You might also like
- Hidraulik System With Matlab PDFDocument8 pagesHidraulik System With Matlab PDFrobinsongiraldoNo ratings yet
- Report Pedro 2012-06-13 2Document8 pagesReport Pedro 2012-06-13 2Ahmed NashaatNo ratings yet
- Study of Pneumatic Speed Control System With Friction Force CompensationDocument8 pagesStudy of Pneumatic Speed Control System With Friction Force CompensationInternational Journal of Research in Engineering and ScienceNo ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- 2-Ijems 16 (1) 7-13Document7 pages2-Ijems 16 (1) 7-13Sasko DimitrovNo ratings yet
- GluckKK PDFDocument6 pagesGluckKK PDFbrgrNo ratings yet
- Blondet1988 1Document18 pagesBlondet1988 1Joel ArzapaloNo ratings yet
- 58-Dynamic Behavior of A Hydraulic Braking Valve Incorporating A Hydraulic Servo ActuatorDocument15 pages58-Dynamic Behavior of A Hydraulic Braking Valve Incorporating A Hydraulic Servo ActuatorGalal RabieNo ratings yet
- Model of A Nozzle-Flapper Type Pneumatic Servo Valve and Differential Pressure Control System DesignDocument6 pagesModel of A Nozzle-Flapper Type Pneumatic Servo Valve and Differential Pressure Control System DesignEric KerrNo ratings yet
- Aircraft Elevon Actuation System SimulationDocument11 pagesAircraft Elevon Actuation System SimulationAbeer KhatriNo ratings yet
- Ying Xin, Yao Yao, Ming Liu and Wenyu ZhangDocument9 pagesYing Xin, Yao Yao, Ming Liu and Wenyu ZhangVăn Nghĩa NguyễnNo ratings yet
- SPE 69403 Estimating IPR Curves in Intermittent Gas Lift Wells From Standard Production TestsDocument7 pagesSPE 69403 Estimating IPR Curves in Intermittent Gas Lift Wells From Standard Production TestsJujupNo ratings yet
- Linier Hydraulic Actuators FinalDocument31 pagesLinier Hydraulic Actuators FinalBram AsthaNo ratings yet
- محاضرة نبتل بتاع الهيدروليك سيستم8Document6 pagesمحاضرة نبتل بتاع الهيدروليك سيستم8قطائف العواطفNo ratings yet
- A Study on How Servovalve Design Affects Closed-Loop Position Control PerformanceDocument14 pagesA Study on How Servovalve Design Affects Closed-Loop Position Control PerformanceKhang TruongNo ratings yet
- Allsop Popelinsky 2Document10 pagesAllsop Popelinsky 2eventnowNo ratings yet
- LagdamperDocument1 pageLagdampermayureshrmahajanNo ratings yet
- Exp 1 - CSTR DynamicDocument20 pagesExp 1 - CSTR Dynamicjychong0% (1)
- processes-08-01664Document15 pagesprocesses-08-01664Yogesh RameshNo ratings yet
- Variable Displacement Control of The Concrete Pumping System Based On Dynamic ProgrammingDocument6 pagesVariable Displacement Control of The Concrete Pumping System Based On Dynamic ProgrammingKumardasNsNo ratings yet
- ACME - Spool Valve Leakage BehaviourDocument9 pagesACME - Spool Valve Leakage BehaviourUros GordicNo ratings yet
- Application of Cyclic Operation To Acetic-Water Separation Patrut 2019Document6 pagesApplication of Cyclic Operation To Acetic-Water Separation Patrut 2019nehaNo ratings yet
- Rotating Group Design For Vane Pump Flow Ripple Reduction: Leonardo Zanetti-Rocha and Samir N.Y. GergesDocument9 pagesRotating Group Design For Vane Pump Flow Ripple Reduction: Leonardo Zanetti-Rocha and Samir N.Y. GergesJavier TorresNo ratings yet
- Control of Shunt Active FilterDocument31 pagesControl of Shunt Active FilterPooja VanamNo ratings yet
- 3.10 - Valves - Modeling Dynamics - Engineering LibreTextsDocument5 pages3.10 - Valves - Modeling Dynamics - Engineering LibreTextsKyriakos MichalakiNo ratings yet
- CHEN3005 Process Instrumentation and ControlDocument4 pagesCHEN3005 Process Instrumentation and ControlVincent Ys TanNo ratings yet
- ChE Lab 1 Experiment 2Document33 pagesChE Lab 1 Experiment 2Julie Anne CristalesNo ratings yet
- Gas Well PerformanceDocument23 pagesGas Well Performanceokus55No ratings yet
- Turbulent Flow Simulation in Kaplan Draft Tube: Z. Čarija, Z. Mrša and L.DragovićDocument8 pagesTurbulent Flow Simulation in Kaplan Draft Tube: Z. Čarija, Z. Mrša and L.DragovićKhalid AhmedNo ratings yet
- SPE 107899 Integrated Analysis For PCP Systems: Internal Forces in A PCPDocument10 pagesSPE 107899 Integrated Analysis For PCP Systems: Internal Forces in A PCPmiguel_jose123No ratings yet
