You might also like
- 4 (New9th) 1Document6 pages4 (New9th) 1boltplayz2009No ratings yet
- 9th Physics Chapter 4 NotesDocument4 pages9th Physics Chapter 4 NotesHassan Arslan85% (20)
- Lecture 3 Equilibrium of Bodies IDocument14 pagesLecture 3 Equilibrium of Bodies IAnonymous yorzHjDBdNo ratings yet
- Q 1: Define Like and Unlike Parallel Forces?: A B OA AB OB AB B OB OA AB R A BDocument3 pagesQ 1: Define Like and Unlike Parallel Forces?: A B OA AB OB AB B OB OA AB R A BRiaz Hussain LaghariNo ratings yet
- Equilibrium of Bodies I: and S Apply On ItDocument15 pagesEquilibrium of Bodies I: and S Apply On ItArijit SinghNo ratings yet
- Rigid Body EquilibriumDocument9 pagesRigid Body EquilibriumrislaepiNo ratings yet
- Mat Phy CH 1 To 5Document20 pagesMat Phy CH 1 To 5Kamran SaleemNo ratings yet
- Equilibrium of Bodies Engineering Mechanics IIT KanpurDocument39 pagesEquilibrium of Bodies Engineering Mechanics IIT KanpurNitin SharmaNo ratings yet
- E104 - AgustinDocument19 pagesE104 - AgustinSeth Jarl G. AgustinNo ratings yet
- Equilibrium: ObjectivesDocument15 pagesEquilibrium: ObjectivesrasajatiNo ratings yet
- Physics, Chapter 4: Statics of A Rigid Body: Digitalcommons@University of Nebraska - LincolnDocument21 pagesPhysics, Chapter 4: Statics of A Rigid Body: Digitalcommons@University of Nebraska - LincolnLissa Hannah EtorNo ratings yet
- Turning Effect of ForcesDocument7 pagesTurning Effect of ForcesSyed M HassanNo ratings yet
- Class 10 PhysicsDocument8 pagesClass 10 PhysicsAdil KhanNo ratings yet
- Department of Mechanical Engineering B.E - Iii Year - V Semester Dynamics of Machines Unit I Force AnalysisDocument101 pagesDepartment of Mechanical Engineering B.E - Iii Year - V Semester Dynamics of Machines Unit I Force Analysissuneel kumar rathoreNo ratings yet
- Physics Notes AJk 9th Class Chap4Document3 pagesPhysics Notes AJk 9th Class Chap4Khizer Tariq QureshiNo ratings yet
- Instructional Material PhysicsDocument52 pagesInstructional Material PhysicsLester GarciaNo ratings yet
- Forces: OYEBISI Solomon, PH.D Department of Civil Engineering College of Engineering Covenant UniversityDocument11 pagesForces: OYEBISI Solomon, PH.D Department of Civil Engineering College of Engineering Covenant UniversityIgbereyivwe TejiriNo ratings yet
- APM NotesDocument46 pagesAPM Notesvlavate79No ratings yet
- Lecture 5 ADocument7 pagesLecture 5 ADheyaa Al-JubouriNo ratings yet
- Unit No.1-Force (2) - 1Document11 pagesUnit No.1-Force (2) - 1Mrunali SurwadeNo ratings yet
- Statics: ES 113 Mr. MoadiDocument49 pagesStatics: ES 113 Mr. MoadiDerrick Maatla MoadiNo ratings yet
- Mech223 - Unit 1 and 2 Lecture CompilationDocument17 pagesMech223 - Unit 1 and 2 Lecture CompilationVanessa LuceroNo ratings yet
- Center of GravityDocument21 pagesCenter of GravityAwais Anwar KhanNo ratings yet
- "Don't Be A Normie, I Guess": Invisible MechanicsDocument30 pages"Don't Be A Normie, I Guess": Invisible Mechanicssameeryad72No ratings yet
- Engineering Mechanics I To III Units PDFDocument143 pagesEngineering Mechanics I To III Units PDFAnil KumarNo ratings yet
- Structural Analysis For Architect NotesDocument82 pagesStructural Analysis For Architect NotesALAWI SSEKUBUNGANo ratings yet
- Chapter Four Class 9thDocument11 pagesChapter Four Class 9thAliNo ratings yet
- Applied Mechanics Chapter 3: Moment: Government Polytechnic LucknowDocument24 pagesApplied Mechanics Chapter 3: Moment: Government Polytechnic LucknowTushar KiranNo ratings yet
- Laws of MotionDocument26 pagesLaws of Motionaslamfiza06No ratings yet
- ENGINEERING MECHANICS Module 1Document34 pagesENGINEERING MECHANICS Module 1rout79858No ratings yet
- Unit IDocument10 pagesUnit ISri RNo ratings yet
- Chapter 5 StaticDocument22 pagesChapter 5 Staticnur aisyahNo ratings yet
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDocument21 pagesDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnFelipePacuanBagasbas-CafeIIINo ratings yet
