You might also like
- Wiring Diagrams 2007-2008Document310 pagesWiring Diagrams 2007-2008jorge luis guevara martinezNo ratings yet
- Audi A6 No. 71 / 2: Current Flow DiagramDocument8 pagesAudi A6 No. 71 / 2: Current Flow DiagramDascaliuc Daniel100% (1)
- Audi A3 Audi A3 Audi A3 Audi A3 No. 2 / 1 No. 2 / 1 No. 2 / 1 No. 2 / 1Document18 pagesAudi A3 Audi A3 Audi A3 Audi A3 No. 2 / 1 No. 2 / 1 No. 2 / 1 No. 2 / 1Crisedu VasriNo ratings yet
- Vag BLG May 2006Document18 pagesVag BLG May 2006cork_ieNo ratings yet
- Service: Audi A6 1998Document77 pagesService: Audi A6 1998Kovács EndreNo ratings yet
- SSP-285 Running Gear Audi A8 Part 2 PDFDocument31 pagesSSP-285 Running Gear Audi A8 Part 2 PDFRizwan HameedNo ratings yet
- SSP 300 6 Speed Automatic Transmission 09DDocument56 pagesSSP 300 6 Speed Automatic Transmission 09DKatarina UllforsNo ratings yet
- Adding Turbo To VR6 3.2 QA #1Document9 pagesAdding Turbo To VR6 3.2 QA #1LucasPalombaNo ratings yet
- S13 SR20 Guide 08Document20 pagesS13 SR20 Guide 08Алексей Иванченко100% (1)
- Opel Motronic2.5 PDFDocument5 pagesOpel Motronic2.5 PDFjesrafNo ratings yet
- Manual Transmàssion 6 Speed PDFDocument55 pagesManual Transmàssion 6 Speed PDFIvan Alex Escobar100% (1)
- SSP213 New Technology 99 PDFDocument72 pagesSSP213 New Technology 99 PDFjuanma1358No ratings yet
- SSP 040 Automatic Gearbox 001 FabiaDocument46 pagesSSP 040 Automatic Gearbox 001 FabiaKovács EndreNo ratings yet
- Haltech Support CenterDocument15 pagesHaltech Support Centerkorovnikovdenis8No ratings yet
- Technical Service Information: BMW ZF-5HP-18Document2 pagesTechnical Service Information: BMW ZF-5HP-18Alejandro RoldanNo ratings yet
- Clutch Release Mechanism, Servicing: 1 - Transmission 2 - Intermediate PieceDocument9 pagesClutch Release Mechanism, Servicing: 1 - Transmission 2 - Intermediate PieceNilson BarbosaNo ratings yet
- Fuse Box Diagram Ford EcoSport (2013-2017)Document8 pagesFuse Box Diagram Ford EcoSport (2013-2017)chennaimaterialsupplyNo ratings yet
- 100-00 DTC RecoveryDocument9 pages100-00 DTC RecoveryFerhan SerdarogluNo ratings yet
- Audi A8 Fuses LocationDocument42 pagesAudi A8 Fuses Locationestonie12No ratings yet
- Wheel Speed Sensors: #SecurityinsideDocument8 pagesWheel Speed Sensors: #Securityinsidelizar69No ratings yet
- 2012 Renault Koleos 63519Document233 pages2012 Renault Koleos 63519Mihailo PlećevićNo ratings yet
- Overall Network (GVN) Function - 205Document8 pagesOverall Network (GVN) Function - 205Ritesh100% (1)
- AEB A4 Od1997 Schema MotoraDocument9 pagesAEB A4 Od1997 Schema MotoraRóbert Ondáš100% (1)
- 2012 SLK 350 3.5 V6 Spark Plug Replacement GuideDocument17 pages2012 SLK 350 3.5 V6 Spark Plug Replacement GuideIgor_Predator100% (3)
- 968 Fuse Box ChartDocument1 page968 Fuse Box Chartdamon wNo ratings yet
- Component Description For Exhaust Aftertreatment Control UnitDocument2 pagesComponent Description For Exhaust Aftertreatment Control UnitAndrei BaluseNo ratings yet
- FT350 FT400 V17 PDFDocument60 pagesFT350 FT400 V17 PDFМирослав КарановићNo ratings yet
- Ecuf HelpDocument22 pagesEcuf HelpАндрей МихайловичNo ratings yet
- D4B80762D4F-Maintenance (06.2017) PDFDocument120 pagesD4B80762D4F-Maintenance (06.2017) PDFrobbertmdNo ratings yet
- E36 BMW CRUISE CONTROL RETROFIT GUIDEDocument16 pagesE36 BMW CRUISE CONTROL RETROFIT GUIDEdvggaNo ratings yet
- VW Toureg 2003-2017 - Hybrid Electrical SystemDocument53 pagesVW Toureg 2003-2017 - Hybrid Electrical SystemChristian Linares Abreu100% (1)
