Professional Documents
Culture Documents
Irányításelmélet Előadás 7
Irányításelmélet Előadás 7
Uploaded by
gelesztamasOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Irányításelmélet Előadás 7
Irányításelmélet Előadás 7
Uploaded by
gelesztamasCopyright:
Available Formats
LINEÁRIS PARAMÉTERBECSLÉS
Feladat megfogalmazása: Lineáris paraméterbecslés bach-üzemmódban:
Számos mérnöki probléma átfogalmazható lineáris para- Közönséges legkisebb négyzetek (LS) módszere: Kézen-
méterbecslési feladattá, amikor is egy ismeretlen paramé- fekvő választás az ismeretlen ϑ paramétervektort a meg-
tervektorban lineáris alakot kell illeszteni a rendelkezésre figyelésekből az egyenlethibák négyzetei összegének mi-
álló zajos megfigyelésekhez. A paraméterekben lineáris nimalizálásával meghatározni (LS, least squares method):
kifejezést 1 t 1 t 2 1 2
V (ϑ , t ) = ∑ ε 2 (i ) = ∑ y (i ) − ϕ T (i )ϑ = Y − Φϑ ,
y (i ) = ϕ T (i )ϑ + ε (i ), y ∈ R m , ϑ ∈ R p , ϕ T m × p méretű 2 i =1 2 i =1 2
y (1) ϕ T (1) ε (1)
T
alakúnak feltételezzük, ahol y (i ), ϕ (i ) a megfigyelések-
Y= M , Φ= M , E = M ,
y (t ) T ε (t )
ből képezhető, ϑ az ismeretlen paramétervektor és ε (i ) ϕ (t )
ismeretlen zaj, vagy más néven ε (i ) = y (i ) − ϕ T (i )ϑ az ϑ = arg min V (ϑ , t ).
egyenlethiba (reziduál), i = 1,2, K , t . ϑ ∈R
p
Vegyük észre, hogy abban a speciális és gyakori esetben, V (ϑ , t ) konvex függvény ϑ -ban ⇒ V ′(ϑ , t ) = 0 :
amikor y ∈ R1 , pl. y (i ) egyváltozós rendszer kimenőjele Y − Φϑ
2
=< Y − Φϑ , Y − Φϑ >=
T
az i -edik mintavételi időpontban, ϕ (i ) egy sorvektor
=< Y , Y > −2 < Y ,Φϑ > + < Φϑ ,Φϑ >=
(1 × p méretű mátrix).
Két esetet fogunk vizsgálni. Az első esetben t = N fix =< Y , Y > −2 < Φ T Y ,ϑ > + < Φ T Φϑ ,ϑ >,
(off-line paraméterbecslés vagy batch-feldolgozás). A má- dV
V ′(ϑ , t ) = = −Φ T Y + Φ T Φϑ = 0
sik esetben az adatok valósidőben fokozatosan gyűlnek, t dϑ
fokozatosan nő (rekurzív paraméterbecslés).
Lantos: Dinamikus modell identifikációja 1
Ha ϑ̂ jelöli az optimális LS megoldást, akkor algebrailag 1 1
két ekvivalens alakban írható fel, amelyből a normál V (ϑ , t ) = < WE , E >= < W (Y − Φϑ ),Y − Φϑ >
egyenletnek nevezett alak numerikusan jobban 2 2
kondícionált: 1
= {< WY , Y > − < WΦϑ , Y > − < WY ,Φϑ > + < WΦϑ ,Φϑ >}
2
Φ T Φϑˆ = Φ T Y normál egyenlet, 1
= {< WY , Y > −2 < Φ T WY ,ϑ > + < Φ T WΦϑ ,ϑ >}.
ϑˆ = (Φ T Φ ) −1Φ T Y . 2
dV
Mivel a Φ T Φ mátrixnak invertálhatónak kell lennie, ez a V ′(ϑ , t ) = = −Φ T WY + Φ T WΦϑ = 0 .
kisérletekre feltételt szab, amit úgy szoktunk megfogal- dϑ
mazni, hogy a megfigyeléseknek megfelelően gerjesztő- Ha ϑ̂ jelöli az optimális WLS megoldást, akkor algebrai-
nek, ún. perzisztens gerjesztésűnek kell lenni a paraméte- lag két ekvivalens alakban írható fel, amelyből a normál
rek meghatározásához. egyenletnek nevezett alak numerikusan jobban
kondícionált:
Súlyozott legkisebb négyzetek (WLS) módszer: Bevezet-
hetünk az egyenlethibák súlyozására egy W > 0 szimmet- Φ T WΦϑˆ = Φ T WY normál egyenlet,
rikus és pozitív definit súlyozó mátrixot (WLS, weighted
least squares method), amelynek felhasználásával választ- ϑˆ = (Φ T WΦ ) −1Φ T WY .
hatjuk a W -vel súlyozott hibafüggvényt. Általában W jelenléte megnöveli a számítási időt, mivel
t = N és m = dim y esetén W mérete ( Nm) × ( Nm) . A
Mivel V (ϑ , t ) ebben az esetben is konvex és kvadratikus, módszert a rekurzív paraméterbecslésnél fogjuk felhasz-
ezért a globális minimum szükséges és elégséges feltétele nálni, ami az adaptív irányításoknál lesz fontos.
most is V ′(ϑ , t ) = 0 .
Lantos: Dinamikus modell identifikációja 2
Rekurzív paraméterbecslés: Mivel V (ϑ , t ) továbbra is konvex és kvadratikus, ezért a
Ha a ϑ paramétervektor becslés közben nem állandó, ha- globális minimum szükséges és elégséges feltétele felejtés
nem lassan fluktuálhat, akkor a régebbi egyenlethibák más esetén
paramétervektorhoz tartoztak, ezért az aktuális pillanatban Φ T ΛΦϑˆ (t ) = Φ T ΛY normál egyenlet,
már kisebb súllyal célszerű figyelembe venni azokat. Cél-
ϑˆ (t ) = (Φ T ΛΦ ) −1Φ T ΛY .
szerű tehát valósidőben biztosítani a régi hibák fokozatos
elfelejtését. Ehhez választható egy λ ∈ (0,1] felejtési té- A célunk minél egyszerűbb rekurzív összefüggés megadá-
nyező, amelynek λt−i hatványával az ε (i ) hibát megszo- sa ϑˆ (t ) számára. Vezessük ezért be a
−1
rozzuk. Ha 0 < λ < 1 , akkor λt−i annál kisebb, minél na- −1 t t −i
gyobb a t − i kitevő, azaz minél régebbi az i -edik pilla-
T
P (t ) := [Φ ΛΦ ] = ∑ λ ϕ (i )ϕ T (i )
i =1
nathoz tartozó megfigyelés a t -edik pillanatbelihez képest.
jelölést, akkor
Ha λ = 1 , akkor nincs felejtés. −1
t −1
1 t t −i 2 P (t ) = ∑ λ ⋅ λt −1− iϕ (i )ϕ T (i ) + ϕ (t )ϕ T (t )
V (ϑ , t ) = ∑
2 i =1
λ y (i) − ϕ T (i)ϑ = i =1
1 t [
= λP −1 (t − 1) + ϕ (t )ϕ T (t ) ]
−1
= ∑
2 i =1
< λt −i [ y (i ) − ϕ T (i )ϑ ], y (i ) − ϕ T (i )ϑ > .
Alkalmazzuk az inverz mátrix lemmát
Ha m = dim y , akkor ez megfelel a korábban már tárgyalt
esetnek, ahol a W súlyozó mátrix blokkdiagonális: ( A + BCD) −1 = A −1 − A −1 B(C −1 + DA −1 B) −1 DA −1
Λ := W = diag (λt −1 I m , K , λ1 I m , λ 0 I m ) . A := λP −1 (t − 1) , B := ϕ (t ) , C := I , D := ϕ T (t )
választás mellett, akkor
Speciálisan ha dim y = 1 , akkor Λ := diag (λt −1 , K , λ ,1) .
Lantos: Dinamikus modell identifikációja 3
1 1
P (t ) = P (t − 1) − P (t − 1)ϕ (t ) × 1 −1
λ λ ϑˆ (t ) = P (t ) λ
λ
[ ]
P (t ) − ϕ (t )ϕ T (t ) ϑˆ (t − 1) + ϕ (t ) y (t ) ⇒
−1
T 1 T 1
I + ϕ (t ) P (t − 1)ϕ (t ) ϕ (t ) P (t − 1)
λ λ ϑˆ (t ) = ϑˆ (t − 1) + P(t )ϕ (t )[ y (t ) − ϕ T (t )ϑˆ (t − 1)].
ahonnan átalakítások után kapjuk, hogy Ha bevezetjük a K (t ) := P(t )ϕ (t ) jelölést, akkor
1 1
P (t ) = {P (t − 1) − P(t − 1)ϕ (t ) × K (t ) = {P(t − 1) − P (t − 1)ϕ (t ) ×
λ λ
[λI + ϕ T (t ) P(t − 1)ϕ (t )]−1ϕ T (t ) P(t − 1)} [λI + ϕ T (t ) P (t − 1)ϕ (t )]−1ϕ T (t ) P (t − 1)}ϕ (t )
ahonnan kapjuk a rekuív paraméterbecslés szabályozás-
Tekintsük ezután a paramétervektor meghatározását:
technikában szokásos alakját:
t −1
ϑˆ (t ) = P (t ) λ ∑ λt −1−i ϕ (i ) y (i ) + ϕ (t ) y (t ) , K (t ) = P(t − 1)ϕ (t )[λI + ϕ T (t ) P(t − 1)ϕ (t )]−1
i =1
ahonnan P (t ) = [ I − K (t )ϕ T (t )]P(t − 1) / λ
t −1 ϑˆ (t ) = ϑˆ (t − 1) + K (t )[ y (t ) − ϕ T (t )ϑˆ (t − 1)]
ϑˆ (t − 1) = P(t − 1) ∑ λt −1− iϕ (i ) y (i ) ⇒
i =1 Itt yˆ (t ) = ϕ T (t )ϑˆ (t − 1) a kimenet predikciója a
t −1 paramétervektor előző értéke mellett, ε (t ) = y (t ) − yˆ (t )
∑ λt −1− iϕ (i) y (i) = P −1 (t − 1)ϑˆ (t − 1) pedig a reziduál. Az előző becslést a K (t ) -vel felerősített
i =1
reziduállal kell korrigálni. A P (0) és ϑ̂ (0) induló értékek
1
−1
P (t − 1) =
λ
[P −1 T
]
(t ) − ϕ (t )ϕ (t ) . meghatározására szóba jöhet egy előzetes off-line paramé-
terbecslés.
