You might also like
- Asmeviii Uw PPT 140819093515 Phpapp02 PDFDocument196 pagesAsmeviii Uw PPT 140819093515 Phpapp02 PDFMohamed Abd El DayemNo ratings yet
- Code No. 8603: Osmania University Faculty of EngineeringDocument2 pagesCode No. 8603: Osmania University Faculty of EngineeringSuresh ReddyNo ratings yet
- Training-Library RF Tower ConstructionDocument57 pagesTraining-Library RF Tower ConstructionAhmed shabanNo ratings yet
- Ge Semiconductor Detector Nai (Ti) Food Monitor Whole Body CounterDocument18 pagesGe Semiconductor Detector Nai (Ti) Food Monitor Whole Body CounterAhmed shabanNo ratings yet
- Certification Board Guide For The Steam Portion of The Machinery Inspector-Steam PQSDocument9 pagesCertification Board Guide For The Steam Portion of The Machinery Inspector-Steam PQSKQCMSBlogNo ratings yet
- Government Gazette Staatskoerant: Republic of South Africa Republiek Van Suid-AfrikaDocument28 pagesGovernment Gazette Staatskoerant: Republic of South Africa Republiek Van Suid-AfrikagNo ratings yet
- SRP Lesson Plan 3 Everyday ItemsDocument3 pagesSRP Lesson Plan 3 Everyday ItemsAhmed shabanNo ratings yet
- Risks in Perspective 1 (Risks To Die For)Document1 pageRisks in Perspective 1 (Risks To Die For)Ahmed shabanNo ratings yet
- Radiological Protection System: International OrganizationsDocument11 pagesRadiological Protection System: International OrganizationsAhmed shabanNo ratings yet
- Fresh Water and Seawater Properties GuideDocument45 pagesFresh Water and Seawater Properties GuideIgnatius SamrajNo ratings yet
- Training Library Sarsrev1Document18 pagesTraining Library Sarsrev1Ahmed shabanNo ratings yet
- Three Principles of Reduction of External ExposureDocument3 pagesThree Principles of Reduction of External ExposureAhmed shabanNo ratings yet
- Vibration Analysis Ebook MaterialDocument8 pagesVibration Analysis Ebook MaterialMohamed KhaledNo ratings yet
- Comparison Between ICRP Recommendations and Domestic Laws and RegulationsDocument4 pagesComparison Between ICRP Recommendations and Domestic Laws and RegulationsAhmed shabanNo ratings yet
- Basic 1st 04 02 SlidesDocument4 pagesBasic 1st 04 02 SlidesAhmed shabanNo ratings yet
- Non Nuclear Uses 7 (Lab Tracers)Document1 pageNon Nuclear Uses 7 (Lab Tracers)Ahmed shabanNo ratings yet
- Chapter 4bDocument33 pagesChapter 4bAhmed shabanNo ratings yet
- Road Safety: Improving Safety On Our Roads - Days A YearDocument12 pagesRoad Safety: Improving Safety On Our Roads - Days A YearAndile NtuliNo ratings yet
- Wood Inspection ReportDocument29 pagesWood Inspection ReportssNo ratings yet
- International Organizations: Research On Radiation Effects Research On Radiation SafetyDocument11 pagesInternational Organizations: Research On Radiation Effects Research On Radiation SafetyAhmed shabanNo ratings yet
- NORM 2 (Oil and Gas Industry Naturally Occurring Radioactive Material)Document1 pageNORM 2 (Oil and Gas Industry Naturally Occurring Radioactive Material)Ahmed shabanNo ratings yet
- MOU Part 7 July21 PDFDocument213 pagesMOU Part 7 July21 PDFSusmit WalavalkarNo ratings yet
- Valve template lifting planDocument50 pagesValve template lifting planpgsita tvNo ratings yet
- 70 Number 2 - 2021 Special Issue: ISSN 1849-0751 (On-Line) ISSN 0013-7448 (Print) UDK 621.31Document24 pages70 Number 2 - 2021 Special Issue: ISSN 1849-0751 (On-Line) ISSN 0013-7448 (Print) UDK 621.31Elizabeth WilliamsNo ratings yet