- Unit-1 FMEDocument59 pagesUnit-1 FMEAshish KhariNo ratings yet
- Concepts of Laws of Motion (L.O.M.) Physics For JEE & NEET 2019Document5 pagesConcepts of Laws of Motion (L.O.M.) Physics For JEE & NEET 2019misostudyNo ratings yet
- Engineering Mechanics Module 1Document38 pagesEngineering Mechanics Module 1jzeke senseiNo ratings yet
- Excerpt PDFDocument30 pagesExcerpt PDFMarvinPatricioNarcaNo ratings yet
- 2.lecture 2Document39 pages2.lecture 2JIGME TENZINNo ratings yet
- Engineering Mechanics MCQ QuestionsDocument116 pagesEngineering Mechanics MCQ QuestionsMiral_Kagathra100% (2)
- 2.1lecture 2 (Force System)Document38 pages2.1lecture 2 (Force System)JIGME TENZINNo ratings yet
- Ge8292: Engineering MechanicsDocument13 pagesGe8292: Engineering MechanicsPradeep KumarNo ratings yet
- NTPS Mechanics and Mathematics ReviewDocument66 pagesNTPS Mechanics and Mathematics Reviewshuki456No ratings yet
- Moments of ForceDocument4 pagesMoments of ForceCaseyNo ratings yet
- Icse Physics NotesDocument110 pagesIcse Physics Notess9605519No ratings yet
- Unit 10 Simple Harmonic Motion and WavesDocument12 pagesUnit 10 Simple Harmonic Motion and WavesFroebels InternationalNo ratings yet
- Engineering Mechanics NotesDocument111 pagesEngineering Mechanics NotesAtul GaurNo ratings yet
- Laws of Motion: - Dynamics Is The Branch of Physics in Which We StudyDocument18 pagesLaws of Motion: - Dynamics Is The Branch of Physics in Which We StudyVipeen BendaleNo ratings yet
- Friction AutoDocument24 pagesFriction AutoSayyadh Rahamath BabaNo ratings yet
- Force & Law of MotionDocument16 pagesForce & Law of MotionHitesh MendirattaNo ratings yet
- Statics 1Document38 pagesStatics 1josua jamesNo ratings yet
- Mechanics PortionDocument55 pagesMechanics PortionRupak MandalNo ratings yet
- Law of Motion Class 11 Notes Physics Chapter 5Document13 pagesLaw of Motion Class 11 Notes Physics Chapter 5pujal dabasNo ratings yet
- Froces Notes Dynamics+Deformation+MomentsDocument13 pagesFroces Notes Dynamics+Deformation+MomentsFaiq IrfanNo ratings yet
- Engg. MechanicsDocument29 pagesEngg. MechanicsSunand Pongurlekar100% (1)
- CH 4 - CONCURRENT & PARALLEL FORCESDocument12 pagesCH 4 - CONCURRENT & PARALLEL FORCESP. R. SREENIVASANNo ratings yet
- 9th Class Physics Notes Chapter 4 AjkDocument4 pages9th Class Physics Notes Chapter 4 AjkAsher KabirNo ratings yet
- Mechanics Lab1Document7 pagesMechanics Lab1yogendra kumarNo ratings yet
- Laws of MotionDocument22 pagesLaws of MotionDeepak PandeyNo ratings yet
- TEST1.docx7th BDocument1 pageTEST1.docx7th BFarogh HamidNo ratings yet
- Ipm Quiz 4Document4 pagesIpm Quiz 4Farogh HamidNo ratings yet
- Turning Effect of ForceDocument5 pagesTurning Effect of ForceFarogh HamidNo ratings yet
- WORKSHEET - Docx Zero Error & CorrectioDocument3 pagesWORKSHEET - Docx Zero Error & CorrectioFarogh HamidNo ratings yet
- TEST1.docx o LevelDocument5 pagesTEST1.docx o LevelFarogh HamidNo ratings yet
- WS VectorsDocument3 pagesWS VectorsFarogh HamidNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument20 pagesCambridge International Advanced Subsidiary and Advanced LevelFarogh HamidNo ratings yet
- Worksheet - Docx WS6THlcmDocument1 pageWorksheet - Docx WS6THlcmFarogh HamidNo ratings yet
- Worksheet - Docx Paper 6thDocument3 pagesWorksheet - Docx Paper 6thFarogh HamidNo ratings yet
- 12th Class TestDocument1 page12th Class TestFarogh HamidNo ratings yet
- 11th - Docx11th Test2Document1 page11th - Docx11th Test2Farogh HamidNo ratings yet
- Circular Motion: Round and RoundDocument6 pagesCircular Motion: Round and RoundFarogh HamidNo ratings yet
- Assignment: 02: Name: Shiza FaroghDocument4 pagesAssignment: 02: Name: Shiza FaroghFarogh HamidNo ratings yet
- DC Past Papers PDFDocument12 pagesDC Past Papers PDFFarogh HamidNo ratings yet
- Cambridge International General Certificate of Secondary EducationDocument12 pagesCambridge International General Certificate of Secondary EducationFarogh HamidNo ratings yet