Visszahelyettesítve ezeket a kifejezéseket kapjuk, hogy
Lantos: Dinamikus modell identifikációja 4
NEMLINEÁRIS PARAMÉTERBECSLÉS
A lineáris paraméterbecslési feladatnál a t -edik pillanat- dh(ϑ , t ) dh(ϑ , t )
y (t ) ≈ h(ϑˆ (t − 1), t ) − ϑˆ (t − 1) + ϑ0
ban y (t ) = ϕ T (t )ϑ0 kapcsolta össze a megfigyeléseket, dϑ ϑˆ (t −1) dϑ ϑˆ (t −1)
ahol ϕ T (t ) alakját analitikusan ismertük, de a
Bevezetve az
parmétervektor ϑ0 valódi értéke ismeretlen volt, értékét
paraméterbecsléssel határoztuk meg. dh(ϑ , t )
y (t ) := y (t ) − h(ϑˆ (t − 1), t ) + ϑˆ (t − 1) ,
Általánosítás (nemlineáris paraméterbecslési feladat): dϑ ϑˆ (t −1)
A megfigyeléseket a t -edik pillanatban az dh(ϑ , t ) dh(ϑˆ (t − 1), t )
ϕ T (t ) := =
dϑ ϑˆ (t −1) dϑ
y (t ) = h(ϑ0 , t )
jelölést, a nemlineáris paraméterbecslési feladat lokális
analitikusan ismert nemlineáris modell kapcsolja össze,
benne a ϑ0 ismeretlen paraméter becslését keressük. linearizálással és a fenti jelölésekkel az y (t ) = ϕ T (t )ϑ0 li-
neáris paraméterbecslési alapfeladatra transzformálható.
Tegyük fel, hogy már rendelkezésre áll valamilyen
ϑˆ (t − 1) becslés, akkor kézenfekvő ϑˆ (t − 1) körül a h(ϑ , t ) Következmény:
függvényt Taylor-sorba fejteni, és a lineáris taggal közelí- A nemlineáris paraméterbecslési feladat lokális
teni a nemlineáris függvényt: linearizálással visszavezethető a rekurzív lineáris paramé-
dh(ϑ , t ) terbecslésre. Ezért a lineáris paraméterbecslés rekurzív
h(ϑ0 , t ) ≈ h(ϑˆ (t − 1), t ) + (ϑ0 − ϑˆ (t − 1)), képlete felhasználható a becslés frissítésére.
dϑ ϑˆ (t −1)
Lantos: Dinamikus modell identifikációja 5
Tekintsük ebből a következő kifejezést:
dh(ϑ , t ) dh(ϑ , t )
y (t ) − ϕ T (t )ϑˆ (t − 1) := y (t ) − h(ϑˆ (t − 1), t ) + ϑˆ (t − 1) − ϑˆ(t − 1) =
dϑ ϑˆ (t −1) dϑ ϑˆ (t −1)
= y (t ) − h(ϑˆ (t − 1), t ).
Jól látható, hogy a reziduált közvetlenül a h(ϑ , t ) nemlineáris modell alapján célszerű számítani és a bevezetett korrekció
elvégzésére nincs szükség.
A nemlineáris paraméterbecslésre (lokális linearizálást alkalmazva) a következő rekurzív alakot nyertük:
dh(ϑ , t )
ϕ T (t ) :=
dϑ ϑˆ (t −1)
1
P(t ) = {P(t − 1) − P(t − 1)ϕ (t ) [λI + ϕ T (t ) P(t − 1)ϕ (t )]−1ϕ T (t ) P(t − 1)}
λ
ϑˆ(t ) = ϑˆ (t − 1) + P(t )ϕ (t )[ y (t ) − h(ϑˆ(t − 1), t )]
t := t + 1.
Lantos: Dinamikus modell identifikációja 6
K-LÉPÉSSEL ELŐRETARTÓ PREDIKTOR
Végtelen sorozatok l2 tere: Korlátos stabil operátorok és inverzük l2-ben:
Jelölje l2 azon (komplex) x = {K , x −2 , x −1 , x 0 , x1 , x 2 , K} Az A ∈ K (l 2 → l 2 ) operátort korlátos (stabil) lineáris ope-
2 2 rátornak nevezzük, ha létezik olyan véges c > 0 szám,
sorozatok terét, melyekre teljesül x = ∑ii ==∞−∞ xi < ∞.
hogy minden x ∈ l 2 esetén Ax ≤ c x . Az A operátor nor-
Ebben a térben skalárszorzatot definiálhatunk
mája a feltételt kielégítő c értékek infimuma:
< x, y >= ∑i = −∞ xi ~
i =∞
y i módon (“~” jelöli a konjugáltat),
A = inf {c > 0 : Ax ≤ c x , ∀x ∈ l 2 } < ∞,
2
amely mellett x =< x, x > és l2 egy Hilbert-tér (végte- Ax
lendimenziós lineáris normált tér, melyben a norma A = sup = sup Ax = sup Ax < ∞.
x ≠0 x x ≤1 x =1
skalárszorzattal van definiálva, és amelyben minden
Cauchy-sorozatnak van határértéke). Legyen a H ( z ) = h0 + h1 z −1 + h2 z −2 + L sor konvergens a
z komplex változóban ∀ z −1 < 1 ⇒ ∀ z > 1 esetén, pl. telje-
Az x sorozatot jelölje x(t ), ahol x(−1) = x−1 , x(0) = x0 ,
∞
x(1) = x1 , stb. Vezessük be a q és q −1 shift-operátorokat, süljön ∑ hi < ∞. Pl. H ( z ) = B ( z ) / A( z ), ahol B( z ), A( z )
valamint az i identikus operátort: i=0
polinomok és A(z ) stabil (az A(z ) polinom z i gyökeire
q : l2 → l2 , qx(t ) = x(t + 1); teljesül z i < 1 ). Ilyenkor H (q) ∈ K (l2 → l2 ), mert
q : l 2 → l 2 , q −1 x(t ) = x(t − 1);
−1
H ( q ) x(t ) = h0 x(t ) + h1 x(t − 1) + h2 x(t − 2) + L ,
i : l2 → l2 , ix(t ) = x(t ); ∞
−1 −1 H (q ) x(t ) ≤ h0 x + h1 x + h2 x + L = ∑ hi x < ∞.
qq = q q = i.
i =0
−1
Világos, hogy ha B(z ) is stabil, akkor H (q) is korlátos.
Lantos: Dinamikus modell identifikációja 7
Zajjal terhelt diszkrétidejű lineáris rendszer: Bontsuk két részre a H (q) operátort:
~
H (q ) = H k ( q ) + q − k H k ( q ),
e(t )
H (q ) = 1 + h1q −1 + h2 q −2 + L ,
H k ( q ) = 1 + h1q −1 + L + hk −1q −( k −1) ,
H (q) ~
H k ( q ) = hk + hk +1q −1 + hk + 2 q −2 + L
Vegyük észre, hogy e(t ) kiszámítható, ha y (t ), u (t ) mért
u (t ) + y(t ) értéke rendelkezésre áll (de csak ekkor):
+
G (q) e(t ) = H −1 ( q )[ y (t ) − G (q )u (t )] .
Átalakítások:
y (t ) = G ( q )u (t ) + H ( q )e(t )
y (t + k ) = G ( q )u (t + k ) + H (q )e(t + k ) =
~
A zajos rendszer modelljében G (q), H (q) és H −1 (q) stabil = G ( q )u (t + k ) + H k ( q ) e(t + k ) + H k ( q ) e(t ) =
szűrők, q, q −1 shift-operátorok, e(t ) fehér zaj. = G ( q )u (t + k ) + H k ( q ) e(t + k ) +
~
+ H k ( q ) H −1 ( q )[ y (t ) − G ( q )u (t )],
Rendelkezésre álló megfigyelések:
[ y (t + k ) − yˆ}2 = [ H k (q) e(t + k )]2 +
y −t ∞ = {K , y (t − 2), y (t − 1), y (t )}
+2[ H k (q) e(t + k )]
u −t +∞k = {K , u (t + k − 2), u (t + k − 1), u (t + k )} ~
× {G (q)u (t + k ) + H k (q) H −1 (q)[ y (t ) − G (q)u (t )] − yˆ} +
Optimális becslés: yˆ (t + k y −t ∞ , u −t +∞k ) = yˆ (t + k t ) ~
+{G (q)u (t + k ) + H k (q) H −1 (q)[ y (t ) − G (q)u (t )] − yˆ}2 .
Cél: E[ y (t + k ) − yˆ ] 2 → min
Lantos: Dinamikus modell identifikációja 8
Világos, hogy Optimális k-lépéssel előretartó prediktor:
H k (q)e(t + k ) = e(t + k ) + h1e(t + k − 1) + L + hk −1e(t + 1) ~
yˆ (t + k t ) = G (q)u (t + k ) + H k (q) H −1 (q)[ y (t ) − G (q)u (t )] =
az e(t ) bemeneti zajnak csak t utáni értékeit, míg ~ ~
= [1 − q − k H k (q) H −1 (q )]G (q)u (t + k ) + H k (q) H −1 (q) y (t )
~
H k (q) H −1 (q)[ y (t ) − G (q)u (t )] Innen következik az időpontok cseréjével, hogy
~
az u (t ) és y (t ) megfigyeléseknek csak t -beli és azt meg- yˆ (t t − k ) = [1 − q − k H k (q ) H −1 ( q)]G (q)u (t )
előző értékeit tartalmazza. ~
+ q − k H k (q ) H −1 (q) y (t )
Korrelációs feltevés:
Speciálisan k = 1 esetén:
~
i) H k (q) e(t + k ) és H k (q) H −1 (q)[ y (t ) − G (q) u (t )] füg- ~
H k (q) = 1 , H k (q) = q[ H (q) − 1] ,
getlenek.
~
H k (q) H −1 (q) = q[ H (q) − 1]H −1 (q ) = q[1 − H −1 (q)] ,
ii) H k (q) e(t + k ) és G (q)u (t + k ) függetlenek.