- (I) Keep Away (Ii) Place Something Heavy in Between (Iii) Shorten Time While Being Close To Radioactive MaterialsDocument3 pages(I) Keep Away (Ii) Place Something Heavy in Between (Iii) Shorten Time While Being Close To Radioactive MaterialsAhmed shabanNo ratings yet
- Basic 1st Vol1Document254 pagesBasic 1st Vol1Ahmed shabanNo ratings yet
- Navsea 9997 1 83Document9 pagesNavsea 9997 1 83Anbarasan AnandhanNo ratings yet
- QC ReportDocument10 pagesQC Reporthainguyenbkvhv100% (1)
- 452 ZambranoOteroDocument1 page452 ZambranoOteroAnbarasan PerumalNo ratings yet
- How to Read Elcometer 106 Adhesion Test ResultsDocument9 pagesHow to Read Elcometer 106 Adhesion Test Resultshainguyenbkvhv100% (1)
- Prop Tips 03Document3 pagesProp Tips 03swapneel_kulkarniNo ratings yet
- Basic 1st Vol2Document206 pagesBasic 1st Vol2Ahmed shabanNo ratings yet
- Training-Library Laser Rmcoeh 20021007Document33 pagesTraining-Library Laser Rmcoeh 20021007Ahmed shabanNo ratings yet
- LEEA Oil & Gas Webinar Presentation - 280422Document27 pagesLEEA Oil & Gas Webinar Presentation - 280422Mohammed Ahmed NasherNo ratings yet
- Communicating Radiation RiskDocument20 pagesCommunicating Radiation RiskAhmed shabanNo ratings yet
- PIPE LAY BARGE ONASIS 10Document3 pagesPIPE LAY BARGE ONASIS 10Muhammad RIZALNo ratings yet
- Leea Question and Answer 2cDocument3 pagesLeea Question and Answer 2cYAKUBU A. AROGENo ratings yet
- L4-UAE-046C (Rev 4) Radiographic Examination Procedure (Scar System)Document21 pagesL4-UAE-046C (Rev 4) Radiographic Examination Procedure (Scar System)Rahul DubeyNo ratings yet
- Vac Box Bubble Leak Testing AcessoriesDocument4 pagesVac Box Bubble Leak Testing AcessoriessbmmlaNo ratings yet
- Hume City Council Events StrategyDocument28 pagesHume City Council Events StrategyAndile NtuliNo ratings yet
- ISO 23278 (2006) - Magnetic Particle Testing of Weld - Acceptance LevelsDocument8 pagesISO 23278 (2006) - Magnetic Particle Testing of Weld - Acceptance Levels_PiperCub_No ratings yet
- Nuclear Power 3 (Fuel Cycle)Document1 pageNuclear Power 3 (Fuel Cycle)Ahmed shabanNo ratings yet
- EU Use of Work Equipment Legislation GuideDocument36 pagesEU Use of Work Equipment Legislation GuideGaniyuNo ratings yet
- Rail Transport IntroDocument24 pagesRail Transport IntroMeg TNo ratings yet
- LEEA Lifting and Slinging Course OutlineDocument4 pagesLEEA Lifting and Slinging Course OutlineSankaranarayananNo ratings yet
- The Imo Performance Standard For ProtectDocument34 pagesThe Imo Performance Standard For ProtectBranko Brezec100% (1)
- 01 Vo-2 Specification (R) of Keel Wooden Block (r2)Document7 pages01 Vo-2 Specification (R) of Keel Wooden Block (r2)ssNo ratings yet
- Health and Safety Act 1974 dutiesDocument6 pagesHealth and Safety Act 1974 dutiesvenkateshNo ratings yet
- Isotrend Ir 192 Brochure PDFDocument2 pagesIsotrend Ir 192 Brochure PDFSafiq UddinNo ratings yet
- Definition of Lifting EquipmentDocument4 pagesDefinition of Lifting Equipmentadriancovalciuc4863No ratings yet
- Ultrasonic TestingDocument278 pagesUltrasonic TestingSalvatore LombardoNo ratings yet
- Technical Capabilities 2016 PDFDocument22 pagesTechnical Capabilities 2016 PDFvignesh seenirajNo ratings yet
