You might also like
- RoboticsDocument12 pagesRoboticsAngel Mae D. AndolanNo ratings yet
- Assembly DrawingsDocument15 pagesAssembly DrawingsN Dhanunjaya Rao BorraNo ratings yet
- Assembly DrawingsDocument15 pagesAssembly DrawingsN Dhanunjaya Rao BorraNo ratings yet
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Catia V5 CATIA Generative Sheetmetal Design: Student GuideDocument3 pagesCatia V5 CATIA Generative Sheetmetal Design: Student GuideN Dhanunjaya Rao BorraNo ratings yet
- Robotics and Automations Material - M - Vinoth KumarDocument63 pagesRobotics and Automations Material - M - Vinoth Kumartumati venkata vinayNo ratings yet
- Automate This - The Business Leader's Guide To Robotic and Intelligent Automation by DeloitteDocument24 pagesAutomate This - The Business Leader's Guide To Robotic and Intelligent Automation by Deloittegong688665No ratings yet
- Yaskawa Academy 2016 EDocument56 pagesYaskawa Academy 2016 Ejmorenoh103100% (1)
- Advanced NDE Lesson 1Document190 pagesAdvanced NDE Lesson 1N Dhanunjaya Rao BorraNo ratings yet
- A Robotic Automatic Assembly System Based On VisioDocument19 pagesA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Internet of Things: The Pillar of Artificial IntelligenceDocument64 pagesInternet of Things: The Pillar of Artificial IntelligencePaulo PereiraNo ratings yet
- Welding RobotsDocument22 pagesWelding RobotsBHUKYA GandhiNo ratings yet
- Pick and Place Robot Report New Edited2Document19 pagesPick and Place Robot Report New Edited2Kshitij BandarNo ratings yet
- 4A - Capstone 2 Floor Disinfecting Robot-1Document20 pages4A - Capstone 2 Floor Disinfecting Robot-1Kristian ApuraNo ratings yet
- Robotics PDFDocument60 pagesRobotics PDFSiri AggarapuNo ratings yet
- Robotics Book Unit 1 & 2Document33 pagesRobotics Book Unit 1 & 2arun193905No ratings yet
- R&A Module 1ADocument78 pagesR&A Module 1ANagaraj BhatNo ratings yet
- BRE 501 Industrial RoboticsDocument26 pagesBRE 501 Industrial RoboticsakshaysinghNo ratings yet
- Introduction To Industrial RoboticsDocument5 pagesIntroduction To Industrial RoboticsJava TechNo ratings yet
- MME 1366: Robotics Credits: 3 LTP 300Document2 pagesMME 1366: Robotics Credits: 3 LTP 300virender gurauNo ratings yet
- Robot Soccer A Platform For Systems EngineeringDocument10 pagesRobot Soccer A Platform For Systems EngineeringglumarkNo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- CDM ME 464 Robotics and Automation-2022Document17 pagesCDM ME 464 Robotics and Automation-2022Tony K PaulNo ratings yet
- 17me563 Syll PDFDocument2 pages17me563 Syll PDFDivya SuvarnaNo ratings yet
- P&P Report PDFDocument10 pagesP&P Report PDFJûstîn TiwariNo ratings yet
- Synosis Print ReportDocument6 pagesSynosis Print ReportNIKHIL ASNo ratings yet
- Robotics: Development of A Practical Tool For Designing Multi-Robot Systems in Pick-and-Place ApplicationsDocument16 pagesRobotics: Development of A Practical Tool For Designing Multi-Robot Systems in Pick-and-Place ApplicationsvisionNo ratings yet
- Rae Rob2 Industrial Robotic Design PrinciplesDocument15 pagesRae Rob2 Industrial Robotic Design Principlesayahalomari0roNo ratings yet
- Report CssDocument16 pagesReport CssPranav ShirsatNo ratings yet
- Bece312l Robotics-And-Automation TH 1.0 75 Bece312lDocument2 pagesBece312l Robotics-And-Automation TH 1.0 75 Bece312lViswanadh VankamamidiNo ratings yet
- Module 1Document6 pagesModule 1N BHUSHANNo ratings yet
- Unit 5Document21 pagesUnit 5Sarika MadugulaNo ratings yet
- Non-Traditional Machining and Automation: B.Tech. (4 Sem) Spring 2021 Department of Mechanical Engineering NIT SrinagarDocument18 pagesNon-Traditional Machining and Automation: B.Tech. (4 Sem) Spring 2021 Department of Mechanical Engineering NIT SrinagarJatin prasad TandanNo ratings yet