- Assignment No: 3Document3 pagesAssignment No: 3Farogh HamidNo ratings yet
- Band TheoryDocument6 pagesBand TheoryFarogh HamidNo ratings yet
- Commucation WsDocument3 pagesCommucation WsFarogh HamidNo ratings yet
- Light: Secondary 3 PhysicsDocument20 pagesLight: Secondary 3 PhysicsFarogh Hamid100% (1)
- Cavagna On Energy Exchanges in Walking and RunningDocument15 pagesCavagna On Energy Exchanges in Walking and RunningLaboratory in the WildNo ratings yet
- Lab Balancing RotorsDocument6 pagesLab Balancing RotorsshamizNo ratings yet
- Classwork / Assignment: EquilibriumDocument3 pagesClasswork / Assignment: EquilibriumSelwah Hj AkipNo ratings yet
- Dogar General MCQs Physics PDF SolvedDocument59 pagesDogar General MCQs Physics PDF SolvedMuhammad Noman HameedNo ratings yet
- IIT Foundation Olympiad Explorer Class 9 PhysicsDocument26 pagesIIT Foundation Olympiad Explorer Class 9 PhysicsNitesh Dubey50% (2)
- M12 Wolf57139 03 Se C12Document34 pagesM12 Wolf57139 03 Se C12c.s.kalkmanNo ratings yet
- S2 Physics @STAHIZA: Mechanical Properties of MatterDocument71 pagesS2 Physics @STAHIZA: Mechanical Properties of MatterThadnyiang ThaddeusNo ratings yet
- First Long Test in SPS 7Document3 pagesFirst Long Test in SPS 7Dennmark IgutNo ratings yet
- Calculating Commercial Vehicle Weight DistributionDocument8 pagesCalculating Commercial Vehicle Weight DistributiondejejuniorNo ratings yet
- Physics Paper 3 CsecDocument6 pagesPhysics Paper 3 CsecPablo Gomes100% (1)
- Govindanunni P Level - IIDocument3 pagesGovindanunni P Level - IIGovindanunni PadmakumarNo ratings yet
- Chapter 8 Further Applications of IntegrationDocument3 pagesChapter 8 Further Applications of Integration祈翠No ratings yet
- Center of GravityDocument4 pagesCenter of GravityMariel Delos SantosNo ratings yet
- IX PhysicsDocument2 pagesIX PhysicsHumaira KhalilNo ratings yet
- Centroids Formula PDFDocument38 pagesCentroids Formula PDFwelwelNo ratings yet
- Concept of Plant Location Planning in Operations ManagementDocument13 pagesConcept of Plant Location Planning in Operations ManagementGhanshyam KashyapNo ratings yet
- Instruction Manual: Positioner Headstock AII-1PC500/1PC1000Document48 pagesInstruction Manual: Positioner Headstock AII-1PC500/1PC1000karthikeyan19920% (2)
- Sacred Heart Neet Lesson PlanDocument25 pagesSacred Heart Neet Lesson PlanBALAYASJNo ratings yet
- Classical Mechanics MCQsDocument59 pagesClassical Mechanics MCQsZain Ul Abidin100% (4)
- Lecture 9 - Foundations of Reciprocating MachinesDocument53 pagesLecture 9 - Foundations of Reciprocating MachinesMike MatshonaNo ratings yet
- Robot Configuration PDFDocument9 pagesRobot Configuration PDFZied RaouakNo ratings yet
- Lab1-Centre of GravityDocument10 pagesLab1-Centre of GravityNur Syamiza Zamri0% (2)
- HR Om11 ch08Document46 pagesHR Om11 ch08Ferdian ChandraNo ratings yet
- Mechanics I (Statics) Ch-5Document23 pagesMechanics I (Statics) Ch-5Miki AscaNo ratings yet
- Torque, Rotational Equilibrium and Center of Gravity: Gwyneth Marie DayaganDocument5 pagesTorque, Rotational Equilibrium and Center of Gravity: Gwyneth Marie DayaganGwyneth Marie DayaganNo ratings yet
- ES221-2022 FallDocument3 pagesES221-2022 FallAlpay AkpınarNo ratings yet
- Civildatas - Blogspot.in: Unit Iii Properties of Surfaces and Solids 3.1 Centroid and AreasDocument6 pagesCivildatas - Blogspot.in: Unit Iii Properties of Surfaces and Solids 3.1 Centroid and AreasPerumal RavindranNo ratings yet
- Week 011 Rotational Equilibrium and Rotational DynamicsDocument4 pagesWeek 011 Rotational Equilibrium and Rotational DynamicsKenberly DingleNo ratings yet
- Atwood's Machine As A Tool To Introduce Variable Mass SystemsDocument6 pagesAtwood's Machine As A Tool To Introduce Variable Mass Systemsanaklembah@ScribdNo ratings yet
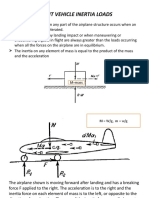
- Flight Vehicle Inertia Loads: M MassDocument12 pagesFlight Vehicle Inertia Loads: M MassJames Russell S. SanchoNo ratings yet