- 1999 A4 AfbDocument12 pages1999 A4 AfbEdijs AlksnisNo ratings yet
- Remove E60 530d Turbo PDFDocument2 pagesRemove E60 530d Turbo PDFmassimo1983100% (2)
- Porsche Cayenne 3.6L, Charging Circuit - Electrical Wiring DiagramDocument1 pagePorsche Cayenne 3.6L, Charging Circuit - Electrical Wiring DiagramAngel Velasquez100% (1)
- Introduction of The Smart Fortwo Electric Drive (3rd Generation) Model Series 451Document92 pagesIntroduction of The Smart Fortwo Electric Drive (3rd Generation) Model Series 451გიორგი ჯიქიძეNo ratings yet
- Climatronic 4-C From November 2002 PDFDocument1,356 pagesClimatronic 4-C From November 2002 PDFAluma MotorNo ratings yet
- ProductGuide C63SEDocument29 pagesProductGuide C63SEDevon pereraNo ratings yet
- Air Conditioning: Service Manual: System Wiring DiagramsDocument124 pagesAir Conditioning: Service Manual: System Wiring DiagramsJonas Dos Santos AndradeNo ratings yet
- Speed Control - TDV6 3.0L DieselDocument18 pagesSpeed Control - TDV6 3.0L DieselAlberto Mock GonzalesNo ratings yet
- SSP 992003 A6 AllroadquattroDocument56 pagesSSP 992003 A6 Allroadquattroandrei-bobNo ratings yet
- SSP 298 Touareg Electrics PDFDocument31 pagesSSP 298 Touareg Electrics PDFRomeo BelkoNo ratings yet
- Fusion Hybrid MKZ Hybrid 2012: Emergency Response GuideDocument12 pagesFusion Hybrid MKZ Hybrid 2012: Emergency Response GuideTung NguyenNo ratings yet
- Aisin Af406Document18 pagesAisin Af406emiliqn velikov100% (1)
- Regalage AccDocument11 pagesRegalage AccJOHNNY5377No ratings yet
- LTB00478NAS2Document3 pagesLTB00478NAS2Massahiro FilhoNo ratings yet
- ElsaWin 4.0 How To Instal PDFDocument38 pagesElsaWin 4.0 How To Instal PDFadrian2009_adiNo ratings yet
- E39 Hot-Film Mass Air Flow SensorDocument3 pagesE39 Hot-Film Mass Air Flow SensorJosue EstradaNo ratings yet
- T5 Pin Connector Assignments Selected Connections PDFDocument10 pagesT5 Pin Connector Assignments Selected Connections PDFSasa MitrovicNo ratings yet
- VAG 2.5 V6 TDI - Timing Belt Set-Up.: Possible ProblemsDocument4 pagesVAG 2.5 V6 TDI - Timing Belt Set-Up.: Possible ProblemsASNo ratings yet
- Rear - Camera MINI OEMDocument18 pagesRear - Camera MINI OEMEdiJonNo ratings yet
- 2012 A6 Self Study Program Part 1 PDFDocument44 pages2012 A6 Self Study Program Part 1 PDFJavier SerranoNo ratings yet
- 1.4 l/55 KW - 4AV, Engine Codes AHW, AKQ: Current Flow DiagramDocument9 pages1.4 l/55 KW - 4AV, Engine Codes AHW, AKQ: Current Flow DiagramSaul CalderónNo ratings yet
- DSG The Intelligent Automatic Gearbox From Volkswagen 2008 enDocument14 pagesDSG The Intelligent Automatic Gearbox From Volkswagen 2008 enCocarlea StelianNo ratings yet
- E1050 CAN Connection LinesDocument10 pagesE1050 CAN Connection LinesalexxmanuNo ratings yet
- Audi Portal - ECU Diagnostic - Audi A4 8K (2008-) Basic SettingsDocument3 pagesAudi Portal - ECU Diagnostic - Audi A4 8K (2008-) Basic Settingsgeronimo montiNo ratings yet
- Electronic Stability Program (ESP)Document1 pageElectronic Stability Program (ESP)gauthy123No ratings yet
- Electronic Stability ProgrammeDocument11 pagesElectronic Stability Programmen_amarsinh9938100% (3)
- Cấu tạo nguyên lí hoạt động hệ thống ổn định xe điện tử ESPDocument4 pagesCấu tạo nguyên lí hoạt động hệ thống ổn định xe điện tử ESPlinh congNo ratings yet
- Electronic Stability Program (ESP)Document3 pagesElectronic Stability Program (ESP)george_mudura1No ratings yet
- Everything You Need to Know About Car Air Conditioning SystemsDocument72 pagesEverything You Need to Know About Car Air Conditioning SystemsDinsosnakertrans KudusNo ratings yet
