You might also like
- The Pevearsion of Russian LiteratureDocument8 pagesThe Pevearsion of Russian LiteratureStan MazoNo ratings yet
- Myntra Sku Template New ShootDocument204 pagesMyntra Sku Template New ShootPriyal SaxenaNo ratings yet
- Unit 3 2DRV2Document9 pagesUnit 3 2DRV2sajalsinghal1512No ratings yet
- 7. Straight LineDocument84 pages7. Straight LineDevansh ParasharNo ratings yet
- Ara Yanaeducationalsociety: Starsuperchainacampus QuizDocument8 pagesAra Yanaeducationalsociety: Starsuperchainacampus QuizAkshith IsolaNo ratings yet
- Mohr's Circle ExplainedDocument37 pagesMohr's Circle ExplainedMukhtiar Ahmed LakhanNo ratings yet
- 26 dimensions of string theory explainedDocument20 pages26 dimensions of string theory explainedEvelinaNo ratings yet
- The University of Calgary: Schulich School of EngineeringDocument9 pagesThe University of Calgary: Schulich School of EngineeringAzizi3ameelNo ratings yet
- MA1013 Math Course OverviewDocument2 pagesMA1013 Math Course OverviewKaveesha DinamiduNo ratings yet
- I MSC Workshop Talk 4Document20 pagesI MSC Workshop Talk 4Omar KrimouNo ratings yet
- Polar Coordinates Differential Equation - Mathematics Stack ExchangeDocument2 pagesPolar Coordinates Differential Equation - Mathematics Stack ExchangeHector TrianaNo ratings yet
- Lecture 2: Design II: Ch. 3: Load and Stress (Review)Document8 pagesLecture 2: Design II: Ch. 3: Load and Stress (Review)mariaNo ratings yet
- Tuto 82 Vol of Rev ShellDocument4 pagesTuto 82 Vol of Rev ShellAZRI FIRDAUS이광수No ratings yet
- 353bab41-f057-4a0e-87ef-ad41512d9b1d_49044_800_202310021944473810__638318737220349990Document53 pages353bab41-f057-4a0e-87ef-ad41512d9b1d_49044_800_202310021944473810__638318737220349990fatema19447No ratings yet
- Uniformly Accelerated Motion Vuat S Uvt Sut at V U As: MechanicsDocument2 pagesUniformly Accelerated Motion Vuat S Uvt Sut at V U As: Mechanicspatricia eileenNo ratings yet
- ACC Algebra I Formula Sheet 2022Document2 pagesACC Algebra I Formula Sheet 2022Jaylen ShahNo ratings yet
- Specmaths Formula W PDFDocument4 pagesSpecmaths Formula W PDFAO TutoringNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetAishwaryShuklaNo ratings yet
- Sydney Uni MOOC Intro to Calculus Useful FormulaeDocument2 pagesSydney Uni MOOC Intro to Calculus Useful FormulaeSEOW INN LEENo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetAishwaryShuklaNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetZarah Mae BarreyroNo ratings yet
- Math 101 V2aDocument4 pagesMath 101 V2afuck off we need limitsNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetPRINCE KUMARNo ratings yet
- Mass Moment of Inertia FormulasDocument5 pagesMass Moment of Inertia FormulasRadha KrishnaNo ratings yet
- GCL 06Document26 pagesGCL 06sahanishubham317No ratings yet
- Dislocation Stress Fields: Theory of DislocationsDocument17 pagesDislocation Stress Fields: Theory of DislocationsAbdulRehmanNo ratings yet
- Bending StressDocument55 pagesBending StressRishika VitharanaNo ratings yet
- Chap 4a PDFDocument25 pagesChap 4a PDFBolWolNo ratings yet
- 12 Slope of TangentDocument3 pages12 Slope of TangentRia BarianaNo ratings yet
- Sat Math Formulas PDFDocument2 pagesSat Math Formulas PDFkhalsa warriorNo ratings yet
- Nbody DissipativeDocument10 pagesNbody DissipativeFulana SchlemihlNo ratings yet
- An Astronomer's Introduction To Gaussian ProcessesDocument80 pagesAn Astronomer's Introduction To Gaussian ProcessesLillyOpenMindNo ratings yet
- Parametric Representations of Conic SectionsDocument20 pagesParametric Representations of Conic SectionsYusnita Y. Vander LucasNo ratings yet