- RoboticsDocument32 pagesRoboticsNimmagaddadeepakNo ratings yet
- Integrated Image Processing and Path Planning For Robotic SketchingDocument6 pagesIntegrated Image Processing and Path Planning For Robotic SketchingĐào Văn HưngNo ratings yet
- RoboticsDocument2 pagesRoboticsvasanthsatNo ratings yet
- ScaraDocument9 pagesScaraSalvatore VillaniNo ratings yet
- Unit 1Document100 pagesUnit 1apakkiNo ratings yet
- Industrial RobotDocument14 pagesIndustrial RobotAbdo HeshamNo ratings yet
- Q2. What Is Robot? What Are The Laws of Robot?Document5 pagesQ2. What Is Robot? What Are The Laws of Robot?Ashikur RahmanNo ratings yet
- MainDocument11 pagesMainManuel ortiz camachoNo ratings yet
- Robotics Unit-1Document104 pagesRobotics Unit-1S19IT1215 HarshithaNo ratings yet
- Answer Key It-2 CseDocument9 pagesAnswer Key It-2 CseVenkadeshNo ratings yet
- Robotics (ME 21396) : 1st Semester M Tech (CC)Document37 pagesRobotics (ME 21396) : 1st Semester M Tech (CC)Mahima SinghNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- MD Husamuddin (20 6609)Document23 pagesMD Husamuddin (20 6609)nphotographer99No ratings yet
- Mohammed 2013Document17 pagesMohammed 2013FiandjafarNo ratings yet
- COE101-MODULE 1 IntroductionDocument6 pagesCOE101-MODULE 1 IntroductionOliver MedinaNo ratings yet
- Robotics MainDocument2 pagesRobotics MainrijuNo ratings yet
- Robotic Arm LabDocument5 pagesRobotic Arm LabBryan Owen Salcedo SantosNo ratings yet
- B.E Mech Batchno 107Document57 pagesB.E Mech Batchno 107saravana murthyNo ratings yet
- An Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerDocument14 pagesAn Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerMihail AvramovNo ratings yet
- Colombo Et Al ISR-Robotik06Document12 pagesColombo Et Al ISR-Robotik06Ravikumar NagulaNo ratings yet
- 18BME025 - ME404 AssgnDocument13 pages18BME025 - ME404 AssgndevashNo ratings yet
- Exploring The World of Line-Following RobotsDocument5 pagesExploring The World of Line-Following RobotsjackNo ratings yet
- Cad Cam Cim Pages 488 520Document33 pagesCad Cam Cim Pages 488 520Luis David SanchezNo ratings yet
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocument11 pagesUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNo ratings yet
- Final Year B.tech-Robotics Lab ManualDocument37 pagesFinal Year B.tech-Robotics Lab ManualHIRSHITHA RAJEENo ratings yet
- Module 6 - Industrial ApplicationsDocument34 pagesModule 6 - Industrial ApplicationsSai Devaraju V SNo ratings yet
- Open Ended Assignment (A&R)Document13 pagesOpen Ended Assignment (A&R)Farrukh FarrukhNo ratings yet
- ME809 9 Robotics LT PC: Anna University, Chennai Affiliated Institutions B.E. Mechanical Engineering Regulations - 2017Document2 pagesME809 9 Robotics LT PC: Anna University, Chennai Affiliated Institutions B.E. Mechanical Engineering Regulations - 2017Mech HoD DAITNo ratings yet
- Obstacle Avoiding RobotDocument24 pagesObstacle Avoiding Robotmkafle101No ratings yet
- Authors' ProfilesDocument378 pagesAuthors' ProfilesHabib MasumNo ratings yet
- Ece2008 Robotics-And-Automation Eth 2.0 40 Ece2008Document2 pagesEce2008 Robotics-And-Automation Eth 2.0 40 Ece2008Raj GaneshNo ratings yet
- SM 6th Sem Mech Industrial Robotics AutomationDocument39 pagesSM 6th Sem Mech Industrial Robotics AutomationSulaiman AL MajdubNo ratings yet
- 4.6 RoboticsDocument15 pages4.6 Roboticsadamtbaba07No ratings yet
- DV04PUB11 Study GuideDocument5 pagesDV04PUB11 Study GuidetharNo ratings yet
- MCMT Mid-1 P-QusDocument5 pagesMCMT Mid-1 P-QusN Dhanunjaya Rao BorraNo ratings yet
- Unit-1: Fundamentals of MachiningDocument2 pagesUnit-1: Fundamentals of MachiningN Dhanunjaya Rao BorraNo ratings yet
- Composite Materials QuotationDocument1 pageComposite Materials QuotationN Dhanunjaya Rao BorraNo ratings yet
