You might also like
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDocument7 pagesAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseNo ratings yet
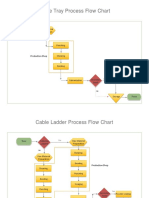
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- NetWorking Flashcards - QuizletDocument262 pagesNetWorking Flashcards - QuizletGB ReddyNo ratings yet
- Tips On Fatigue - NAVWEPS 00-25-559Document123 pagesTips On Fatigue - NAVWEPS 00-25-559Mark Evan SalutinNo ratings yet
- Lukong Cornelius Fai - Feynman Path Integrals in Quantum Mechanics and Statistical Physics-CRC Press (2021)Document415 pagesLukong Cornelius Fai - Feynman Path Integrals in Quantum Mechanics and Statistical Physics-CRC Press (2021)Vi Kem100% (1)
- Model Predictive Control of A DC-DC Buck ConverterDocument7 pagesModel Predictive Control of A DC-DC Buck ConverterMeral MeralNo ratings yet
- A Guide to Chemical Classification of Common Volcanic RocksDocument26 pagesA Guide to Chemical Classification of Common Volcanic RocksPepeeJh VaargasNo ratings yet
- A Doubly Grounded Boost Seven Level PV Inverter Topology With Model Predictive ControllerDocument6 pagesA Doubly Grounded Boost Seven Level PV Inverter Topology With Model Predictive ControllerRodovarNo ratings yet
- Multilevel Topologies. Josep PauDocument32 pagesMultilevel Topologies. Josep PauJose ManuelNo ratings yet
- Hu Hao Liu Yang Zhang JianhuaDocument8 pagesHu Hao Liu Yang Zhang JianhuaMagraoui AbdelkadirNo ratings yet
- Identification of Parameters For Coupling CapacitoDocument7 pagesIdentification of Parameters For Coupling CapacitoPedro OcantoNo ratings yet
- 70.1 02 PDFDocument14 pages70.1 02 PDFyounesNo ratings yet
- Wakodikar 2020Document6 pagesWakodikar 2020mohamed redaNo ratings yet
- PCM BuckboostDocument5 pagesPCM BuckboostDipanjan DasNo ratings yet
- Real Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDocument6 pagesReal Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDaniel PinedaNo ratings yet
- Modeling Front-End Converters: and Control of Three-Phase ActiveDocument6 pagesModeling Front-End Converters: and Control of Three-Phase ActiveAjay BhosaleNo ratings yet
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorDocument6 pagesDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdNo ratings yet
- 2 LVL PDFDocument7 pages2 LVL PDFakun gamingjNo ratings yet
- SEPIC Converter: A Modified Boost-Buck DC-DC ConverterDocument15 pagesSEPIC Converter: A Modified Boost-Buck DC-DC ConverterAbhi NáyNo ratings yet
- Intentional Islanded Operation of Converter Fed MicrogridsDocument6 pagesIntentional Islanded Operation of Converter Fed MicrogridssunitharajababuNo ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- Review of Linear and Nonlinear Current Control Techniques For PWM Three Phase VSC Converters IJERTV7IS020134Document13 pagesReview of Linear and Nonlinear Current Control Techniques For PWM Three Phase VSC Converters IJERTV7IS020134farhat asimNo ratings yet
- Comparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic ModelsDocument10 pagesComparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic ModelsRodrigo Teixeira PintoNo ratings yet
- Multilevel Inverter With Reduced Number of Switches: Arun - Thorat@ritindia - EduDocument5 pagesMultilevel Inverter With Reduced Number of Switches: Arun - Thorat@ritindia - EduagastinNo ratings yet
- Term Paper 2015Document13 pagesTerm Paper 2015Baijayanti DasNo ratings yet
- 9 - Modelling of A ZVS Full Bridge DC-DC Converter For Photovoltaic ApplicationsDocument6 pages9 - Modelling of A ZVS Full Bridge DC-DC Converter For Photovoltaic ApplicationsSouhail BarakatNo ratings yet
- Dupont 2015Document6 pagesDupont 2015Santhosh H ANo ratings yet
- Transformer Less DC - DC Converter With High Step Up Voltage Gain MethodDocument6 pagesTransformer Less DC - DC Converter With High Step Up Voltage Gain Methodsurendiran123No ratings yet
- Art3 - (S1), Florian Ion, 17-22Document6 pagesArt3 - (S1), Florian Ion, 17-22camiloNo ratings yet
- ZE050202290236-1Document9 pagesZE050202290236-1abhishek tiwariNo ratings yet
- Generalized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevDocument5 pagesGeneralized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevVenkatesan SwamyNo ratings yet
- Parameter Plane Synthesis of a Three-Phase Three-Level Bidirectional RectifierDocument9 pagesParameter Plane Synthesis of a Three-Phase Three-Level Bidirectional RectifierDr. Nitin LangerNo ratings yet
- 219 E603Document4 pages219 E603ptarwatkarNo ratings yet