- Quantum Mechanical treatment of the hydrogen atomDocument14 pagesQuantum Mechanical treatment of the hydrogen atomr prathapNo ratings yet
- K03052 - 20200424155900 - 6.2 Applications of Integration - Volumes of RevolutionDocument22 pagesK03052 - 20200424155900 - 6.2 Applications of Integration - Volumes of Revolutionhariz syazwan100% (1)
- Quantum Mechanics and The Hydrogen AtomDocument19 pagesQuantum Mechanics and The Hydrogen AtomIoan Paul PârleaNo ratings yet
- Mechanics of Materials Formula SheetDocument3 pagesMechanics of Materials Formula SheetSam ReyesNo ratings yet
- Analytic GeometryDocument10 pagesAnalytic GeometryshaitoNo ratings yet
- Tutorial 5Document2 pagesTutorial 5Abhishek KumarNo ratings yet
- Hydrogen Atom WavefunctionsDocument53 pagesHydrogen Atom WavefunctionsGagan JainNo ratings yet
- Act-Sat Formulas NotesDocument3 pagesAct-Sat Formulas Notesapi-372775136No ratings yet
- Ellipse AlgorithmDocument16 pagesEllipse AlgorithmshiyamNo ratings yet
- A Circle of Radius 3 Can Be Expressed in A Number of Ways: Planar CurvesDocument21 pagesA Circle of Radius 3 Can Be Expressed in A Number of Ways: Planar CurvestrijrajNo ratings yet
- Nilsson DoctDocument27 pagesNilsson DoctranitaNo ratings yet
- Fundamental Concepts of Analytic GeometryDocument11 pagesFundamental Concepts of Analytic GeometryShela RamosNo ratings yet
- Tuto 79 Vol of Rev ShellDocument5 pagesTuto 79 Vol of Rev ShellAZRI FIRDAUS이광수No ratings yet
- MIT2 25F13 Solution6.4 PDFDocument5 pagesMIT2 25F13 Solution6.4 PDFfunk singhNo ratings yet
- Division of Line SegmentDocument2 pagesDivision of Line Segmentprince ian cruzNo ratings yet
- Mohr's Circle For Stress: Stress. It Is Named After The German Engineer Otto Mohr (l835-1918) Who Devised It inDocument18 pagesMohr's Circle For Stress: Stress. It Is Named After The German Engineer Otto Mohr (l835-1918) Who Devised It inzain ahmadNo ratings yet
- Practice Questions: Terry Lee Advanced MathematicsDocument3 pagesPractice Questions: Terry Lee Advanced MathematicsEren SevinceNo ratings yet
- Circle - Mind Maps - Prayas JEE 2024Document4 pagesCircle - Mind Maps - Prayas JEE 2024Shubham SarkarNo ratings yet
- Design ComputationsDocument9 pagesDesign ComputationsMark Chester KaraanNo ratings yet
- Math 55 1st Exam ReviewerDocument2 pagesMath 55 1st Exam ReviewerTidal SurgesNo ratings yet
- Solution For 2016 Theoretical PhysDocument16 pagesSolution For 2016 Theoretical PhysageofzombiesNo ratings yet
- AEP 3330 Final - Some EquationsDocument1 pageAEP 3330 Final - Some EquationsJesse ZhangNo ratings yet
- C4 Integration I - QuestionsDocument2 pagesC4 Integration I - Questionspillboxsesame0sNo ratings yet
- WINSEM2019-20 MEE1002 TH VL2019205001826 Reference Material I 29-Jan-2020 Moment of InteriaDocument72 pagesWINSEM2019-20 MEE1002 TH VL2019205001826 Reference Material I 29-Jan-2020 Moment of InteriaArkadeep MukherjeeNo ratings yet
- DPP 39Document4 pagesDPP 39mmoriarity309No ratings yet
- Thin plate bending theoryDocument4 pagesThin plate bending theorykhanh210263No ratings yet
- Beams On Elastic Foundations TheoryDocument15 pagesBeams On Elastic Foundations TheoryCharl de Reuck100% (1)
- Beams On Elastic Foundation-1Document15 pagesBeams On Elastic Foundation-1Anonymous 0tT3SeNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Frequency of guitar stringsDocument24 pagesFrequency of guitar stringspm engineeringsNo ratings yet
- 20220825022418am 1460238122 10595448 1852907624 - Ahl23Document7 pages20220825022418am 1460238122 10595448 1852907624 - Ahl23pm engineeringsNo ratings yet