- Tools Cabinet 4 Motorcycel PDFDocument6 pagesTools Cabinet 4 Motorcycel PDFDinsosnakertrans KudusNo ratings yet
- Lion Air Eticket Itinerary / Receipt: Matrejo/Matrejo MRDocument4 pagesLion Air Eticket Itinerary / Receipt: Matrejo/Matrejo MRFarida Ratna SariNo ratings yet
- Homework PR Pe Er Kerjakan Di RumahDocument35 pagesHomework PR Pe Er Kerjakan Di RumahDinsosnakertrans KudusNo ratings yet
- V Matic Transmision AHMDocument29 pagesV Matic Transmision AHMDinsosnakertrans Kudus100% (1)
- Tools Cabinet 4 MotorcyceleDocument6 pagesTools Cabinet 4 MotorcyceleDinsosnakertrans KudusNo ratings yet
- Tugas FreehandDocument1 pageTugas FreehandDinsosnakertrans KudusNo ratings yet
- VSGV Ergt324Document1 pageVSGV Ergt324Dinsosnakertrans KudusNo ratings yet
- Add Your Title Here: Replace Your Text Here! Replace Your Text Here!Document4 pagesAdd Your Title Here: Replace Your Text Here! Replace Your Text Here!Dinsosnakertrans KudusNo ratings yet
- HHJ Lihd Aoiu8 Usu d8 - 09s8d8Document1 pageHHJ Lihd Aoiu8 Usu d8 - 09s8d8Dinsosnakertrans KudusNo ratings yet
- PATTERN Oriole Bag 1 1 PDFDocument14 pagesPATTERN Oriole Bag 1 1 PDFDinsosnakertrans KudusNo ratings yet
- Page 2 Lunch Box BagDocument9 pagesPage 2 Lunch Box BagDinsosnakertrans KudusNo ratings yet
- Bgeryh 34y 3yDocument4 pagesBgeryh 34y 3yDinsosnakertrans KudusNo ratings yet
- Lion Air Eticket Itinerary / Receipt: Matrejo/Matrejo MRDocument4 pagesLion Air Eticket Itinerary / Receipt: Matrejo/Matrejo MRFarida Ratna SariNo ratings yet
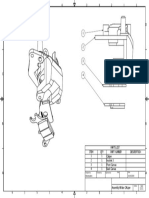
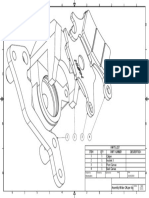
- Brake Caliper 1 PDFDocument1 pageBrake Caliper 1 PDFDinsosnakertrans KudusNo ratings yet
- Slaumdbskhad9r OifjffDocument4 pagesSlaumdbskhad9r OifjffDinsosnakertrans KudusNo ratings yet
- Brake Calp3Document1 pageBrake Calp3Dinsosnakertrans KudusNo ratings yet
- Brake Caliper 1Document1 pageBrake Caliper 1Dinsosnakertrans KudusNo ratings yet
- Manual 2 PDFDocument0 pagesManual 2 PDFNaveen_naidu1No ratings yet
- Lunch Box Bag PatternDocument1 pageLunch Box Bag PatternDinsosnakertrans KudusNo ratings yet
- Alum Atau Tawas Wikipedia EnglishDocument8 pagesAlum Atau Tawas Wikipedia EnglishDinsosnakertrans KudusNo ratings yet
- CorelDRAW VBA Object Model PDFDocument0 pagesCorelDRAW VBA Object Model PDFSunilkumar DubeyNo ratings yet
- Inventor TutorialsDocument2 pagesInventor TutorialsToth CsabaNo ratings yet
- Blok-V.SMK PembDocument1 pageBlok-V.SMK PembDinsosnakertrans KudusNo ratings yet
- Blok-V.SMK PembDocument1 pageBlok-V.SMK PembDinsosnakertrans KudusNo ratings yet
- Blok-V.SMK PembDocument1 pageBlok-V.SMK PembDinsosnakertrans KudusNo ratings yet
- Inventor TutorialsDocument2 pagesInventor TutorialsToth CsabaNo ratings yet
- Blok-V.SMK PembDocument1 pageBlok-V.SMK PembDinsosnakertrans KudusNo ratings yet
- Mandrel Ulir: Rough DimensionDocument1 pageMandrel Ulir: Rough DimensionDinsosnakertrans KudusNo ratings yet
- Driving Dynamics: ZF Axle Drives For CarsDocument10 pagesDriving Dynamics: ZF Axle Drives For Carssardhan.rajender84No ratings yet
- Jaguar I PACE Brochure EN 22myDocument56 pagesJaguar I PACE Brochure EN 22mymhantirahNo ratings yet
- 2014 Audi A5 Brochure PDFDocument34 pages2014 Audi A5 Brochure PDFVishal NaikNo ratings yet
- Range Rover Sport BrochureDocument102 pagesRange Rover Sport BrochurePopp Laurentiu Liviu100% (1)