- BuckDocument8 pagesBuckWoldie KassieNo ratings yet
- Sliding Mode Control of Vienna Rectifier With Output Voltage ControlDocument7 pagesSliding Mode Control of Vienna Rectifier With Output Voltage ControlInternational Journal of Latest Research in Engineering and TechnologyNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- 2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodDocument10 pages2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodNguyễn Nhật TưởngNo ratings yet
- ZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyDocument6 pagesZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyPradhapndkNo ratings yet
- 3-2power Electronics Lab ManualDocument50 pages3-2power Electronics Lab ManualSivareddy MudiyalaNo ratings yet
- Analysis of SEPIC for PV using PI and Current Mode ControlDocument4 pagesAnalysis of SEPIC for PV using PI and Current Mode ControlSindhujaSindhuNo ratings yet
- Lab Manual STDocument68 pagesLab Manual STAlex MutiuNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- Modulation and Control of Grid ConvertersDocument49 pagesModulation and Control of Grid Convertersali ghalibNo ratings yet
- Analysis Vienna RectifierDocument8 pagesAnalysis Vienna RectifierJose Luis RomeroNo ratings yet
- Energies 12 00031Document18 pagesEnergies 12 00031Nassima BekhouchaNo ratings yet
- WTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For WecsDocument7 pagesWTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For Wecsdaiduongxanh14113No ratings yet
- Cleveland State University: Department of Electrical and Computer EngineeringDocument5 pagesCleveland State University: Department of Electrical and Computer EngineeringAbhishek SaliyaNo ratings yet
- Research On Dynamic Model and DecouplingDocument4 pagesResearch On Dynamic Model and DecouplingFelix GamarraNo ratings yet
- Exp 5Document16 pagesExp 5neelu marturuNo ratings yet
- Modeling and Simulation of a Chain Link STATCOMDocument8 pagesModeling and Simulation of a Chain Link STATCOMBožidar Filipović-GrčićNo ratings yet
- Single Phase Full Bridge Inverter With Coupled Filter Inductors and Voltage Doubler For PV Module Integrated Converter SystemDocument7 pagesSingle Phase Full Bridge Inverter With Coupled Filter Inductors and Voltage Doubler For PV Module Integrated Converter Systemd_wiNo ratings yet
- Ze050202290236 1Document9 pagesZe050202290236 1138 GowriNo ratings yet
- Observability and Sliding Mode Observer Design For Multi-Cell Series ConverterDocument6 pagesObservability and Sliding Mode Observer Design For Multi-Cell Series ConverterSana OthmanNo ratings yet
- SpaceVector PWM InverteDocument27 pagesSpaceVector PWM InverteShoaib KhizerNo ratings yet
- Am Generation PDFDocument7 pagesAm Generation PDFDeepuk KumarNo ratings yet
- European Journal of Electrical Engineering: Received: 10 March 2020 Accepted: 6 May 2020Document9 pagesEuropean Journal of Electrical Engineering: Received: 10 March 2020 Accepted: 6 May 2020farid kerroucheNo ratings yet
- MMC Documentation EMTPDocument36 pagesMMC Documentation EMTPmancolmoNo ratings yet
- Application of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemDocument12 pagesApplication of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemZikra ElninoNo ratings yet
- Modeling and Control of Two DC-DC Convertes Used in A Resonant Dual Active BridgeDocument5 pagesModeling and Control of Two DC-DC Convertes Used in A Resonant Dual Active BridgeJose ManuelNo ratings yet
- Dual Boost Rectifier-Buck AC-AC PDFDocument5 pagesDual Boost Rectifier-Buck AC-AC PDFBui DaiNo ratings yet
- Predictive Current Control With Reduction of Switching Frequency For Three Phase VoltageDocument6 pagesPredictive Current Control With Reduction of Switching Frequency For Three Phase Voltagedaiduongxanh14113No ratings yet
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDocument7 pagesDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniNo ratings yet
- Rotor Disc ProiectDocument4 pagesRotor Disc ProiecttarnaNo ratings yet
- 07-01-2022 - EEE3100S 2022 November EXAM - 2Document6 pages07-01-2022 - EEE3100S 2022 November EXAM - 2Stalin KosterNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Model Predictive Control of Grid-Tied Four-Level Diode-Clamped Inverters For High Power Wind Energy Conversion SystemsDocument13 pagesModel Predictive Control of Grid-Tied Four-Level Diode-Clamped Inverters For High Power Wind Energy Conversion Systemschikha saidNo ratings yet