- 20220825033058am 903721208 10595612 127487359 - Ahl23Document3 pages20220825033058am 903721208 10595612 127487359 - Ahl23pm engineeringsNo ratings yet
- 20220824135352PM 1783423228 10594740 1111645661 - Ahl23Document2 pages20220824135352PM 1783423228 10594740 1111645661 - Ahl23pm engineeringsNo ratings yet
- 20220824131830PM 1920823208 10594659 1431119201 - CLT289954Document2 pages20220824131830PM 1920823208 10594659 1431119201 - CLT289954pm engineeringsNo ratings yet
- Advanced Features and Troubleshooting ManualDocument138 pagesAdvanced Features and Troubleshooting ManualHugo Manuel Sánchez MartínezNo ratings yet
- Simple BoxDocument104 pagesSimple BoxTÙNGNo ratings yet
- Learning and Teaching in The Clinical EnvironmentDocument4 pagesLearning and Teaching in The Clinical EnvironmentDaniel Alejandro Lozano MorenoNo ratings yet
- IBM Global Business ServicesDocument16 pagesIBM Global Business Servicesamitjain310No ratings yet
- BSM and NSM Best Practice 66Document67 pagesBSM and NSM Best Practice 66Freelancer83No ratings yet
- Acoustic EmissionDocument11 pagesAcoustic Emissionuyenowen@yahoo.comNo ratings yet
- azezew(1)Document48 pagesazezew(1)temesgen AsmamawNo ratings yet
- Connected Topological Spaces: Definition 3.1.1Document22 pagesConnected Topological Spaces: Definition 3.1.1WilmerAlexanderVivasNogueraNo ratings yet
- Centrifuge PDFDocument11 pagesCentrifuge PDFسراء حيدر كاظمNo ratings yet
- (已压缩)721 260 PBDocument879 pages(已压缩)721 260 PBflorexxi19No ratings yet
- You Said It's Called Supreme Mathematics RightDocument2 pagesYou Said It's Called Supreme Mathematics RightAuMatu89% (9)
- 15 I Have Done (Present Perfect 1) : My SHDocument12 pages15 I Have Done (Present Perfect 1) : My SHBatatinha Quando nasceNo ratings yet
- Visulas Yag III User ManualDocument126 pagesVisulas Yag III User ManualTomNo ratings yet
- Social Studies For Brunei Darussalam Year 8 TextbookDocument152 pagesSocial Studies For Brunei Darussalam Year 8 TextbookChai Wei Chen100% (1)
- Darius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Document1 pageDarius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Kristilla Anonuevo CardonaNo ratings yet
- Ael Coal To PVCDocument2 pagesAel Coal To PVCdeepak saxenaNo ratings yet
- Madhwacharya ' S Lineage - "GURU CHARITE"Document136 pagesMadhwacharya ' S Lineage - "GURU CHARITE"Srivatsa100% (4)
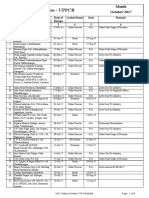
- NOC Status for UPPCB in October 2017Document6 pagesNOC Status for UPPCB in October 2017Jeevan jyoti vnsNo ratings yet
- Idebenone Increases Chance of StabilizationrecoverDocument5 pagesIdebenone Increases Chance of StabilizationrecoverRaluca PascalauNo ratings yet
- GH Bhandara RTPCR Reports From Aiims Nagpur 05.05.2023Document15 pagesGH Bhandara RTPCR Reports From Aiims Nagpur 05.05.2023Aditi NadangeNo ratings yet
- Batch Op LOPA WorksheetDocument35 pagesBatch Op LOPA WorksheetShruti JoshiNo ratings yet
- PDFDocument478 pagesPDFPriyaranjan PradhanNo ratings yet
- FINANCE Company SlidersDocument10 pagesFINANCE Company SlidersKartik PanwarNo ratings yet
- House (Sometimes Known As House, M.D.) Is An American TelevisionDocument17 pagesHouse (Sometimes Known As House, M.D.) Is An American Televisionpichi94No ratings yet
- Uss Port Royal (CG 73)Document9 pagesUss Port Royal (CG 73)samlagroneNo ratings yet
- NB-CPR 17-722r8 - General Guidance On AVCP (Working Copy)Document25 pagesNB-CPR 17-722r8 - General Guidance On AVCP (Working Copy)halexing5957No ratings yet
- Energy Savings White PaperDocument14 pagesEnergy Savings White PapersajuhereNo ratings yet