- Module 8 - Pressure Drawdown TestsDocument13 pagesModule 8 - Pressure Drawdown TestsMuhammad Umair AliNo ratings yet
- Universal correlations for predicting complete pump performanceDocument10 pagesUniversal correlations for predicting complete pump performanceAsim Sarwar100% (1)
- Drive of Weapon With Together Bound Barrels and BreechesDocument6 pagesDrive of Weapon With Together Bound Barrels and Breechesihv69No ratings yet
- Robust Position Control of EHA Using SMC and RBFNNDocument6 pagesRobust Position Control of EHA Using SMC and RBFNNCumhur ÖzbaşNo ratings yet
- Valve CharacteristicsDocument2 pagesValve Characteristicssaliljain2001No ratings yet
- Virtual Model Test For A Francis Turbine: Home Search Collections Journals About Contact Us My IopscienceDocument11 pagesVirtual Model Test For A Francis Turbine: Home Search Collections Journals About Contact Us My Iopsciencecojo_drNo ratings yet
- C2 Hydraulic Pumps MotorsDocument38 pagesC2 Hydraulic Pumps MotorsJovMac ManzanoNo ratings yet
- 3 - Pump-Pipeline System Analyses and DesignDocument9 pages3 - Pump-Pipeline System Analyses and DesignAnonymous 7oXNA46xiNNo ratings yet
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşNo ratings yet
- Reaction Engineering Chapter 6 Class NotesDocument31 pagesReaction Engineering Chapter 6 Class Notesyonathanash44No ratings yet
- Acosta Aj 1952Document58 pagesAcosta Aj 1952dodo1986No ratings yet
- Pump Performance Curves and Similarity RulesDocument27 pagesPump Performance Curves and Similarity RulesMaryamNo ratings yet
- Design of ReactorDocument32 pagesDesign of ReactorestiononugrohoNo ratings yet
- GoyalDocument3 pagesGoyalVan LeNo ratings yet
- Mathematical Modeling of Two Tank System Ijariie4840Document8 pagesMathematical Modeling of Two Tank System Ijariie4840Abeng YogtaNo ratings yet
- Feedbacks in Hydraulic Servo Systems RydbergDocument21 pagesFeedbacks in Hydraulic Servo Systems Rydbergc1ronNo ratings yet
- 1-ITK-330 Introduction & Basic ConceptsDocument28 pages1-ITK-330 Introduction & Basic ConceptsASUPREMEANo ratings yet
- KSB Centrifugal Pump DesignDocument47 pagesKSB Centrifugal Pump Designggrapsas100% (3)
- Cavitation CFD in A Centrifugal PumpDocument7 pagesCavitation CFD in A Centrifugal Pumpazispn99100% (1)
- Analysis of Dynamic Characteristics of Pneumatic Systems Using Fractional CalculusDocument9 pagesAnalysis of Dynamic Characteristics of Pneumatic Systems Using Fractional CalculushamzaNo ratings yet
- Load F Requan Cy Contro 201Document20 pagesLoad F Requan Cy Contro 201Focus OnNo ratings yet
- List of Data Given:: Design 3Document3 pagesList of Data Given:: Design 3ashraf refaatNo ratings yet
- Numerical Study of Fluid Flow in Sucker Rod Pump Using Finite Element MethodDocument13 pagesNumerical Study of Fluid Flow in Sucker Rod Pump Using Finite Element MethodRichard More LeonNo ratings yet
- Plug Flow ReactorDocument7 pagesPlug Flow Reactorsri pragnaNo ratings yet
- Performance Equations For ReactorsDocument53 pagesPerformance Equations For ReactorsGuhan KANo ratings yet
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoNo ratings yet
- Kon-41.3023 Hydraulics and Pneumatics - Collection of Hydraulic ProblemsDocument14 pagesKon-41.3023 Hydraulics and Pneumatics - Collection of Hydraulic Problemsvipul100% (1)
- Intake and Exhaust Flow in Internal Combustion EnginesDocument28 pagesIntake and Exhaust Flow in Internal Combustion EnginesAsif RazaNo ratings yet
- Computational NeuroendocrinologyFrom EverandComputational NeuroendocrinologyDuncan J. MacGregorNo ratings yet
- November ReportDocument7 pagesNovember ReportNavneetNo ratings yet
- Elements of Mining Technology Power CalculationDocument5 pagesElements of Mining Technology Power CalculationNavneetNo ratings yet
- Unit 5 - Mechanical Loaders - UMEDocument48 pagesUnit 5 - Mechanical Loaders - UMENavneetNo ratings yet
- FactorialDocument1 pageFactorialNavneetNo ratings yet
- SCM 04Document23 pagesSCM 04NavneetNo ratings yet
- OPTIMIZING SUPPLY CHAIN NETWORK LOCATIONS AND CAPACITIESDocument17 pagesOPTIMIZING SUPPLY CHAIN NETWORK LOCATIONS AND CAPACITIESNavneetNo ratings yet