- Three Phase Power Electronics Controlled RectifiersDocument31 pagesThree Phase Power Electronics Controlled RectifiersMihalis Ropis100% (1)
- Venkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEDocument11 pagesVenkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEchikha saidNo ratings yet
- Predictive DC Voltage Control For Three-Phase Grid-Connected PV Inverters Based On Energy Balance ModelingDocument4 pagesPredictive DC Voltage Control For Three-Phase Grid-Connected PV Inverters Based On Energy Balance Modelingchikha saidNo ratings yet
- 3 VectorsdeadbeatDocument9 pages3 Vectorsdeadbeatchikha saidNo ratings yet
- 10 1109@precede 2019 8753357Document5 pages10 1109@precede 2019 8753357chikha saidNo ratings yet
- A Tool For Facilitating The Automated Assessment of Engineering/ Science CoursesDocument13 pagesA Tool For Facilitating The Automated Assessment of Engineering/ Science Courseschikha saidNo ratings yet
- Predictive direct power control for photovoltaic systemsDocument10 pagesPredictive direct power control for photovoltaic systemschikha saidNo ratings yet
- Optimal Control of Variable Speed Wind TurbinesDocument7 pagesOptimal Control of Variable Speed Wind Turbineschikha saidNo ratings yet
- Predictive Control of A Three-Phase Neutral-Point-Clamped Inverter PDFDocument9 pagesPredictive Control of A Three-Phase Neutral-Point-Clamped Inverter PDFDavid RomeroNo ratings yet
- Imp - A Survey On Neutral-Point-Clamped InvertersDocument12 pagesImp - A Survey On Neutral-Point-Clamped InvertersVenkataramdas BonamNo ratings yet
- STK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverDocument11 pagesSTK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverGerardo WarmerdamNo ratings yet
- Quickspecs: HP Z840 WorkstationDocument108 pagesQuickspecs: HP Z840 WorkstationAbraham Leon GuardalesNo ratings yet
- AOC L19W931 22W931 SvcMnlsDocument88 pagesAOC L19W931 22W931 SvcMnlsavrelecNo ratings yet
- TermoooDocument11 pagesTermoooJay-r Capate TanNo ratings yet
- Solve Equations and InequalitiesDocument13 pagesSolve Equations and InequalitiesFons Roxas-ChuaNo ratings yet
- Cold Rolled Steel Sections - Specification: Kenya StandardDocument21 pagesCold Rolled Steel Sections - Specification: Kenya StandardPEng. Tech. Alvince KoreroNo ratings yet
- Level 2 Repair: 7-1. Components On The Rear CaseDocument8 pagesLevel 2 Repair: 7-1. Components On The Rear CaseNguyễn Duy LinhNo ratings yet
- 23 Section I GW Glasses Window System and MirrorsDocument58 pages23 Section I GW Glasses Window System and Mirrorsamir8100No ratings yet
- 1.trijang Rinpoche Bio CompleteDocument265 pages1.trijang Rinpoche Bio CompleteDhamma_Storehouse100% (1)
- KGP HG-3Document2 pagesKGP HG-3Lau VillarrealNo ratings yet
- Optimizing The Coagulant Dose To Control Membrane Fouling in Combined Coagulation Ultrafiltration Systems For Textile Wastewater ReclamationDocument7 pagesOptimizing The Coagulant Dose To Control Membrane Fouling in Combined Coagulation Ultrafiltration Systems For Textile Wastewater ReclamationAngga SaputraNo ratings yet
- LESSON 1 Random-VariablesDocument29 pagesLESSON 1 Random-Variablesnica jane madrigalNo ratings yet
- XFGRRRDocument100 pagesXFGRRRAbchoNo ratings yet
- Module 2: Hematopoiesis I. General Principles of HematopoiesisDocument13 pagesModule 2: Hematopoiesis I. General Principles of HematopoiesisJane JapoleNo ratings yet
- Question 1Document72 pagesQuestion 1dominateqNo ratings yet
- Internship ReportDocument33 pagesInternship Reportstreamingmedia786No ratings yet
- Taller de Calor EstDocument2 pagesTaller de Calor EstDiegoMuñozNo ratings yet
- Copper Alloy UNS C23000: Sponsored LinksDocument2 pagesCopper Alloy UNS C23000: Sponsored LinksvinayNo ratings yet
- Reflective EssayDocument5 pagesReflective Essaybwood17No ratings yet
- Chem 136-LAB ADocument3 pagesChem 136-LAB Asidro12388% (8)
- Types of DisasterDocument22 pagesTypes of DisasterKirstin del CarmenNo ratings yet
- Quality Testing of Honey StandardsDocument33 pagesQuality Testing of Honey StandardsK. N RaoNo ratings yet
- Determination of Melting Point of An Organic CompoundDocument4 pagesDetermination of Melting Point of An Organic CompoundyteyetyeNo ratings yet
- Methods of preparation and properties of amines, alkyl cyanides, nitro compounds and aromatic nitro compoundsDocument22 pagesMethods of preparation and properties of amines, alkyl cyanides, nitro compounds and aromatic nitro compoundsVanshika JainNo ratings yet
- PublicLifeUrbanJustice Gehl 2016-1Document119 pagesPublicLifeUrbanJustice Gehl 2016-1bronsteijnNo ratings yet