- LEEA-059-1 Documentation and Marking - Part 1 Manual Lifting Machines - Version 2 PDFDocument14 pagesLEEA-059-1 Documentation and Marking - Part 1 Manual Lifting Machines - Version 2 PDFopreamihNo ratings yet
- PW 371Document150 pagesPW 371Patrick SilberbauerNo ratings yet
- Eddy-Current Testing - Wikipedia PDFDocument5 pagesEddy-Current Testing - Wikipedia PDFVysakh VasudevanNo ratings yet
- CSWIP 3.1 Multiple Choice-4Document32 pagesCSWIP 3.1 Multiple Choice-4randhir kumar jhaNo ratings yet
- Liquid Penetrant TestingDocument22 pagesLiquid Penetrant TestingNishant SinghNo ratings yet
- Cobalt ml3 User Guide ItDocument43 pagesCobalt ml3 User Guide ItSandro RebecNo ratings yet
- RT025 UG R3000-Lite V3.0.10Document111 pagesRT025 UG R3000-Lite V3.0.10Gunawan WibisonoNo ratings yet
- Manual CP-8000 CP-802x ENG DC8-037-2.06Document1,924 pagesManual CP-8000 CP-802x ENG DC8-037-2.06Ricardo Possidonio100% (1)
- G-TE-003-01 Work Instruction Guidline For Flat Webbing Slings Needs ReviewDocument3 pagesG-TE-003-01 Work Instruction Guidline For Flat Webbing Slings Needs ReviewbeshoyNo ratings yet
- Chain Slings Inspection GuideDocument4 pagesChain Slings Inspection GuidebeshoyNo ratings yet
- G-TE-001-00 Work Instruction Guidline For ShacklesDocument3 pagesG-TE-001-00 Work Instruction Guidline For ShacklesbeshoyNo ratings yet
- G-TE-002-00 Work Instruction Guidline For Wire Rope SlingsDocument3 pagesG-TE-002-00 Work Instruction Guidline For Wire Rope SlingsbeshoyNo ratings yet
- The Management of Health and Safety at Work RegulationDocument18 pagesThe Management of Health and Safety at Work RegulationbeshoyNo ratings yet
- BS en Iso 10855-3-2018Document26 pagesBS en Iso 10855-3-2018beshoyNo ratings yet
- Quantum SkillUp Work Instruction Manual For Spreader BeamsDocument2 pagesQuantum SkillUp Work Instruction Manual For Spreader BeamsbeshoyNo ratings yet
- Iso 10855 3Document24 pagesIso 10855 3beshoyNo ratings yet
- Iso 10855 2 2Document22 pagesIso 10855 2 2beshoyNo ratings yet
- Tower Crane ChecklistDocument1 pageTower Crane ChecklistbeshoyNo ratings yet
- Risk Assessment FormDocument4 pagesRisk Assessment Formbeshoy100% (2)
- QS Seamless Aluminum Ferrules Safe Use and Instructions V01Document6 pagesQS Seamless Aluminum Ferrules Safe Use and Instructions V01beshoyNo ratings yet
- Rigging Safety in Cranes PDFDocument170 pagesRigging Safety in Cranes PDFLuis AcuaNo ratings yet
- Lever Hoist ManualDocument40 pagesLever Hoist Manualbeshoy100% (1)
- CranesDocument36 pagesCranesbeshoy100% (4)
- Ritchie's Crane Safety QuizDocument21 pagesRitchie's Crane Safety QuizJuned Hamid Khan0% (1)
- Firepro-Kentec Sequential Activator: Data SheetDocument7 pagesFirepro-Kentec Sequential Activator: Data SheetMR RNo ratings yet
- Dual, 8-Bit, Voltage-Output Serial DAC in 8-Pin SO PackageDocument12 pagesDual, 8-Bit, Voltage-Output Serial DAC in 8-Pin SO PackagemvpgmNo ratings yet
- Talcyon APRIS Tube Inspection System DatasheetDocument2 pagesTalcyon APRIS Tube Inspection System Datasheetmohamed ghareebNo ratings yet
- Lesson 1 Hard Wiring Lesson 2 PLC Troubleshooting and Preventive MaintenanceDocument5 pagesLesson 1 Hard Wiring Lesson 2 PLC Troubleshooting and Preventive MaintenanceKurisuchan WolfNo ratings yet
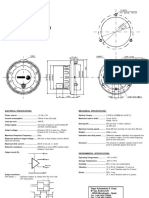
- Vibração SensorDocument4 pagesVibração SensorLourismar VicenteNo ratings yet