~
q − k H k (q) H −1 (q) = [1 − H −1 (q)] ,
iii) E e(t ) = 0, ∀t esetén. ~
1 − q − k H k (q) H −1 (q) = H −1 (q) ,
Célfüggvény a feltevések teljesülésekor:
Optimális 1-lépéssel előretartó prediktor:
2 2
E[ y (t + k ) − yˆ ] = E[ H k (q)e(t + k )] +
yˆ (t t − 1) = H −1 (q)G (q)u (t ) + [1 − H −1 (q)] y (t )
~
+ E{G (q )u (t + k ) + H k (q) H −1 (q)[ y (t ) − G (q)u (t )] − yˆ}2 . ε (t ) := y (t ) − yˆ (t t − 1) = H −1 (q)[ y (t ) − G (q)u (t )] (reziduál)
Mivel a jobb oldalon az első tag csak jövőbeli értékeket
tartalmaz, ezért nem befolyásolható. A második tag pozi- Az eredményeket preditív irányításnál (k ≠ 1) és identifi-
tív, amely minimumát akkor éri el, amikor nullává válik. kációnál (k = 1) alkalmazzuk.
Lantos: Dinamikus modell identifikációja 9
DISZKRÉTIDEJŰ LINEÁRIS RENDSZERMODELLEK
Feltevés:
A MATLAB-ra épülő és Ljung által kifejlesztett System
e(t ) Gauss-féle fehér zaj (zajbemenet), Identification Toolbox (a továbbiakban IDENT) különféle
y (t ) a vizsgált sztochasztikus folyamat (kimenet), rendszermodellek identifikációját teszi lehetővé az operá-
u (t ) egy opcionális jel (hasznos bemenet) tor tartományban és az állapottérben mind folytonos, mind
pedig diszkrét időben.
d ≥ 0 egész (holtidő).
Az időt a mintavételi időre normalizáltnak tekintjük Ezek közül a diszkrétidejű egyváltozós (SISO) rendszerek
(formálisan T = 1 , a megfigyelhető időpontok halmaza modelljeire fogunk koncentrálni diszkrét időben.
T = {K ,−2,−1, 0, 1, 2, K} ).
A rendszermodellek elnevezéseiben AR autoregresszív
Alapmodellek: (auto regressive), MA mozgóátlag (moving average), X
külső bemenőjelet tartalmazó (exegenous signal), OE ki-
Mozgóátlag (MA, moving average) folyamat:
menetre redukált additív zajt (output error) tartalmazó, BJ
y (t ) = e(t ) + c1e(t − 1) + K + c nc e(t − nc ). Box-Jenkins modell szerinti és PEM általános lineáris pa-
raméterbecslési modell (parameter estimation model) sze-
Autoregresszív (AR, autoregressive) folyamat: rinti folyamatokra utal.
y (t ) + a1 y (t − 1) + K + a na y (t − n a ) = e(t ). Az IDENT különféle diszkrétidejű lineáris rendszermodel-
lek választását teszi lehetővé. Az elnevezések követik az
ARMA folyamat: alapmodellek neveit, az X (exogeneous signal) a külső
gerjesztő jelre, azaz a rendszer bemenőjelére utal.
y (t ) + a1 y (t − 1) + K + an a y (t − na ) =
= e(t ) + c1e(t − 1) + K + cn c e(t − nc ).
Lantos: Dinamikus modell identifikációja 10
(AR) A( q) y (t ) = e(t ) ,
Azért, hogy a zajmentes rendszer erősítése tetszőleges le-
(ARX) A( q) y (t ) = B( q)u (t − n k ) + e(t ) , hessen, a B (q) polinom már nem lehet 1 vezető együttha-
tójú:
(ARMAX) A( q) y (t ) = B(q)u (t − n k ) + C (q)e(t ) ,
B(q) B (q) = b1 + b2 q −1 + L + bnb q − nb +1 .
(OE) y (t ) = u (t − n k ) + e(t ) ,
F (q)
B(q) C (q) Az IDENT-ben használt késleltetés vagy “holtidő” (delay)
(BJ) y (t ) = u (t − n k ) + e(t ) , elnevezéssel kapcsolatban meg kell jegyezni, hogy pl. az
F (q) D(q)
A /{(1 + sT1 )(1 + sT2 )} kéttárolós tag, bemenetén DAC,
B (q) C (q) kimenetén ADC átalakítóval a
(PEM) A( q) y (t ) = u (t − n k ) + e(t ) .
F (q) D(q)
Az egyes modellek felfoghatók a PEM modell speciális b1 q −1 + b2 q −2 b1 + b2 q −1
−1 −2
= −1 −2
q −1
eseteinek, ahol u (t ) a hasznos külső bemenet, e(t ) fehér 1 + a1 q + a2 q 1 + a1q + a2 q
zaj, y (t ) a zajjal terhelt kimenet, továbbá
A( q), B(q), C (q), D(q ), F (q ) polinomok a q −1 shift- stabil operátorral jellemezhető, ami nb = 2 paraméter-
operátorban és az IDENT szóhasználata szerint nk felel számnak és nk = 1 (!) “holtidőnek” felel meg.
meg a késleltetésnek vagy “holtidőnek” ( nk T , ahol T a
A zajcsatorna erősítése az e(t ) ∈ N (0, σ ) fehér zaj meg-
mintavételi idő). Az A( q), C (q), D( q), F ( q) polinomok 1
felelőre választott szórásával vehető figyelembe. A szórás
vezető együtthatójú (monic) polinimok a q −1 shift-
helyett az IDENT a λ := σ 2 paramétert használja.
operátorban, pl.
A(q) = 1 + a1 q −1 + L + a na q − na .
Lantos: Dinamikus modell identifikációja 11
A MATLAB konvenciója szerint az A(q), K , F (q) poli-
th = poly2th ( A, B, C , D, F , λ , T )
nomokat együtthatóikkal kell megadni a q (!) hatványai-
nak csökkenő sorrendjében, tehát A(q) esetén az függvényhívás hatására felépíti és th -ban tárolja a rend-
szert jellemző adatstruktúrát. A hátul álló C , D, F , λ , T pa-
A = [1 a1 a 2 K a na ] raméterek elhagyhatók híváskor, ilyenkor értékük 1 lesz.
Szimulációs vizsgálatokhoz ezután zajos vagy zajmentes
sorvektor formájában. Speciális megkötés, hogy n k és B kimenetet generálhatunk ismert u és e bemenőjel és zaj
egyszerre kerül megadásra olymódon, hogy B elején n k sorozatok esetén az IDENT
darab vezető nullát szúrunk be. Pl. mintavételezett y = idsim ([u e}, th)
kéttárolós tag és ARX modell esetén a diszkrétidejű rend-
szermodell y = idsim (u, th)
függvényhívásaival. A bemenőjelek sorozatait oszlopvek-
A( q) y (t ) = B (q)u (t ) + e(t ) , torok formájában kell megadni, a kimenőjel oszlopvekto-
melyet az rokban keletkezik. Bemenőjeleket generálhatunk például a
A = [1 a1 a 2 ] MATLAB rand és sign függvényei felhasználásával.
B = [0 b1 b2 ] Ismeretlen rendszer identifikációja esetén mérjük az
u (t ) bemenet és a zajos y (t ) kimenet értékeit, ezeket ösz-
sorvektorokkal és a λ szórásnégyzettel jellemezhetünk. szegyűjtjük az u és y oszlopvektorokban, felépítjük a
A rendszermodell speciális “th” adatstruktúrával jelle-
megfigyelésekből álló és két oszloppal rendelkező
mezhető. Ha a rendszer ismert (a polinomok együtthatói és
a fehér zaj szórásnégyzete numerikusan ismertek, mert z = [ y u ] mátrixot, megválasztjuk a rendszermodellt és az
például ismert rendszeren akarunk jeleket előállítani szi- abban szereplő polinomok fokszámait, megválasztjuk a
mulációs vizsgálatokhoz, pl. az identifikációs módszerek holtidő értékét, és elvégezzük az identifikációt az IDENT
ellenőrzése céljából egy etalon rendszeren), akkor az szolgáltatásaival.
IDENT a
Lantos: Dinamikus modell identifikációja 12
Az identifikációs módszerek feladata, hogy meghatározza PEM esetére megadott sorrendben szerepeltetendők nn -
a polinomok valamilyen értelemben optimális paramétere- ben:
it, miközben az e(t ) zaj értékei ismeretlenek. Erre a célra (AR) nn = na
a legkisebb négyzetek módszere (LS, least squares (ARX) nn = [ na nb nk ]
method) vagy ennél általánosabb paraméterbecslési tech- (IV4) nn = [ na nb nk ]
nikák, a zaj fehérítését megcélzó segédváltozós (IV, (ARMAX) nn = [ na nb nc nk ]
instrumental variables) módszer, numerikus optimum ke-
resés, vagy esetleg ezek kombinációja alkalmazható. Az (OE) nn = [nb n f n k ]
IDENT a rendszermodell típusától függően választja meg (BJ) nn = [nb nc nd n f nk ]
az identifikációhoz használt numerikus módszert. A se- (PEM) nn = [ n a nb nc n d n f n k ] .
gédváltozós módszer (IV) csak ARX modell esetén alkal-
mazható. A rendszermodell polinomjaiban szereplő Az IDENT identifikációs módszerei az identifikáció
nemtriviális paraméterek számát, ami B (q) kivételével a eredményét (az identifikált paramétereket és λ értékét is
polinom fokszáma, egy sorvektorban kell megadni, amely tartalmazó) megválasztható nevű th struktúrában helyezik
pl. PEM modell esetén az el:
nn = [ na nb nc nd n f nk ] (AR) thar = ar ( y, nn)
sorvektort jelenti. A 0 fokszám megengedett, pl. na = 0 (ARX) tharx = arx ( z , nn)
esetén A(q) = 1 , tehát hatástalan. A PEM modell ekkor BJ (IV4) thiv 4 = iv4( z , nn)
modellé fajul, ami az eltérő numerikus módszerek miatt (ARMAX) tharmax = armax ( z , nn)
nem jelenti azt, hogy ebben az esetben a PEM és a BJ (OE) thoe = oe ( z , nn)
identifikáció egyforma eredményre vezet. Ha a választott (BJ) thbj = bj( z , nn)
rendszermodell nem tartalmazza az összes A(q), K , F (q)
(PEM) thpem = pem ( z , nn) .
polinomot, akkor a hiányzó polinom fokszámát tilos sze-
repeltetni nn -ben. A megmaradó fokszámok mindig a
Lantos: Dinamikus modell identifikációja 13
Az identifikált rendszer zajmentes válasza, vagy szimulá- Az IDENT toolbox a továbbiakban algoritmus szinten is
ciós vizsgálatoknál az ismert e(t ) zajsorozat figyelembe- részletesen tárgyalt diszkrétidejű paraméter identifikációs
vételével a zajos rendszer válasza is meghatározható, pl. módszereken kívül lehetővé teszi még folytonosidejű line-
PEM modell esetén: áris állapotegyenletek paramétereinek becslését is speciális
zajstruktúrák esetén.
y = idsim (u , thpem)
y = idsim ([ue], thpem). Szolgáltatásai között szerepelnek a paraméterbecslés re-
kurzív realizációi is, amelyek adaptív irányításoknál jelen-
Az identifikáció eredménye az tősek.
idplot ([ y u ])
Ezeken túlmenően lehetőség van nemparaméteres identifi-
függvényhívással felrajzolható. A polinomok együtthatói kációra, valamint a korrelációs függvények és a spektru-
kinyerhetők, pl. PEM modell esetén az mok számítására is. Ez utóbbi számítások algoritmusai
gyors Fourier-transzformáción (FFT, fast Fourier-
[ A, B, C , D, F ] = th2poly (thpem)
transformation) és az FFT periodicitása miatt alkalmasan
függvényhívással. A mérési eredményeket és az identifi- választott ablakozási technikán alapulnak.
káció eredményeit összerajzolhatjuk és vizuálisan össze-
hasonlíthatjuk a MATLAB általános szolgáltatásaival Az IDENT toolbox alagoritmusai alapjául szolgáló elmélet
(plot, stb.). bővebben Ljung: System identification: Theory for the
user könyvében található meg.
