You might also like
- Engineering Short Answer QuestionsDocument31 pagesEngineering Short Answer Questionsmadhu35No ratings yet
- Partial Samsung Voir DireDocument3 pagesPartial Samsung Voir DireMikey CampbellNo ratings yet
- Ipc ProjectDocument27 pagesIpc Projectkeerthi81% (16)
- Assignment StaticDocument24 pagesAssignment StaticSuhayl AzminNo ratings yet
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNo ratings yet
- Rigid bodies and vector quantitiesDocument11 pagesRigid bodies and vector quantitiesمنتظر محمدNo ratings yet
- Equilibrium: This Module Aims That The Students Will Be Able ToDocument12 pagesEquilibrium: This Module Aims That The Students Will Be Able ToMonique UnicoNo ratings yet
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologyaliNo ratings yet
- Laws of Motion MKDocument26 pagesLaws of Motion MKriddhiarunkarangaleNo ratings yet
- Dynamics Summary NotesDocument7 pagesDynamics Summary NotesArlo SeasenNo ratings yet
- Engineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraDocument14 pagesEngineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraSathiyaseelan SubramaniNo ratings yet
- Statics - Force SystemDocument4 pagesStatics - Force SystemReynald RenzNo ratings yet
- Lesson 1: Fundamental Concepts of MechanicsDocument23 pagesLesson 1: Fundamental Concepts of MechanicsArexcin Ray C. TimbalNo ratings yet
- Rigid Body Equilibrium ConditionsDocument21 pagesRigid Body Equilibrium ConditionsNicholas Bonn SingNo ratings yet
- Static and Strength of MaterialsDocument180 pagesStatic and Strength of MaterialsYassin AmrirNo ratings yet
- Topic 8 The Laws of Dynamics. Differential Equations of Motion For A ParticleDocument94 pagesTopic 8 The Laws of Dynamics. Differential Equations of Motion For A ParticleFerid AslanliNo ratings yet
- Equations of Equilibrium in Two DimensionsDocument14 pagesEquations of Equilibrium in Two DimensionsEhreenNo ratings yet
- Assignment 1Document5 pagesAssignment 1qmjcmarquezNo ratings yet
- NoessDocument7 pagesNoessarpita9619080670No ratings yet
- Lec 3Document29 pagesLec 3துளசி இன்போஸ்No ratings yet
- Unit IDocument10 pagesUnit ISri RNo ratings yet
- نموذج1Document11 pagesنموذج1kikk59967No ratings yet
- New Module 1 MechanicsDocument23 pagesNew Module 1 MechanicsGARAY, EUGENIONo ratings yet
- DynamicsDocument12 pagesDynamicsmigs_gomezNo ratings yet
- Statics of Rigid BodiesDocument2 pagesStatics of Rigid BodiesHazelNoreenSabileManalo100% (1)
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Mechanics Lab1Document7 pagesMechanics Lab1yogendra kumarNo ratings yet
- Particle Kinetics Force, Mass and AccelerationDocument7 pagesParticle Kinetics Force, Mass and AccelerationJeric Ryan GalanNo ratings yet
- The Subject of StaticsDocument12 pagesThe Subject of StaticsAsadullah JamalovNo ratings yet
- Newton's Laws of Motion and Force InteractionsDocument29 pagesNewton's Laws of Motion and Force InteractionsMehwish IsrarNo ratings yet
- PH110-CHAPTER 4 DynamicsDocument17 pagesPH110-CHAPTER 4 DynamicsNtape Knox SiwaleNo ratings yet
- Physics Newton'sLawsofMotionDocument44 pagesPhysics Newton'sLawsofMotionCamela LacsamaNo ratings yet
- Newton's Laws of Motion ExplainedDocument13 pagesNewton's Laws of Motion ExplainedChinmay SharmaNo ratings yet