- CAMD QuestionsDocument3 pagesCAMD QuestionsN Dhanunjaya Rao Borra100% (1)
- Part A5 Cotter JointsDocument8 pagesPart A5 Cotter JointsN Dhanunjaya Rao BorraNo ratings yet
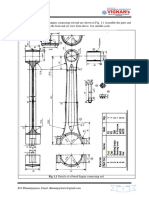
- Part-B1-Petrol Engine Connecting RodDocument5 pagesPart-B1-Petrol Engine Connecting RodN Dhanunjaya Rao BorraNo ratings yet
- Part A5 Cotter JointsDocument8 pagesPart A5 Cotter JointsN Dhanunjaya Rao BorraNo ratings yet
- Part A4 Keyed JointsDocument8 pagesPart A4 Keyed JointsN Dhanunjaya Rao BorraNo ratings yet
- Lesson11 ANSI PDFDocument93 pagesLesson11 ANSI PDFN Dhanunjaya Rao BorraNo ratings yet
- Part A5 Cotter JointsDocument6 pagesPart A5 Cotter JointsN Dhanunjaya Rao BorraNo ratings yet
- Pi 2007 - QP PDFDocument16 pagesPi 2007 - QP PDFN Dhanunjaya Rao BorraNo ratings yet
- Service Cum No Objection CertificateDocument1 pageService Cum No Objection CertificateN Dhanunjaya Rao BorraNo ratings yet
- Capstone Project by (3631)Document15 pagesCapstone Project by (3631)Arvind YadavNo ratings yet
- The Impact of Robotics in The Industrial and Economic GrowthDocument25 pagesThe Impact of Robotics in The Industrial and Economic GrowthJaneth Miguel SatrainNo ratings yet
- Robots 447Document36 pagesRobots 447manishtopsecretsNo ratings yet
- Building A Fully Autonomous Tour Guide Robot: Where Academic Research Meets IndustryDocument6 pagesBuilding A Fully Autonomous Tour Guide Robot: Where Academic Research Meets Industryriteish singhNo ratings yet
- TC Adventure Addendum (Final Download)Document43 pagesTC Adventure Addendum (Final Download)Philip DoringNo ratings yet
- Design Proj Ideas 08Document4 pagesDesign Proj Ideas 08Bivin MathewNo ratings yet
- Zenbo Robot Tear Down: AnalysisDocument2 pagesZenbo Robot Tear Down: AnalysisMuneeb Irfan100% (1)
- Game TheoryDocument3 pagesGame TheoryPranav MenonNo ratings yet
- Multi Purpose Agriculture Robot: A.H.Pavithra S.Shalini S.VigneshwariDocument11 pagesMulti Purpose Agriculture Robot: A.H.Pavithra S.Shalini S.Vigneshwarisweetie pieNo ratings yet
- 02 Activity 1 Reading WritingDocument5 pages02 Activity 1 Reading WritingFranchezka Ainsley AfableNo ratings yet
- Use of Robots/machine in Industrial FacilitiesDocument1 pageUse of Robots/machine in Industrial FacilitiesJona Morales AcostaNo ratings yet
- Description Yaskawa GP7 GP8Document2 pagesDescription Yaskawa GP7 GP8SidcleyNo ratings yet
- Military Spying and Bomb Disposal Robot With Night VisionDocument5 pagesMilitary Spying and Bomb Disposal Robot With Night VisionAniket PawadeNo ratings yet
- Upload Obstacle AvoidingDocument40 pagesUpload Obstacle AvoidinglesaNo ratings yet
- FIPA Gesamtkatalog Greifertechnik en USDocument298 pagesFIPA Gesamtkatalog Greifertechnik en USMarco ViniciusNo ratings yet
- Test 33Document11 pagesTest 33Đặng Hồng PhúcNo ratings yet
- Ziff, Paul - 'The Feeling of Robots'Document6 pagesZiff, Paul - 'The Feeling of Robots'DylanOSullivanNo ratings yet
- Writing Final DrewnowskiDocument4 pagesWriting Final Drewnowskiapi-405537043No ratings yet
- Robots and Service Innovation in Health Care: EssayDocument5 pagesRobots and Service Innovation in Health Care: Essaydavid frybergNo ratings yet
- Onken ReportDocument17 pagesOnken ReportShaoyu WangNo ratings yet
- Lecture #1: Introduction To RoboticsDocument18 pagesLecture #1: Introduction To RoboticsMohsin JunejaNo ratings yet
- ROBOGUIDE - HandlingPRO - 37 PDFDocument2 pagesROBOGUIDE - HandlingPRO - 37 PDFjbw8372No ratings yet
- ProBell 345100EN-IDocument12 pagesProBell 345100EN-IDanaNo ratings yet
- Custom-Built Solutions For Building Construction: Leica iCON BuildDocument6 pagesCustom-Built Solutions For Building Construction: Leica iCON Buildbbutros_317684077No ratings yet
- Sts Reaction FinalDocument3 pagesSts Reaction FinalKristine Jenyl PacificoNo ratings yet