Megjegyezzük, hogy több itt szereplő függvénynek létezik
általánosabb paraméterezése is IDENT-ben, továbbá több-
változós (MIMO) rendszerek identifikációja is lehetséges.
Lantos: Dinamikus modell identifikációja 14
Identifikáció és paraméterbecslés kapcsolata A kérdés az, hogyan kell a Z N -ben lévő információ
Tételezük fel, hogy kiválasztottunk egy bizonyos M mo- alapján a megfelelő ϑ̂ N parmétervektor, és a megfelelő
dell típust, ahol ezen belül az egyes M (ϑ ) modellek a ϑ M (ϑˆ ) modellt kiszelektálni az M = {M (ϑ ) :ϑ ∈ D }
N ∗ M
paramétervektorral paraméterezhetők, ahol a paraméter- rendszerosztályban:
vektornak esetleg bizonyos feltételeket kell kielégítenie Z N → ϑ̂ N ∈ D M .
(stabil modell, stb.): ϑ ∈ DM ⊂ R p . Világos, hogy minden
modell lehetőséget kínál a jóslásra, speciálisan ha a mo- Egy ilyen leképzést modell-identifikációs célú paraméter-
dellosztály becslésnek nevezünk. Olyan modellt keresünk, amely “le-
írja” az adatokat, és úgy gondolkozunk, hogy a modell lé-
y (t ) = G (q, ϑ )u (t ) + H ( q, ϑ )e(t ) , nyege a modell predikciós képessége. Ez azt jelenti, hogy
a “jó” modell kiválasztásához a következőképp kell eljár-
akkor a jóslásra alkalmazható az ni:
yˆ (t t − 1) = H −1 ( q,ϑ )G (q,ϑ )u (t ) + [1 − H −1 (q,ϑ )] y (t ) A Z t -ben lévő információ alapján meghatározzuk az
ε (t , ϑ ) predikciós hibát. A t = N időpontban úgy választ-
1-lépéssel előretartó prediktor, amely mellett a predikciós
hiba a következő lesz: juk meg ϑ̂ értékét, hogy az ε (t , ϑˆ ), t = 1,2, K , N
N N
predikciós hibák a lehető legkisebbek legyenek.
ε (t , ϑ ) = H −1 ( q, ϑ )[ y (t ) − G (q, ϑ )u (t )]
Tisztázni kell, mit értünk “kicsi” alatt. A predikciós hi-
A paraméterbecsléshez rendelkezésre álló adat: basorozat egy vektor R N -ben, ezért hibáját a norma négy-
zetével jellemezzük. A korrelációs feltételek javítása érde-
Z N = { y (1), u (1), y ( 2), u (2), K y ( N ), u ( N )}
kében azonban célszerű előbb a predikciós hibasorozatot
egy stabil L(q ) lineáris szűrőn keresztülküldeni.
Lantos: Dinamikus modell identifikációja 15
A predikciós hiba és deriváltjai: szerint azonos − ψ első deriváltjával a ϑ vektor szerint,
A predikciós hiba jellemzésére választható ami mátrix. Másrészt
( −ψε ) ′ = −ψ ′ε − ψε ′ = −ψ ′ε + ψψ T ⇒
1 N 1 2
VN (ϑ , Z N ) = ∑ ε (t ,ϑ ) . 1 N 1 N
N t =1 2 V N′′ (ϑ , Z N ) = − ∑
N t =1
ψ ′(t , ϑ )ε (t , ϑ ) + ∑
N t =1
ψ (t , ϑ )ψ T (t , ϑ )
A ϑ̂ N becslést minimalizálással definiáljuk: és mivel ε (t , ϑ ) az optimum közelében már kicsi, ezért az
ϑˆ N = arg min V N (ϑ , Z N ). optimum közelében a V N′′ (ϑ , Z N ) Hess-mátrix közelíthető
ϑ∈D M a jobb oldalon álló kifejezés második tagjával:
Az ARX modell esetén az optimum analitikusan is megha-
tározható, ha nem korlátozzuk a modellosztályt 1 N
V N′′ (ϑ , Z N ) ≈ H N (ϑ ) := ∑ψ (t , ϑ )ψ T (t , ϑ ) .
( DM = R p ), más esetben optimumkereső eljárást kell al- N t =1
N
kalmazni. Foglalkozzunk ezért V N (ϑ , Z ) deriváltjainak A közelítésre azért van szükség, mert ψ ′(t , ϑ ) számítására
meghatározásával. nem áll rendelkezésre használható kifejezés. A Hess-
d 1 N 1 2 1 N d mátrix közelítése H N (ϑ ) -val lehetővé teszi a jó konver-
VN′ (ϑ , Z N ) = ∑
dϑ N t =1 2
ε (t , ϑ ) = ∑ [ε (t ,ϑ )]ε (t ,ϑ ),
N t =1 dϑ gencia tulajdonságú kvázi Newton-módszer alkalmazását,
d d amely a konjugált gradiens módszernél általában jobb ha-
ψ (t , ϑ ) = − [ε (t , ϑ )] = [ yˆ (t , ϑ )],
dϑ dϑ tásfokú.
1 N A fő problémát az optimum keresésnél az okozza, hogy
V N′ (ϑ , Z N ) = − ∑ψ (t , ϑ )ε (t , ϑ ). több lokális optimum lehet, ezért fontos a jó kezdeti érték.
N t =1
Tekintsük ezután a második derivált (Hess-mátrix) megha- A továbbiakban nem foglalkozunk a holtidővel, mert is-
tározását. Mivel ε skalár és a ϑ vektor szerinti első deri- mert nk esetén u (t ) értékeinek előzetesen elvégezhető
váltja a − ψ vektor, ezért a második deriváltja a ϑ vektor eltolásával a holtidőt előre figyelembe lehet venni.
Lantos: Dinamikus modell identifikációja 16
ARX MODELL IDENTIFIKÁCIÓJA
ARX modell identifikációja LS módszerrel:
amely egy lineáris paraméterbecslési feladat, amelynek
B(q ) 1 megoldása a V N′ (ϑ , Z N ) = 0 feltételből számítható:
y (t ) = u (t ) + e(t ) =: G (q )u (t ) + H (q )e(t ) ,
A(q ) A( q)
B (q) 1 N 1 N
yˆ (t , ϑ ) = A( q) u (t ) + [1 − A( q)] y (t ) = V N′ (ϑ , Z N ) = −
N
∑ ϕ (t ) y (t ) + N ∑ ϕ (t )ϕ T (t )ϑ = 0 ,
A(q) t =1 t =1
−1
= [1 − A(q )] y (t ) + B (q)u (t ), 1 N 1 N
ami a ϑˆ NLS := ∑ ϕ (t )ϕ (t )
T
∑ ϕ (t ) y (t ) .
N t =1 N t =1
ϕ (t ) := [− y (t − 1) K − y (t − n a ) u (t ) K u (t − nb + 1)]T , Célszerű bevezetni az
ϑ := (a1 K a na b1 K bnb ) T
1 N
R( N ) := ∑ ϕ (t )ϕ T (t ) ,
jelölésekkel a ϑ paraméterben lineáris N t =1
yˆ (t , ϑ ) = ϕ T (t )ϑ 1 N
h( N ) :=
N
∑ ϕ (t ) y (t )
t =1
prediktort eredményezi. A predikciós hiba és a minimali-
zálandó kritérium ekkor jelöléseket, ahol R (N ) mátrix és h(N ) vektor, amellyel az
ε (t , ϑ ) = y (t ) − ϕ T (t )ϑ , LS becslés
1 N 1 2 ϑˆ NLS = [ R ( N )] −1 h( N )
V N (ϑ , Z N ) = ∑ y (t ) − ϕ T
(t )ϑ , alakú lesz.
N t =1 2
Lantos: Dinamikus modell identifikációja 17
Ha a megfigyelt adatokat a ϑ0 paraméterhez tartozó zajos ARX modell identifikációja IV módszerrel:
y (t ) = ϕ T (t )ϑ0 + ν 0 (t ) A korreláció csökkentésére próbálkozzunk meg ϕ (t ) le-
rendszer generálta, akkor cserélésével egy alkalmasan választott ξ (t ) jelre, az ún.
1 N segédváltozóra (IV, instrumental variable) a becslés képle-
ϑˆ NLS = [ R( N )] −1 ∑ ϕ (t )[ϕ T (t )ϑ0 + ν 0 (t )] =
N t =1 tének alkalmasan megválasztott helyén.
1 N
Ha a valódi rendszer y (t ) = ϕ T (t )ϑ0 + ν 0 (t ) , akkor
= ϑ0 + [ R ( N )] −1 ∑ ϕ (t )ν 0 (t ).
N t =1
ν 0 (t ) = y (t ) − ϕ T (t )ϑ0 , ezért az LS becslés a következő
A ϑ̂ NLS
becsléstől elvárjuk, hogy alakban is megfogalmazható:
i) legyen ϑ0 közelében,
ii) konvergáljon ϑ0 -hoz, ha N → ∞ . 1 N
ϑˆ NLS = sol ∑ ϕ (t )[ y (t ) − ϕ T (t )ϑ ] = 0 ,
Ha jelek stacionáriusak és ergodikusak (a jel bármelyik N t =1
elég hosszú reprezentációjának átlagai jól közelítik a való-
színűségi átlagokat), akkor ahol “sol” a megoldás (solution) szóra utal. Ennek analó-
giájára olyan ξ (t ) segédváltozót keresünk, amelyre telje-
R ( N ) → R ∗ = Rϕϕ autokorrelációs függvény,
sül
h( N ) → h ∗ = Rϕν 0 keresztkorrelációs függvény.