- ENGINEERING MECHANICS FUNDAMENTALSDocument57 pagesENGINEERING MECHANICS FUNDAMENTALSRandomNo ratings yet
- Mechanics Basics and PrinciplesDocument58 pagesMechanics Basics and PrinciplesFerid AslanliNo ratings yet
- Chapter 5 Review Sheet: The Laws of Motion: Orianna Torres AP Physics CDocument4 pagesChapter 5 Review Sheet: The Laws of Motion: Orianna Torres AP Physics CLynn Hollenbeck BreindelNo ratings yet
- Saanvi Shee XIB Roll 10 Physics Term 1 ProjectDocument27 pagesSaanvi Shee XIB Roll 10 Physics Term 1 ProjectSing GyaniNo ratings yet
- DynamicsDocument26 pagesDynamicschimdesa TolesaNo ratings yet
- Fundamental Concepts of MechanicsDocument3 pagesFundamental Concepts of Mechanicskamilbisma50% (2)
- Engineering Mechanics I To III Units PDFDocument143 pagesEngineering Mechanics I To III Units PDFAnil KumarNo ratings yet
- Chapter 1 Introduction SEDocument6 pagesChapter 1 Introduction SEniraj pandeyNo ratings yet
- Newton's Laws of MotionDocument43 pagesNewton's Laws of MotionNasr UllahNo ratings yet
- Engg. MechanicsDocument29 pagesEngg. MechanicsSunand Pongurlekar100% (1)
- Lecture 3 Single Degree of Freedom ModelDocument6 pagesLecture 3 Single Degree of Freedom ModelMR. PRASANNA KUMAR MALLANo ratings yet
- 2 - Equilibrium of Particle in 2DDocument24 pages2 - Equilibrium of Particle in 2DHielNo ratings yet
- Laws of MotionDocument26 pagesLaws of Motionaslamfiza06No ratings yet
- Bunday's MathematicsDocument30 pagesBunday's Mathematicsrubberduck999flexNo ratings yet
- Mechanics PortionDocument55 pagesMechanics PortionRupak MandalNo ratings yet
- Newton'S Laws of Motion: 1 ForceDocument5 pagesNewton'S Laws of Motion: 1 ForceCharl CuaNo ratings yet
- General Physics I Essay by Farid MammadovDocument24 pagesGeneral Physics I Essay by Farid MammadovФарид МамедовNo ratings yet
- Chapter 4-Equilibrium of Rigid BodiesDocument3 pagesChapter 4-Equilibrium of Rigid BodiesEllaMariePaceteNo ratings yet
- Grade 11 Physics Notes - Dynamics: Aaron G. KebedeDocument12 pagesGrade 11 Physics Notes - Dynamics: Aaron G. KebedeAaron KebedeNo ratings yet
- Dynamics - Lecture TwoDocument22 pagesDynamics - Lecture TwoKassimNo ratings yet
- SoRB - M1 23 24Document2 pagesSoRB - M1 23 24Joel MiradorNo ratings yet
- Chapter 2-1Document18 pagesChapter 2-1الخليل إبراهيمNo ratings yet
- Ch1 Newton MechanicsDocument16 pagesCh1 Newton MechanicsRana JahanzaibNo ratings yet
- Kinetics of Particles - 1Document37 pagesKinetics of Particles - 1ZidaneNo ratings yet
- ENGINEERING MECHANICS ENERGY METHODSDocument35 pagesENGINEERING MECHANICS ENERGY METHODSprodn123No ratings yet
- Lesson 8 - Newtons Laws of MotionDocument30 pagesLesson 8 - Newtons Laws of Motionpraisengoma817No ratings yet
- Study Package On Newtons Law of MotionDocument59 pagesStudy Package On Newtons Law of MotionApex Institute67% (3)
- Bakunin - Power Corrupts The BestDocument1 pageBakunin - Power Corrupts The Best7YfvnJSWuNo ratings yet
- The Selection of The Civil EngineerDocument29 pagesThe Selection of The Civil EngineerMaria Elline FilloresNo ratings yet
- Gentile Folly The RothschildsDocument67 pagesGentile Folly The RothschildsEdward JNo ratings yet
- 1906arunachala Tyaga RajanDocument2 pages1906arunachala Tyaga Rajanmahadi473No ratings yet