- There Are Three Types of Control Systems in Hydrostatic DrivesDocument6 pagesThere Are Three Types of Control Systems in Hydrostatic DrivesNavneetNo ratings yet
- Thermal Modelling Expert Program Hydraulic SystemDocument13 pagesThermal Modelling Expert Program Hydraulic SystemEnes DuvarcıNo ratings yet
- Thermal Modeling of Aircraft Piston PumpsDocument5 pagesThermal Modeling of Aircraft Piston PumpsNavneetNo ratings yet
- Sy 215CDocument4 pagesSy 215Csony100% (1)
- A-2-H Actuator (p57159-11)Document6 pagesA-2-H Actuator (p57159-11)Prajna SatyaNo ratings yet
- Directional Spool Valve Type SG and SP: Versions For Direct Pipe Connection or Manifold MountingDocument8 pagesDirectional Spool Valve Type SG and SP: Versions For Direct Pipe Connection or Manifold MountingThiago LimaNo ratings yet
- MEP Vol. 1.7 Hydraulic Power TransmissionDocument56 pagesMEP Vol. 1.7 Hydraulic Power TransmissiontitanwlxNo ratings yet
- #022 - BDL1250A Complete ManualDocument56 pages#022 - BDL1250A Complete ManualROMERJOSE100% (1)
- Project ReportDocument36 pagesProject Reportvishi89No ratings yet
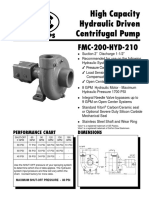
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- 25948-Xtreme XR620 XR621 XR842 XR1045 XR1245 XR1254 XR1267 XR1534 XR2050 XR3034Document277 pages25948-Xtreme XR620 XR621 XR842 XR1045 XR1245 XR1254 XR1267 XR1534 XR2050 XR3034mitreskiantonio18No ratings yet
- Case Ih Magnum Tractor Hydraulic Hose DiagramsDocument540 pagesCase Ih Magnum Tractor Hydraulic Hose DiagramsMega Polis100% (1)
- BAGER 336F - L-LN - EngDocument36 pagesBAGER 336F - L-LN - EngalmirNo ratings yet
- Doosan DL250 Wheel Loader SpecDocument3 pagesDoosan DL250 Wheel Loader SpecIslam ShoukryNo ratings yet
- Anhui Lai Fu CNC Machine Tool Co., Ltd. YL32 Series Four-Column Deep Drawing Hydraulic PressesDocument4 pagesAnhui Lai Fu CNC Machine Tool Co., Ltd. YL32 Series Four-Column Deep Drawing Hydraulic PressesBALANo ratings yet
- General Hydraulic Manual 02Document196 pagesGeneral Hydraulic Manual 02Malek r.i.pNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document19 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Josué Abel Mamani RevillaNo ratings yet
- Vebm090100 WF550-3 T-3Document394 pagesVebm090100 WF550-3 T-3Baciu NicolaeNo ratings yet
- Ls Directional Control Valves Installation & User Guide: SpecificationsDocument4 pagesLs Directional Control Valves Installation & User Guide: Specificationsdanang prasetio100% (1)
- Operator'S: ManualDocument50 pagesOperator'S: ManualStelian CrisanNo ratings yet
- Mini Escavadora 17 ZTS PDFDocument299 pagesMini Escavadora 17 ZTS PDFAnonymous KOtSfT6qNo ratings yet
- DA-2002 Hydraulic Fluid Power-General Rules Related To Systems Ver2SE07Document15 pagesDA-2002 Hydraulic Fluid Power-General Rules Related To Systems Ver2SE07Maximiliano DreyerNo ratings yet
- Rammer 5011 Service ManualDocument76 pagesRammer 5011 Service ManualSerkanAl100% (1)
- Hydraulic Pump Selection GuideDocument38 pagesHydraulic Pump Selection Guidemurad85No ratings yet
- Fiat Kobelco w170 170pl w190 Wheel Loader Service ManualDocument20 pagesFiat Kobelco w170 170pl w190 Wheel Loader Service Manualchelsea100% (41)
- The KP Pushbutton: BenefitsDocument1 pageThe KP Pushbutton: BenefitsJeisson HolguinNo ratings yet
- General Operating Instructions Closed Circuit Axial Piston Pumps and MotorsDocument20 pagesGeneral Operating Instructions Closed Circuit Axial Piston Pumps and Motorsмакс некрашевич100% (2)
- Drilling HydraulicsDocument24 pagesDrilling HydraulicsKolawole AdisaNo ratings yet
- Installation Manual Unic Hydraulic Crane For Marine Use Thanh HSEDocument52 pagesInstallation Manual Unic Hydraulic Crane For Marine Use Thanh HSEThànhHse100% (1)
- Diamec 6 MCR: Mobile Core Drilling RigDocument5 pagesDiamec 6 MCR: Mobile Core Drilling RigNani NaniNo ratings yet
- Hydraulics GlossaryDocument5 pagesHydraulics GlossaryAlan Date100% (1)
- Cat 826HDocument24 pagesCat 826HJesús PalomaresNo ratings yet
- t250 2pages Maintenance ChartDocument2 pagest250 2pages Maintenance ChartcartsfartsNo ratings yet