- Fisheasy 250 Ds & Seafinder 250 DF: Installation and Operation InstructionsDocument72 pagesFisheasy 250 Ds & Seafinder 250 DF: Installation and Operation InstructionsstaicuNo ratings yet
- Bascule JKDocument9 pagesBascule JKOussema HamzaNo ratings yet
- Group-3 Reliance Industries LTD Case Study PrersentationDocument28 pagesGroup-3 Reliance Industries LTD Case Study PrersentationF13 NIECNo ratings yet
- Man Handwheel UfoDocument2 pagesMan Handwheel UfoAloisio GonzagaNo ratings yet
- (1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatDocument5 pages(1-5) CE GESTURE CONTROLLED WHEELCHAIR-formatAKHILNo ratings yet
- Honeywell Cs071ae Evaporative Cooler Owner's Manual PDFDocument22 pagesHoneywell Cs071ae Evaporative Cooler Owner's Manual PDFAlbert TaczNo ratings yet
- EET463 M1 Ktunotes - inDocument60 pagesEET463 M1 Ktunotes - inAlwin Jose AdamNo ratings yet
- OsiSense XC - XCKJ161Document8 pagesOsiSense XC - XCKJ161Dicky EkaNo ratings yet
- Lab Iv. Silicon Diode Characteristics: 1. ObjectiveDocument9 pagesLab Iv. Silicon Diode Characteristics: 1. ObjectiveRaja MariyappanNo ratings yet
- EC COMMUNICATION ENGINEERING EXAM QUESTIONSDocument18 pagesEC COMMUNICATION ENGINEERING EXAM QUESTIONSAnonymous yO7rcec6vuNo ratings yet
- InfiniSolar V II-3P-6KW-9KW-15KWDocument1 pageInfiniSolar V II-3P-6KW-9KW-15KWHusam Apoud100% (1)
- Push-Pull Amplifier Circuit Class A B Amp AB Amplifier CircuitsDocument6 pagesPush-Pull Amplifier Circuit Class A B Amp AB Amplifier CircuitsDan BosakNo ratings yet
- High Speed Tripping Relay: For Fast and Secure Multi-Trip Protection ApplicationsDocument8 pagesHigh Speed Tripping Relay: For Fast and Secure Multi-Trip Protection ApplicationsMehmood AhmadNo ratings yet
- DCM 120keDocument70 pagesDCM 120keItech MpNo ratings yet
- Solved ISRO Scientist or Engineer Electronics 2006 Paper With SolutionsDocument23 pagesSolved ISRO Scientist or Engineer Electronics 2006 Paper With SolutionsAnitha JersonNo ratings yet
- Impact of Impurities, Interface Traps and Contacts On MoS2 MOSFETs - Modelling and ExperimentsDocument4 pagesImpact of Impurities, Interface Traps and Contacts On MoS2 MOSFETs - Modelling and ExperimentsdebanjanfinNo ratings yet
- Crane's PLCDocument15 pagesCrane's PLCElectrifying GuyNo ratings yet
- IGEE 401 - Power Electronic Systems Solution To Midterm Examination Fall 2004Document9 pagesIGEE 401 - Power Electronic Systems Solution To Midterm Examination Fall 2004marina silvaNo ratings yet
- Mototrbo Portable Dep 450 Basic Service ManualDocument95 pagesMototrbo Portable Dep 450 Basic Service ManualAyon BaxterNo ratings yet
- STAMFORD Industrial Ratings Book Edition 3.1Document102 pagesSTAMFORD Industrial Ratings Book Edition 3.1mohsen_cumminsNo ratings yet
- NycoCard Reader Instruction Manual BookDocument4 pagesNycoCard Reader Instruction Manual Bookbhezos100% (3)
- TGS 2611C00 (1013)Document2 pagesTGS 2611C00 (1013)R GikiswantoNo ratings yet
- Badc 2020 01Document5 pagesBadc 2020 01Sk Ahmad FaridNo ratings yet
- Transformers to Convert Three-Phase Power to Two-Phase Power RatingsDocument1 pageTransformers to Convert Three-Phase Power to Two-Phase Power RatingsToper GarciaNo ratings yet
- Umbrella Tool Changer - Set Parameter 257 - Spindle Orientation OffsetDocument3 pagesUmbrella Tool Changer - Set Parameter 257 - Spindle Orientation Offset2aicnNo ratings yet