- Msds 51910419745 Titan SilverDocument6 pagesMsds 51910419745 Titan SilverAnonymous fXWzyInNo ratings yet
- The Origins Development and Possible Decline of The Modern StateDocument65 pagesThe Origins Development and Possible Decline of The Modern StateJasper Jade MartinNo ratings yet
- Memorandum of Family Settlement For The Properties of Late Dr. Vasudev Sharan AgarwalDocument6 pagesMemorandum of Family Settlement For The Properties of Late Dr. Vasudev Sharan AgarwalRaghvendra AgarwalNo ratings yet
- BRC PWD ReportDocument64 pagesBRC PWD ReportJudy AndorNo ratings yet
- Genealogy of The National-Popular Project of Social Transformation in The Philippines (1896-1940)Document25 pagesGenealogy of The National-Popular Project of Social Transformation in The Philippines (1896-1940)Cha BuenaventuraNo ratings yet
- Screenshot 2019-11-11 at 7.51.56 PMDocument1 pageScreenshot 2019-11-11 at 7.51.56 PMShamsa SohaibNo ratings yet
- Panel of Transaction AdvisorsDocument3 pagesPanel of Transaction AdvisorsDey LiNo ratings yet
- IBPS Exam Details: Dates, Eligibility, Selection ProcessDocument3 pagesIBPS Exam Details: Dates, Eligibility, Selection ProcessNikhil KumarNo ratings yet
- Board of Med Asso. Vs AlfonsoDocument6 pagesBoard of Med Asso. Vs Alfonsomsu7070No ratings yet
- Perpetual Inventory SystemDocument6 pagesPerpetual Inventory SystemJonalyn DicdicanNo ratings yet
- BOC Import License Documentary RequirementsDocument2 pagesBOC Import License Documentary RequirementsGabriel EmersonNo ratings yet
- 2016 Melaka SPM Trial - English Paper 1Document2 pages2016 Melaka SPM Trial - English Paper 1gomathi2475% (4)
- TCS Ratio AnalysisDocument2 pagesTCS Ratio AnalysisLogesh SureshNo ratings yet
- infoPLC - Net - Servo Drives CMMT - SIEMENS Tia Portal - Control Con Librería DriveLib de Siemen ES - 21021601 - Rev04Document27 pagesinfoPLC - Net - Servo Drives CMMT - SIEMENS Tia Portal - Control Con Librería DriveLib de Siemen ES - 21021601 - Rev04estrella marNo ratings yet
- Management ProjectDocument20 pagesManagement ProjectPrasad BhumkarNo ratings yet
- Labour Law - NotesDocument190 pagesLabour Law - NotesAkshat YadavNo ratings yet
- Pricing: Understanding and Capturing Customer ValueDocument31 pagesPricing: Understanding and Capturing Customer ValueAlrifai Ziad Ahmed100% (2)
- SW 1003398 NEC Article 311 Medium Voltage Conductors and Cables White Paper LODocument8 pagesSW 1003398 NEC Article 311 Medium Voltage Conductors and Cables White Paper LOwmkaneNo ratings yet
- ACCTG 105 Midterm - Quiz No. 02 - Accounting Changes and Errors (Answers)Document2 pagesACCTG 105 Midterm - Quiz No. 02 - Accounting Changes and Errors (Answers)Lucas BantilingNo ratings yet
- Tender Evaluation Report for PROJECT NAME ConstructionDocument7 pagesTender Evaluation Report for PROJECT NAME ConstructionDanny EricoNo ratings yet
- 2017recoverycirculars2017recovery2017016 PDFDocument100 pages2017recoverycirculars2017recovery2017016 PDFDeepak Tandon100% (1)
- S1-17 18 PDFDocument1 pageS1-17 18 PDFganeshp_eeeNo ratings yet
- Https Uppolice - Gov.in FrmPrint - AspxDocument3 pagesHttps Uppolice - Gov.in FrmPrint - AspxVishal VishalNo ratings yet
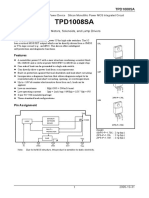
- TPD1008SA High-Side Power Switch GuideDocument11 pagesTPD1008SA High-Side Power Switch GuideOlga PlohotnichenkoNo ratings yet