1 N
Ekkor annak feltétele, hogy az LS becslés konzisztens le- ϑˆ NIV = sol ∑ ξ (t )[ y (t ) − ϕ T (t )ϑ ] = 0 .
gyen, azaz teljesüljön ϑˆ NLS → ϑ0 , ahol ϑ0 a valódi para- N t =1
méter (amely a valódi rendszerhez tartozik), ekvivalens az Ekkor az IV becslés alakja a következő lesz:
Rψν 0 = 0 feltétellel, vagyis ekkor a ϕ (t ) megfigyelések-
−1
nek és a ν 0 (t ) zajnak korrelálatlannak kell lenniük. 1 N 1 N
ϑˆ NIV := ∑ ξ (t )ϕ (t )
T
∑ ξ (t ) y (t ) .
N t =1 N t =1
Lantos: Dinamikus modell identifikációja 18
IV4 algoritmus: és írjunk elő egy na + nb fokszámű AR modellt wˆ N( 2) (t )
számára (amely nem más, mint a második modell esetén
1. Írjuk fel a modell struktúrát az yˆ (t , ϑ ) = ϕ T (t )ϑ lineá- fellépő egyenlethiba):
ris regressziós alakban, és határozzuk meg ϑ becslését
LS módszerrel. Jelölje ϑˆ N(1) az így kapott becsült para- L(q) wˆ N( 2) (t ) = e(t ) .
métert és Gˆ (1) (q) a hozzátartozó diszkrétidejű átviteli
N Határozzuk meg L(q) becslését az LS módszerrel (ek-
függvényt: kor ϕ -ben hiányoznak az u -hoz tartozó tagok). Jelölje
Gˆ N(1) ( q) = Bˆ N(1) (q) / Aˆ N(1) (q) . az LS becslés eredményét Lˆ N ( q) .
2. Képezzük a segédváltozókat az 4. Képezzünk új segédváltozókat az
x (1) (t ) = Gˆ N(1) (q)u (t ) x ( 2) (t ) = Gˆ N( 2) ( q)u (t )
ξ (1) (t ) = [ − x (1) (t − 1) K − x (1) (t − n a ) u (t ) K u (t − nb + 1)]T ξ ( 2) (t ) = Lˆ N (q) ×
[− x ( 2) (t − 1) K − x ( 2) (t − na ) u (t ) K u (t − nb + 1)]T
szabály szerint, és határozzuk meg a hozzátartozó
ϑˆ N( 2) := ϑˆ NIV IV becslést. Jelölje a ϑˆ N( 2) -höz tartozó szabály szerint. Alkalmazzuk az Lˆ N (q ) előszűrőt és az
diszkrétidejű átviteli függvényt új segédváltozókat a végső IV becslés meghatározására:
Gˆ N( 2) (q) = Bˆ N( 2) (q) / Aˆ N( 2) (q) .
ϕ F (t ) := Lˆ N (q)ϕ (t ), y F (t ) := Lˆ N (q) y (t ),
3. Legyen −1
ˆ 1 N ( 2) 1 N ( 2)
ϑ N := ∑ ξ (t )ϕ FT (t ) ∑ξ (t ) y F (t )
wˆ N( 2) (t ) := Aˆ N( 2) (q ) y (t ) − Bˆ N( 2) ( q)u (t ) , N t =1 N t =1
Lantos: Dinamikus modell identifikációja 19
ARMAX MODELL IDENTIFIKÁCIÓJA
Az A(q) y (t ) = B( q)u (t ) + C (q)e(t ) ARMAX modell ese- A predikciós hiba
tén a paraméterbecslésre a kvázi Newton-módszer szerinti A(q) B (q)
optimum keresés javasolható. Korábbi eredmények szerint ε (t ) = y (t ) − u (t ).
C (q) C (q)
mind a hibakritérium V N′ (ϑ , Z N ) gradiensének, mind pe-
dig a Hess-mátrix H N (ϑ ) közelítésének meghatározásá- A paraméterek szerinti parciális deriváltak a következők:
d ∂ 1 1
hoz ψ (t , ϑ ) = [ yˆ (t , ϑ )] számítását kell kidolgozni. A yˆ (t ) = − q − k y (t ) = − y (t − k ) ,
dϑ ∂ ak C (q) C (q)
jelölések egyszerűsítése érdekében átmenetileg szünetel-
tetni fogjuk a ϑ paraméter kiírását. Az ARMAX modell ∂ 1 1
yˆ (t ) = q −( k −1) u (t ) = u (t − k + 1) ,
következő alakra hozható: ∂ bk C (q) C (q)
∂ A(q ) − k B (q) − k
B(q ) C (q ) yˆ (t ) = 2 q y (t ) − 2 q u (t ) =
y (t ) = u (t ) + e(t ) =: G (q)u (t ) + H (q)e(t ) . ∂ ck C (q ) C (q)
A(q ) A( q)
1 1
Az 1-lépéssel előretartó prediktor: = q −k ε (t ) = ε (t − k ).
C (q) C (q)
A(q) B(q) B(q ) A( q)
H −1 ( q)G (q) = ⋅ = −1
, 1 − H (q) = 1 − , Vezessük be a
C (q) A(q) C (q) C (q)
ϕ (t ) =
B (q) A(q) [− y (t − 1) K − y (t − na ) u (t ) K u (t − nb + 1) ε (t − 1) K ε (t − nc )]T
yˆ (t ) = u (t ) + 1 − y (t ) .
C (q) C (q)
Lantos: Dinamikus modell identifikációja 20
regressziós vektort, akkor a gradiens és a Hess-mátrix kö-
zelítéséhez szükséges ψ (t ) vektort úgy kapjuk meg, hogy Algoritmus a kezdeti becslések meghatározására:
a regressziós vektort az 1 / C (q) szűrőn bocsátjuk át: 1. IV módszerrel meghatározzuk a B / A diszkrétidejű át-
viteli függvény becslését.
1
ψ (t ) := ϕ (t ) .
C (q) 2. Meghatározzuk az egyenlethiba
A számításokat az yˆ (t , ϑ ), ε (t , ϑ ), ϕ (t , ϑ ), ψ (t , ϑ ) sor- νˆ(t ) = Aˆ (q ) y (t ) − Bˆ (q)u (t )
rendben kell elvégezni az aktuális lépésben érvényes pa-
becslését.
raméter értékeknél. Eközben yˆ (t , ϑ ) és ψ (t , ϑ ) számításá-
hoz differenciaegyenletre kell áttérni, amit rekurzívan le- 3. Magas fokszámú kisegítő AR modellt előírva először
het megoldani. meghatározzuk a νˆ (t ) “kimenethez” tartozó zaj eˆ(t )
becslését. A fokszámot az ARMAX modellben szereplő
A lokális optimum elkerülésére szükség van jó kezdeti fokszámok összegére célszerű választani numerikus
becslésre (lásd algoritmus). megfontolásokból. Ezt követően meghatározzuk C
becslését a következő dekompozíció szerint:
Az optimalizálás az így kapott kezdeti paraméterekkel
indítható, alkalmazván a továbbiakban a kvázi-Newton νˆ(t ) = [C (q) − 1]eˆ(t ) + e(t ) .
módszert. Ehhez a parciális deriváltak számítását már ki-
dolgoztuk. Vegyük észre, hogy ez utóbbi lépés egy ARX probléma
A(q) := 1, y := νˆ és B := C (q ) − 1 választás mellett.
Lantos: Dinamikus modell identifikációja 21
PÉLDA AZ ARMAX ÉS IV4 MÓDSZEREK HASZNÁLATÁRA
A mintarendszer, amelynek identifikációjával foglalkozni kációt a zajos jelekkel végeztettük el. A felnyitott körben
fogunk a felvett jelek alapján ARMAX modellt identifikáltunk, a
zárt körben felvett jelekkel pedig IV4 modellt.
1
W ( s) = Az identifikált ARMAX modell diszkrétidejű átviteli
(1 + s )(1 + 4 s )(1 + 7 s )
függvénye
lineáris rendszer, amelyet T = 0.1 sec mintavételi idő mel-
lett a 10 −4 (0.2966 z −1 − 0.4151z −2 + 0.4527 z −3 )
Darmax ( z ) = .
1 − 2.8651z −1 + 2.7344 z − 2 − 0.8692 z −3
10 −4 (0.0575 z −1 + 0.2221z −2 + 0.0536 z −3 )
D( z ) = Az ARMAX modell ekvivalens statikus átviteli tényezője
1 − 2.8660 z −1 + 2.7360 z − 2 − 0.8700 z −3 Aekv = 1.008 (a valódi rendszeré A = 1 ).
diszkrétidejű átviteli függvénnyel jellemezhetünk.
Az identifikációt a tárgyalt módszereket használó A zajmentes kimenetet és az ARMAX modell kimenetét
System Identification Toolboxszal végeztük el. Mivel a az identifikációnál használt bemenet mellett a következő
szimulációs vizsgálatok miatt a valódi rendszer ismert, ábra mutatja.
ezért lehetőség volt ismert nagyságú zajjal terhelni a mért
kimenetet, és megvizsgálni, vajon az identifikált modell a Szintén ábrázoltuk a valódi rendszer és az ARMAX mo-
zajos kimenetre akar-e rásimulni, vagy értelmesebb módon dell átmeneti függvényét, amelyek jó egyezést mutatnak.
a zajmentes kimenetre. A kimenethez ezért σ = 0.05 szó-
rású Gauss-féle zajt adtunk hozzá, és mind a kimenet mé-
résénél, mind pedig a bemenet mérésénél szimuláltuk egy
± 10 V és 12-bites átalakító kvantálási hatását. Az identifi-
Lantos: Dinamikus modell identifikációja 22
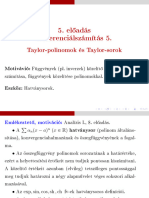
Outputs ys and yarmax
Input u
1 y s , yarmax
1.5
1
0.5
0.5
0
0
-0.5
-0.5
-1
-1
-1.5 0 20 40 60 80 100 120
0 20 40 60 80 100 120
Step responses vs and varmax
Outputs ym and ys 1.5
1.5 v s , varmax
y m , ys
1
1
0.5
0
0.5
-0.5
-1
0
-1.5 0 20 40 60 80 100 120
0 20 40 60 80 100 120 Time (sec)
Time (sec)
A rendszer zajmentes kimenete ( y s szimulált) és az ARMAX mo-
Az ARMAX modell identifikációjához használt bemenőjel ( u ),
zajos kimenet ( y m mért) és zajmentes kimenet ( y s szimulált). dell kimenete ( y armax ) és az átmeneti függvények ( v s , v armax ).
