speed ProtectionJACOB MUDONHINo ratings yet
- Connecting Rod PartsDocument1 pageConnecting Rod PartsJACOB MUDONHINo ratings yet
- Engine Business DivisionsDocument1 pageEngine Business DivisionsJACOB MUDONHINo ratings yet
- Connecting RodDocument1 pageConnecting RodJACOB MUDONHINo ratings yet
- Cooling Circuits ContDocument1 pageCooling Circuits ContJACOB MUDONHINo ratings yet
- CompressionDocument1 pageCompressionJACOB MUDONHINo ratings yet
- Combustion ChamberDocument1 pageCombustion ChamberJACOB MUDONHINo ratings yet
- Caterpillar Quarry & Specialty IndustriesDocument1 pageCaterpillar Quarry & Specialty IndustriesJACOB MUDONHINo ratings yet
- Baterias Condensadores PROPIVAR MTDocument34 pagesBaterias Condensadores PROPIVAR MTjjcanoolivaresNo ratings yet
- Important QuestionsDocument2 pagesImportant Questionsramjidr0% (1)
- Blazer 400-800 Service ManualDocument34 pagesBlazer 400-800 Service ManualdaossaNo ratings yet
- Squirrel Cage Induction Motors: 7AAC63-90 7AACC63-100Document8 pagesSquirrel Cage Induction Motors: 7AAC63-90 7AACC63-100Isuru DharmasiriNo ratings yet
- VD 300 InverterDocument162 pagesVD 300 Invertercarlos briceñoNo ratings yet
- Tip 122 127Document9 pagesTip 122 127GGurfinkelNo ratings yet
- MMG 35 PartsDocument68 pagesMMG 35 PartsChris MaytumNo ratings yet
- 8261 ControlPanels EK00 III enDocument2 pages8261 ControlPanels EK00 III enAndy Kong KingNo ratings yet
- EEE 231 CoursecontentDocument3 pagesEEE 231 Coursecontentfakiha11No ratings yet
- PTC19022100601S-LD01 Test ReportDocument103 pagesPTC19022100601S-LD01 Test ReportSumit SinhaNo ratings yet
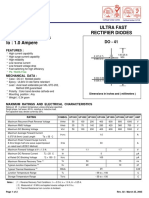
- Ultra-fast rectifier diodes specifications and data sheetDocument2 pagesUltra-fast rectifier diodes specifications and data sheetCastro G. LombanaNo ratings yet
- Condensate Pump Motor 4A: Trip Unit Calibration TestDocument1 pageCondensate Pump Motor 4A: Trip Unit Calibration TestR Jay FranNo ratings yet
- ActuatorsDocument89 pagesActuatorsDavid CalleNo ratings yet
- Section1 - UpdatedDocument136 pagesSection1 - UpdatedPredrag StanićNo ratings yet
- CV - Allapitchai ShadhikDocument5 pagesCV - Allapitchai ShadhikSriram SriramNo ratings yet
- CABT CablesDocument1 pageCABT CablesKristaNo ratings yet
- Bss Ar-133 Active Di BoxDocument2 pagesBss Ar-133 Active Di Boxjohnblue3198No ratings yet
- Course Outline: F/Kurikulum/Folder Rangka Kuliah/10 June 2008Document6 pagesCourse Outline: F/Kurikulum/Folder Rangka Kuliah/10 June 2008izzudinrozNo ratings yet
- PEH A2-A6 Process Controller Serv Man 0740801006Document70 pagesPEH A2-A6 Process Controller Serv Man 0740801006Mário Silva100% (1)
- Translated Version of LüdemannZankelDocument7 pagesTranslated Version of LüdemannZankelCristian DianaNo ratings yet
- VSRDocument63 pagesVSRpandugadu22No ratings yet
- Remove noise from DC motors with an LC filterDocument7 pagesRemove noise from DC motors with an LC filterbill_gator20059105No ratings yet
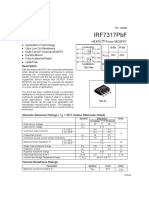
- Irf 7317 PBFDocument10 pagesIrf 7317 PBFmhasansharifiNo ratings yet
- Technical Evaluation (Various PRS) - ABB ComponentsDocument5 pagesTechnical Evaluation (Various PRS) - ABB ComponentsMalvin NapaoNo ratings yet
- Littelfuse LED Protector PLED Ultra Low Holding Current Datasheet PDFDocument4 pagesLittelfuse LED Protector PLED Ultra Low Holding Current Datasheet PDFEsas ElektronikNo ratings yet
- UEE001Document1 pageUEE001ishuNo ratings yet
- Vector Drive Troubleshooting GuideDocument9 pagesVector Drive Troubleshooting GuideIsrael Martinez AlonsoNo ratings yet