- GranTurismo 4 - Tuning Guide Pt. IIDocument33 pagesGranTurismo 4 - Tuning Guide Pt. IIwaisingmakNo ratings yet
- Torque Vectoring Control: July 2018Document8 pagesTorque Vectoring Control: July 2018Santhoshbharathi MECHNo ratings yet
- New Range Rover: Your Personalised Land RoverDocument22 pagesNew Range Rover: Your Personalised Land RoverStan CarmenNo ratings yet
- NZ4WD - February 2024Document68 pagesNZ4WD - February 2024acojonoatodiosNo ratings yet
- ESP Elektronik Stability ProgramDocument44 pagesESP Elektronik Stability ProgramDinsosnakertrans KudusNo ratings yet
- Esp JM PDFDocument40 pagesEsp JM PDFJuan ContrerasNo ratings yet
- Defender-L663 20my Ebro Xc-En v3d Eu6 OptimizedDocument108 pagesDefender-L663 20my Ebro Xc-En v3d Eu6 OptimizedFiore Fiori100% (1)
- MSC Thesis FINAL - Anton StoopDocument104 pagesMSC Thesis FINAL - Anton Stoopkarlinhosmg100% (1)
- Jaguar F TYPE Brochure 1X1521810000BINEN01P - tcm163 355258 PDFDocument59 pagesJaguar F TYPE Brochure 1X1521810000BINEN01P - tcm163 355258 PDFappao vidyasagarNo ratings yet
- ZF Vector Drive ConceptsDocument48 pagesZF Vector Drive ConceptsConcept of ReasoningNo ratings yet
- NEVERA BROCHURE TECHNICAL SPECSDocument2 pagesNEVERA BROCHURE TECHNICAL SPECSDenisChipirliuNo ratings yet
- High Performance Drivetrain DTDO1 SpecsDocument1 pageHigh Performance Drivetrain DTDO1 SpecsIonut NicolaeNo ratings yet
- Subaru Price List Malaysia 2017Document12 pagesSubaru Price List Malaysia 2017Raymond GundiNo ratings yet
- Development of Chassis Performance Design Technologies For MBD of Mass-Production VehiclesDocument11 pagesDevelopment of Chassis Performance Design Technologies For MBD of Mass-Production VehiclesSam JacobNo ratings yet
- Jaguar XE Brochure 1X7601804SSSBGBEN01P - tcm76 386866 PDFDocument32 pagesJaguar XE Brochure 1X7601804SSSBGBEN01P - tcm76 386866 PDFjohnleeNo ratings yet
- Technical Information Manual: Evolution-Iv Evolution-VDocument139 pagesTechnical Information Manual: Evolution-Iv Evolution-VJuan ContrerasNo ratings yet
- New Range Rover: Created For Rabie NasserDocument18 pagesNew Range Rover: Created For Rabie NasserRabie NasserNo ratings yet
- Land Rover Defender Brochure 1L6632010000BUSEN02P - tcm293 767787 PDFDocument105 pagesLand Rover Defender Brochure 1L6632010000BUSEN02P - tcm293 767787 PDFMuhamad taufik100% (1)
- BMW M2 Specsheet PetrolDocument2 pagesBMW M2 Specsheet PetrolKevin Joe SebastianNo ratings yet
- Design Synthesis of Articulated Heavy Vehicles With Active Trailer Steering SystemsDocument125 pagesDesign Synthesis of Articulated Heavy Vehicles With Active Trailer Steering SystemsJames Kandathil JacobNo ratings yet
- Jaguar XF Brochure 1X2601910000BINEN01P - tcm635 648589 PDFDocument76 pagesJaguar XF Brochure 1X2601910000BINEN01P - tcm635 648589 PDFYogesh WadhwaNo ratings yet
- F3-DP-2019-Laszlo-Marek-Flight Control Solutions Applied For Improving Vehicle DynamicsDocument85 pagesF3-DP-2019-Laszlo-Marek-Flight Control Solutions Applied For Improving Vehicle DynamicsCaio ZavarezziNo ratings yet
- Torque Distribution Strategies for Four In-Wheel Motor Drive Electric VehiclesDocument9 pagesTorque Distribution Strategies for Four In-Wheel Motor Drive Electric VehiclesMarcel BabiiNo ratings yet
- Master ThesisDocument82 pagesMaster ThesisYash Maheshwari100% (1)
- Mitsubushi's Torque Vectoring TechnologyDocument8 pagesMitsubushi's Torque Vectoring TechnologyVaisakh N NairNo ratings yet
- TP9238 Meritor® Driver-ControlledDocument6 pagesTP9238 Meritor® Driver-ControlledLeoNo ratings yet