Lantos: Dinamikus modell identifikációja 23
Input u
5
Az IV4 modell identifikációjához használt, a zárt szabá-
lyozási körben a szakasz bemenetén felvett bemenőjelet,
valamint a szakasz kimenetén a zajos és zajmentes kime-
nőjelet a következő ábra mutatja. 0
Az identifikált IV4 modell diszkrétidejű átviteli függvénye
10 −4 (0.0547 z −1 + 0.1037 z −2 + 0.1438 z −3 )
Div4 ( z ) = . -5
1 − 2.8780 z −1 + 2.7598 z −2 − 0.8818 z −3 0 20 40 60 80 100 120
Az IV4 modell ekvivalens statikus átviteli tényezője Outputs ym and ys
Aekv = 0.9872 (a valódi rendszeré A = 1 ). 2
y m , ys
1.5
A zajmentes kimenetet és az IV4 modell kimenetét az 1
identifikációnál használt bemenet mellett az ábra mutatja. 0.5
0
Egy másik ábrán a valódi rendszer és az IV4 modell átme- -0.5
neti függvényét ábrázoltuk, amelyek szintén jó egyezést -1
mutatnak. -1.5
-2
0 20 40 60 80 100 120
Time (sec)
Az IV4 modell identifikációjához használt bemenőjel ( u ), zajos ki-
menet ( y m mért) és zajmentes kimenet ( y s szimulált).
Lantos: Dinamikus modell identifikációja 24
Outputs ys and yiv4
2
y s , yiv4
1.5
0.5
-0.5
-1
-1.5
-2
0 20 40 60 80 100 120
Step responses vs and viv4
1
v s ,viv4
0.8
0.6
0.4
0.2
0
0 20 40 60 80 100 120
Time (sec)
A rendszer zajmentes kimenete ( y s szimulált) és az IV4 modell
kimenete ( y iv4 ), valamint az átmeneti függvények ( v s , v iv4 ).
Lantos: Dinamikus modell identifikációja 25
MIMO RENDSZER ALTÉR-BÁZISÚ IDENTIFIKÁCIÓJA
A diszkrétidejű időinvariáns lineáris rendszert Elméleti alapok:
x k +1 = Ax k + Bu k Az állapotegyenletben szereplő mátrixok megfelelően
y k = Cx k + Du k kondícionált bázisokban becsülhetők. Az egyetlen meg-
adandó paraméter a rendszer rendszáma, amely nem túlsá-
alakúnak feltételezzük, ahol u ∈ R r , y ∈ R m és x ∈ R n , az gosan zajos környezetben az identifikáció során a jelekből
A, B, C , D mátrixok pedig a megfelelő dimenziójúak. felépített mátrix szinguláris értékeiből becsülhető. Ez a je-
Ebben a rendszerleírási módban alternatív módszereket lek szintjén úgy fogható fel, hogy a jelet egy “hasznos”
jelentenek az ún. altér-bázisú identifikációs módszerek (domináns szinguláris értékek) és egy “zaj” (kis szingulá-
(4SID, subspace-based state space system identification ris értékek) komponensre bontjuk fel.
method). Ezen módszerek fő jellemzője olyan egy altér A 4SID algoritmusok eredete Ho és Kalman munkájára
becslése, amelyet a bemeneti-kimeneti adatokból felírt és vezethetők vissza, akik az ún. becsült Markov paraméterek
megfelelő rendszertechnikai elvek alapján megválasztott alapján egy minimális állapotteres modell meghatározásá-
mátrix sor- vagy oszlopvektorai feszítenek ki. A folyamat ra adtak módszert.
paraméteres modelljét azután ezekből a speciális struktúrá- Az impulzusválasz állapotmátrixokkal történő kifejezésé-
jú kifeszített alterekből határozzák meg. ből a D mátrixot a t = 0 -hoz tartozó értékből közvetlenül
Az ilyen elven működő algoritmusok rezonanciával és megkaphatjuk. Az impulzusválasz értékeiből felépülő
antirezonanciával rendelkező, integrátort tartalmazó vagy Hankel-mátrixnak létezik olyan faktorizációja, amelynek
instabil többváltozós lineáris rendszerek esetén is két tényezője a megfigyelhetőségi és az irányíthatósági
numerikusan megbízható állapotteres modellek nyerhetők. mátrix. A minimális realizációból a B és C mátrixok
Előnyük, hogy nem iteratív algoritmusok és nem igényel- közvetlenül megkaphatók, az A mátrix pedig a megfi-
nek numerikus optimum keresést. Így az iteratív algorit- gyelhetőségi mátrix ún. shift-invariancia tulajdonsága
musoknál gyakori lokális optimumban leragadás elkerül- alapján számítható.
hető.
Lantos: Dinamikus modell identifikációja 26
A közönséges MOESP (MIMO output-error state space model realisation) módszer:
i) Markov-paramétereknek nevezzük a hs = CA s −1 B, s = 1,2, K értékeket.
ii) A Γ i kiterjesztett megfigyelhetőségi mátrix ( i > n ) a következő:
C
Γ i = M .
CA
CA i −1
iii) Az impulzus-válaszokból felépülő H i mátrix Toeplitz-struktúrájú, és értelmezése ( i > n ) a következő:
D 0 0 L 0
CB D 0 L 0
H i = CAB CB D L 0.
M M M O M
i −2 i −3 i −4
CA B CA B CA B L D
(1)
iv) Legyen Γ egy ( mi ) × n méretű mátrix ( i > n ), és jelölje a Γ első m(i − 1) sorából álló mátrixot Γ , az utolsó
( 2)
m(i − 1) sorából állót pedig Γ . A Γ mátrixot shift-invariánsnak nevezzük, ha létezik olyan négyzetes (nem szük-
( 2) (1)
ségképpen invertálható) T mátrix, hogy Γ =Γ T . Világos, hogy a Γ i mátrix shift-invariáns, mivel
C CA
2
Γ (1) := M , Γ
CA ( 2)
:= CA
M , T := A ⇒ Γ
( 2)
=Γ (1)
T.
CA i − 2 CA i −1
Lantos: Dinamikus modell identifikációja 27
Az állapotegyenlet alapján írhatjuk, hogy
y j + k = Cx j + k + Du j + k ,
s −1
x j +k +s = A s x j +k + ∑ A s −(l +1) Bu j + k +l ,
l =0
s −1
y j + k + s = CA s x j + k + ∑ CA s −(l +1) Bu j + k +l + Du j + k + s .
l =0
Ha egy oszlopban egymás alá írjuk az y j + k , y j + k +1 , y j + k + 2 , K értékeket, és úgy fogjuk fel, hogy a tranziens az x j + k álla-
potból indult, akkor a MOESP módszer kiindulásaként a bemeneti-kimeneti adatsorok segítségével a következő egyenlet-
rendszer írható fel:
yj y j +1 y j+2 L y j + N −1
C
y y j+2 y j +3 L y j + N CA
j +1
y j+2 y j +3 y j+4
2
L y j + N +1 = CA x j [ x j +1 x j + 2 L x j + N −1 + ]
M M M M M Mi −1
y j + i −1 y j +i y j + i +1 L y j + N + i − 2 CA
L 0 j
u u j +1 u j+2 L u j + N −1
D 0 0
CB D 0 L 0 u j +1 u j + 2 u j +3 L u j+N
+ CAB CB D L 0 ⋅ u j + 2 u j +3 u j+4 L u j + N +1
M M M O 0
i−2 i −3 i−4 M M M M M
CA B CA B CA B L D u u u j + i +1 L u j + N + i − 2
j + i −1 j +i
Lantos: Dinamikus modell identifikációja 28
Célszerű ezért bevezetni az állapotokból, bemenőjel értékekből és kimenőjel értékekből álló következő mátrixokat:
X j , N := [ x j x j +1 x j + 2 L x j + N −1 ] ,
yj y j +1 y j+2 L y j + N −1
y y j +2 y j +3 L y j+N
j +1
Y j, i, N := y j + 2 y j +3 y j+4 L y j + N +1 ,
M M M M M
y j +i −1 y j +i y j +i +1 L y j + N +i − 2
uj u j +1 u j +2 L u j + N −1
u u j+2 u j +3 L u j+N
j +1
U j, i, N := u j + 2 u j +3 u j +4 L u j + N +1 .
M M M M M
u j +i −1 u j +i u j +i +1 L u j + N +i − 2
Az így bevezetett jelölésekkel a rendszer (általában nem mérhető) állapotai, a rendszerről méréssel felvehető bemeneti-
kimeneti adatsorok, valamint az identifikálandó rendszert tömören jellemző Γ i és H i mátrixok között a következő
kapcsolat írható fel: Y j , i , N = Γ i X j , N + H iU j , i, N . A továbbiakban j = 1 értéket választva a MOESP módszer vizsgálatára
az Y1, i, N = Γ i X 1, N + H iU 1, i, N
egyenletrendszer fog szolgálni. Feltesszük még, hogy a bemenőjel perzisztens abban az értelemben, hogy rank (U 1, i , N ) = ri ,
ahol r = dim u
.
Lantos: Dinamikus modell identifikációja 29
A vizsgálatok során fel fogjuk használni a lineáris algebra következő eredményeit:
i) Tetszőleges (valós elemű) X mátrixnak van X = QR ún. QR-faktorizációja, ahol Q ortonormált mátrix és R felső
blokk-háromszögmátrix, tehát
QQ T = Q T Q = I , R = 11
R R12
, X = QR ,
0 R22
ahol X és R mérete megegyezik. A QR-faktorizáció MATLAB környezetben a qr függvénnyel határozható meg.
~~ ~ ~
ii) Ha a QR-faktorizációt az X T mátrixra alkalmazzuk, akkor X T = QR , ahonnan transzponálással X = R T Q T =: RQ kö-
vetkezik, tehát tetszőleges X mátrixnak van X = RQ ún. RQ-faktorizációja is, ahol Q ortonormált és R alsó blokk-
háromszögmátrix.
iii) Tetszőleges X mátrixnak van X = UΣV T szinguláris érték felbontása (SVD), ahol U és V ortonormált mátrixok, to-
vábbá a Σ diagonális mátrix tartalmazza az X mátrix (mindig nemnegatív) szinguláris értékeit csökkenő sorrendben,
lásd (12.57a-d). A szinguláris érték felbontás MATLAB környezetben az svd függvénnyel határozható meg.
iv) Tetszőleges AX = B egyenlet X megoldásának választható X = A + B , ahol A + az A mátrix Moore-Penrose
pszeudoinverze. A Moore-Penrose pszeudoinverz MATLAB környezetben a pinv függvénnyel határozható meg.
Lantos: Dinamikus modell identifikációja 30
Vizsgáljuk meg még a koordináta-transzformáció hatását. Ha a (nemszinguláris) T mátrix írja le a koordináta-
transzformációt, akkor az állapotegyenlet mátrixai és a Markov-paraméterek a transzformáció után a következők lesznek:
AT = TAT −1 , BT = TB, CT = CT −1 , DT = D ,
~
hs = CT ( AT ) s BT = CT −1 (TAT −1 ) s TB = CA s B = hs .
Tételezzük fel, hogy egy U n mátrix oszlopai kifeszítik Γ i képterét, vagy más néven az oszlopterét. Tudjuk, hogy i > n ,
ezért minimális (teljesen megfigyelhető és teljesen irányítható) rendszer reprezentáció esetén rank (Γ i ) = rank (U n ) = n ,
ezért létezik olyan T1 nemszinguláris mátrix, hogy
U n = Γ i T1 .
Jelölje a U n első m(i − 1) sorából álló mátrixot U n(1) , az utolsó m(i − 1) sorából állót pedig U n( 2) . Tekintsük a T := T1−1
koordináta-transzformációt. Akkor a konstrukció szerint
U n(1) = Γ i (1) T1 = Γ i (1) T −1 , U n( 2) = Γ i ( 2) T1 = Γ i ( 2) T −1 = Γ i (1) AT −1 = ( Γ i (1) T −1 )(TAT −1 ) = U n(1) AT ,
U n( 2) = U n(1) AT ,
ezért U n is shift-invariáns mátrix.
Lantos: Dinamikus modell identifikációja 31
MOESP algoritmus:
1. Jelölje n̂ az ismeretlen rendszer rendszámának egy felső becslését. Válasszuk meg i > nˆ értékét, pl. i := (2 K10) nˆ -re.
Ennek során figyelemmel kell lenni arra, hogy az RQ-algoritmus számításideje kb. i 2 arányában nő. Válasszuk meg a
mérési adatok N számát az N >> r ⋅ i feltétel betartásával. Végezzünk adatgyűjtést az ismeretlen rendszer bemenetén és
kimenetén, és a mérési adatokból építsük fel az U 1, i , N és Y1, i, N Hankel-mátrixokat.
2. Határozzuk meg az adatokból felépített összetett mátrix RQ-faktorizációját:
U 1, i , N R11 0 Q1
Y = .
1, i , N R21 R22 Q2
Itt R11 mérete (r ⋅ i ) × (r ⋅ i ) , R22 mérete pedig (m ⋅ i ) × (m ⋅ i ) , ahol r = dim u és m = dim y . Az elmélet szerint
rank ( R22 ) = n , ahol n = dim x .
3. Határozzuk meg R22 szinguláris érték (SVD) felbontását, és legyen a dominánsnak választott szinguláris értékek száma
n , amelyet a minimális rendszer rendszámának fogunk tekinteni. A szinguláris érték felbontás ekkor a következő lesz:
0 VnT
[
R22 = U n ]
Σ
U n⊥ n
0 Σ 0 (Vn⊥ ) T
,
ahol U n mérete ( m ⋅ i ) × n , U n⊥ mérete ( m ⋅ i ) × ( m ⋅ i − n) , Σ n mérete n × n , Σ 0 mérete ( m ⋅ i − n) × (m ⋅ i − n) , Vn pedig
Σ -nak megfelelően partícionált.
4. Az (alább részletezendő összefüggések alapján) AT , BT , CT , DT meghatározása.
Lantos: Dinamikus modell identifikációja 32
A továbbiakban a MATLAB-ban használt indexelések mellett adjuk meg a nagyobb mátrixokból kivágott blokk-mátrixokat.
Tekintsük először R22 -nek az SVD-felbontását a dominánsnak választott szinguláris értékek n számának megfelelő
partícionálás mellett. Jelölje az U n első m(i − 1) sorából álló mátrixot U n(1) , az utolsó m(i − 1) sorából állót pedig U n( 2) .
Akkor
CT = U n (1 : m, :) ,
U n(1) AT = U n( 2) ⇒ AT := (U n(1) ) + U n( 2) ,
ahol a Moore-Penrose pszeudoinverzet használtuk.
Tekintsük ezután az adatok között fennálló egyenletet, és helyettesítsük be az egyenletbe az Y1, i , N = R21Q1 + R22 Q2 ,
U 1, i, N = R11Q1 , R22 = U n Σ nVnT és Γ i = U n T1−1 = U n T összefüggéseket, akkor a következő kifejezést kapjuk:
U n TX 1, N + H i R11Q1 = R21Q1 + U n Σ nVnT Q2 .
Mivel U = [U n U n⊥ ] ortonormált, ezért (U n⊥ )T U n = 0 , ha tehát az egyenlet mindkét oldalát megszorozzuk az (U n⊥ ) T mát-
rixszal, akkor azt kapjuk, hogy
((U ⊥ T
n ) )
H i R11 − (U n⊥ ) T R21 Q1 = 0 .
Ha az egyenletet megszorozzuk jobbról Q1T -tal és figyelembe vesszük, hogy Q ortonormalitása miatt Q1Q1T = I , akkor
következik
(U n⊥ ) T H i R11 − (U n⊥ ) T R21 = 0 .
Lantos: Dinamikus modell identifikációja 33
−1
Ha a gerjesztés perzisztens, tehát rank (U 1, i , N ) = r ⋅ i , akkor U 1, i, N = R11Q1 , és mivel Q1 maximális rangú, ezért ∃ R11 és
−1
(U n⊥ ) T H i = (U n⊥ ) T R21 R11 .
Vezessük be a
Ψ (:,1 : r )
Ψ (:, + 1 : 2 )
Ψ := (U n⊥ ) T −1
R21 R11 = (U n⊥ ) T +
R21 R11 , Ψˆ := r r
,
M
Ψ (:, r (i − 1) + 1 : ri )
U n⊥ (1 : m, :) T U n⊥ (m + 1 : 2m, :) T L U n⊥ (m(i − 1) + 1 : mi, :) T
⊥ I m 0
Φ := U n (m + 1 : 2m, :)
T
U n⊥ (2m + 1 : 3m, :) T L 0 , Φˆ := Φ (1)
M M N M 0 Un
U n⊥ ( m(i − 1) + 1 : mi, :) T 0 L 0
jelöléseket, összhangban a H i mátrix alakjával és a következő felírási móddal:
CB C
CAB = CA T −1 (TB ) = Γ (1) T −1 (TB ) = U (1) B .
M M i n T
i−2 i−2
CA B CA
Akkor a DT és BT mátrixokra egy egyenletrendszert kapunk, amit pl. a robusztus Moore-Penrose pszeudoinverzzel (LS ér-
telemben) megoldhatunk:
Φˆ T =Ψˆ ⇒ T = Φˆ + Ψˆ
D D
BT BT
Lantos: Dinamikus modell identifikációja 34
PÉLDA A MOESP MÓDSZER HASZNÁLATÁRA
A mintarendszer egy kétszabadságfokú robotkar, amely
egy erősen nemlineáris dinamikus rendszer. Mivel a
MOESP módszer csak lineáris rendszerekre érvényes y2 x2
identifikációs módszer, ezért a robotkart kis változásokra l2
különféle munkapontokban linearizáltuk. A mintarendszer K2
előnyös abból a szempontból, hogy a munkapontokat vál- lc 2
toztatva stabilis, csillapítatlan oszcilláló, integráló és labi- m2 , I 2
ϕ2
lis linearizált rendszerek is előállnak. y1
lc1 x1
l1
A robotkar paraméterei a következők: m1 , m 2 = 5 kg , y0 K1
2
I 1 , I 2 = 1 kg m , l1 = l 2 = 1 m és l c1 , l c 2 = 0.5 m .
ϕ1 m1 , I1
K0
x0
Tekintsük a nemlineáris rendszert a q 0 = (−π / 2, 0) T
munkapont környezetében (a szögek radiánban, a nyoma-
tékok Nm-ben értendők). A folytonosidejű linearizált A robotkar blokkvázlata
rendszer eme munkapont körül két-két csillapítatlan kon-
jugált komplex póluspárral rendelkezik.
Lantos: Dinamikus modell identifikációja 35
A linearizált rendszer állapotegyenlete a q 0 = (−π / 2, 0) T munkapont környezetében folytonos időben
0 0 1 0 0 0
0
x& = − 10.3584 0 0 1 x + 0 0 u,
6.0932 0 0 0.2236 − 0.4720
10.9677 − 23.7634 0 0 − 0.4720 1.4410
y = 10 10 00 00 x,
diszkrét időben T = 0.025 sec mintavételi idő mellett pedig
0.9968 0.0019 0.0250 0.0000 0.0001 − 0.0001
xk +1 = − 0.2585 00..9926
0 .0034
1518
0.0000
0.9968
0.0249 x + − 0.0001 0.0004 u ,
0.0019 k 0.0056 − 0.0118 k
0.2732 − 0.5924 0.0034 0.9926 − 0.0118 0.0359
y k = 10 10 00 00 xk .
Az identifikációhoz a nemlineáris rendszert elláttuk szabályozóval, és olyan referencia jelet választottunk, amely a q 0 mun-
kapont körüli kis (kb. ± 5o ) változásokra késztette a rendszert.
Az identifikációhoz a jeleket a nemlineáris rendszeren vettük fel zárt szabályozási körben. A jelekből a munkaponti értéke-
ket levontuk, és az így kapott jelek láthatók már az ábrán.
Lantos: Dinamikus modell identifikációja 36
Inputs u1 and u2 [Nm] u = > y1, y1MOESP [rad]
200 0.2
u1 , u 2 y 1 , y1MOESP
0.15
150
0.1
100
0.05
50
0
0 -0.05
-50 -0.1
-100 -0.15
-150 -0.2
0 5 10 15 20 25 0 5 10 15 20 25
Outputs y1 and y2 [rad] u = > y2, y2MOESP [rad]
0.15 0.2
y1 , y2 y 2 , y2MOESP
0.15
0.1
0.1
0.05
0.05
0
0
-0.05 -0.05
-0.1 -0.1
-0.15 -0.15
-0.2 -0.2
0 5 10 15 20 25 0 5 10 15 20 25
Time (sec) Time (sec)
Az identifikációnál használt bemenő- és kimenőjelek A lineariált rendszer és a MOESP-pel identifikált rendszer válaszje-
(munkapont körüli változások) lei
Lantos: Dinamikus modell identifikációja 37
A jelek alapján elvégeztük a linearizált modell meghatáro- A linearizált rendszer és az identifikált modell pólusai a
zását a MOESP módszerrel, i = 50 értéket választva a q0 = ( −π / 2, 0)T stabilis munkapont környezetében:
Hankel-mátrixok számára. A domináns szinguláris értékek
n = 4 -re adódtak, a fizikai képnek megfelelően. Mivel a Linearizát rendszer pólusai MOESP-pel kapott pólusok
MOESP módszerbe eleve beépül egy koordináta- 0.9980+j0.0636 0.9980+j0.0636
transzformáció, ezért az állapotváltozók az identifikált 0.9980-j0.0636 0.9980-j0.0636
0.9914+j0.1310 0.9914+j0.1305
rendszernél mások lesznek. 0.9914-j0.1310 0.9914-j0.1305
Csak az invariáns rendszerjellemzőket van értelme ezért
összehasonlítani. Ilyenek például az állapotegyenlet saját- Egy érdekes kérdés,hogy mennyire általánosítható ez a
értékei (az átviteli függvény mátrix pólusai) és az átviteli tapasztalat integráló vagy instabil rendszerekre. Példaként
függvények, vagy például az amplitudómenet. Az identifi- tekintsük a robotkar felső helyzetét, aminek labilis
káció jóságát ezért vizsgálhatjuk az időtartományban, fel- munkapont felel meg.
rajzolván a mért kimeneteket és az identifikált modell ki-
meneteit a mért bemenőjelek mellett, illetve a frekvencia- A linearizált rendszer és az identifikált modell pólusai a
tartományban az invariáns rendszerjellemzők ellenőrzésé- q0 = (π / 2, 0)T labilis munkapont környezetében:
vel.
Linearizát rendszer pólusai MOESP-pel kapott pólusok
1.1404 1.1399
Az ábra alapján megállapíthatjuk, hogy a mért és az identi- 1.0658 1.0657
fikált modellel kapott kimenőjelek gyakorlatilag egybees- 0.9383 0.9384
nek, tehát az identifikáció hatékony volt. 0.8769 0.8767
A MOESP módszer ebben a labilis munkapontban is elfo-
gadható eredményt ad a pólusokra.
Lantos: Dinamikus modell identifikációja 38
You might also like
- Záróvizsga TémakörökDocument61 pagesZáróvizsga TémakörökAdry100% (3)
- ElőadásDocument53 pagesElőadásgelesztamasNo ratings yet
- Irányításelmélet Előadás 9Document20 pagesIrányításelmélet Előadás 9gelesztamasNo ratings yet
- Irányításelmélet Előadás 4Document16 pagesIrányításelmélet Előadás 4gelesztamasNo ratings yet
- Irányításelmélet Előadás 0Document14 pagesIrányításelmélet Előadás 0gelesztamasNo ratings yet
- Diffegyenletek 5Document8 pagesDiffegyenletek 5Bódi AndrásNo ratings yet
- Irányításelmélet Előadás 8Document19 pagesIrányításelmélet Előadás 8gelesztamasNo ratings yet
- 03 An Alk 2022 OszDocument28 pages03 An Alk 2022 OszhahaNo ratings yet
- Relm1 BSC Lecture 03Document51 pagesRelm1 BSC Lecture 03fischikomaartNo ratings yet
- Példa: Egyenáramú Motor Szabályozása. Modellalkotás:: PletlDocument7 pagesPélda: Egyenáramú Motor Szabályozása. Modellalkotás:: PletlSzabó BalázsNo ratings yet
- KInematika, KinetikaDocument24 pagesKInematika, Kinetikalr.zoliNo ratings yet
- 07 HatvanymodszerDocument7 pages07 HatvanymodszeresportsbreadNo ratings yet
- 05 Ea An II 2023 OszDocument27 pages05 Ea An II 2023 OszYuchen JiNo ratings yet
- Manager Fizika7 8 ADocument67 pagesManager Fizika7 8 ASándor BabjákNo ratings yet
- Fizika KepletgyujtemenyDocument4 pagesFizika KepletgyujtemenyBiking FemboyNo ratings yet
- BodeDocument6 pagesBodemikola93No ratings yet
- Dinamikus Opt - LeontiefDocument9 pagesDinamikus Opt - LeontiefSzabolcs FenyvesNo ratings yet
- Diffegyenletek 4Document7 pagesDiffegyenletek 4Bódi AndrásNo ratings yet
- BMEEOTMAMM1-dinamika APkinematikaDocument31 pagesBMEEOTMAMM1-dinamika APkinematikaFanni KisfaludyNo ratings yet
- Manager Fizika20Document28 pagesManager Fizika20Sándor BabjákNo ratings yet
- DinamikaDocument3 pagesDinamikaGergely TamásNo ratings yet
- FEJEZET. A Hullámfüggvény És A Schrödinger Egyenlet A Hullámfüggvény Fizikai Értelmezése, NormálásaDocument19 pagesFEJEZET. A Hullámfüggvény És A Schrödinger Egyenlet A Hullámfüggvény Fizikai Értelmezése, NormálásaHajnalka PikaliNo ratings yet
- An 2 PolarDocument93 pagesAn 2 PolarTibor KeményNo ratings yet
- Irányításelmélet Előadás 1Document11 pagesIrányításelmélet Előadás 1gelesztamasNo ratings yet
- Műszaki Hőtan IIDocument14 pagesMűszaki Hőtan IIclarkjozsue0% (1)
- Nagy Attila - Matematika A2a Jegyzet (Többváltozós Függvények)Document57 pagesNagy Attila - Matematika A2a Jegyzet (Többváltozós Függvények)Nándor MarkótNo ratings yet
- Elektronika I.Document64 pagesElektronika I.Muntyán Gábor100% (4)
- Lab - 12. (SzIR+ FMR)Document5 pagesLab - 12. (SzIR+ FMR)kelemen.csongor63No ratings yet
- FR 3Document2 pagesFR 3Dávid KrebszNo ratings yet
- Taylor SorDocument4 pagesTaylor Sorpatrik 88No ratings yet
- Dr. Kovács Ernő Elektronika I.Document124 pagesDr. Kovács Ernő Elektronika I.Csaba György KissNo ratings yet
- Matematikai Analízis III.Document23 pagesMatematikai Analízis III.István JuhászNo ratings yet
- Cukor 230130Document9 pagesCukor 230130Ági CsengeriNo ratings yet
- Eload 6Document8 pagesEload 6tszantai46No ratings yet
- Lin RendszerekDocument40 pagesLin Rendszerekgiweto9170No ratings yet
- Irányításelmélet Előadás 12Document23 pagesIrányításelmélet Előadás 12gelesztamasNo ratings yet
- Az Időállandó TartományDocument18 pagesAz Időállandó TartományBertalan KissNo ratings yet
- H Azi Feladat: October 4, 2023Document2 pagesH Azi Feladat: October 4, 2023ᴋᴇɴɴʏ ⁎No ratings yet
- ElőadásDocument27 pagesElőadásTamás KoósaNo ratings yet
- 6 Fazisatalakulasok 14Document13 pages6 Fazisatalakulasok 14Gergely BoguszlavszkijNo ratings yet
- Zh2a MoDocument3 pagesZh2a MoPatrik PistaNo ratings yet
- Kepler Torvenyek BizonyitasaDocument9 pagesKepler Torvenyek BizonyitasaLászló VerhóczkiNo ratings yet
- Jelek Es Rendszerek Peldatar V0 - Dr. Kuczmann Miklos PDFDocument78 pagesJelek Es Rendszerek Peldatar V0 - Dr. Kuczmann Miklos PDFTihanyi PéterNo ratings yet
- Közönséges DifferenciálegyenletekDocument7 pagesKözönséges DifferenciálegyenletekPKata01No ratings yet
- zh2b MoDocument3 pageszh2b MoPatrik PistaNo ratings yet
- vd1 Teszt SolDocument4 pagesvd1 Teszt SolPatrik PistaNo ratings yet
- 17 Diff Egy Kezdeti Ertek 2021Document18 pages17 Diff Egy Kezdeti Ertek 2021Féderer IstvánNo ratings yet
- LagHam2 1 PDFDocument19 pagesLagHam2 1 PDFPeterNo ratings yet
- Valszamb Seged AnyagDocument4 pagesValszamb Seged AnyagMark VeerNo ratings yet
- 01 Ea An II 2023 OszDocument53 pages01 Ea An II 2023 OszYuchen JiNo ratings yet
- VáltóáramDocument8 pagesVáltóárammárton tornaiNo ratings yet
- Sorok ElőadásDocument15 pagesSorok ElőadásButterfly PurpleNo ratings yet
- Gyak 10Document2 pagesGyak 10Asdok AsderNo ratings yet
- Kettős IntegrálokDocument2 pagesKettős IntegrálokKálmán RétesNo ratings yet
- Irányításelmélet Előadás 13Document4 pagesIrányításelmélet Előadás 13gelesztamasNo ratings yet
- Fommulario pc2Document2 pagesFommulario pc2Cristopher Anthony Turpo GonzalesNo ratings yet
- Szir FMR Lab 06-07 (Par Becslo)Document9 pagesSzir FMR Lab 06-07 (Par Becslo)kelemen.csongor63No ratings yet
- Numerikus Módszerek PéldatárDocument286 pagesNumerikus Módszerek Példatárgelesztamas100% (1)
- Irányításelmélet Előadás 13Document4 pagesIrányításelmélet Előadás 13gelesztamasNo ratings yet
- Irányításelmélet Előadás 6Document23 pagesIrányításelmélet Előadás 6gelesztamasNo ratings yet
- Irányításelmélet Előadás 3Document14 pagesIrányításelmélet Előadás 3gelesztamasNo ratings yet
- Irányításelmélet Előadás 5Document11 pagesIrányításelmélet Előadás 5gelesztamasNo ratings yet
- Irányításelmélet Előadás 2Document17 pagesIrányításelmélet Előadás 2gelesztamasNo ratings yet
- Irányításelmélet Előadás 1Document11 pagesIrányításelmélet Előadás 1gelesztamasNo ratings yet
- ElőadásDocument41 pagesElőadásgelesztamasNo ratings yet
- ElőadásDocument47 pagesElőadásgelesztamas100% (1)
- BME GPK Gepeszmernoki BSC Kepzesi Program 2017 R1 FULLDocument39 pagesBME GPK Gepeszmernoki BSC Kepzesi Program 2017 R1 FULLgelesztamasNo ratings yet
- Rezgestan Kepletgy ZH 2019Document1 pageRezgestan Kepletgy ZH 2019gelesztamasNo ratings yet