You might also like
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- BmE 04Document81 pagesBmE 04Fidaa JaafrahNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioningعلي الساعديNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioninghaker linkisNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- A Practical Guide To Conductivity MeasurementDocument3 pagesA Practical Guide To Conductivity MeasurementDheeraj YadavNo ratings yet
- Nonlinear Electronics 1: Nonlinear Dipoles, Harmonic Oscillators and Switching CircuitsFrom EverandNonlinear Electronics 1: Nonlinear Dipoles, Harmonic Oscillators and Switching CircuitsNo ratings yet
- Types of Sensors: ThermistorsDocument16 pagesTypes of Sensors: ThermistorsJinesh VinayachandranNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 2018 STAAR Gr5 Science TestDocument7 pages2018 STAAR Gr5 Science TestEngineerKhandaker Abid RahmanNo ratings yet
- Sensor interfacing techniquesDocument16 pagesSensor interfacing techniquesRaja VenkateshNo ratings yet
- Flow Measurement Techniques and ApplicationsDocument54 pagesFlow Measurement Techniques and ApplicationssourajpatelNo ratings yet
- EMT 4103 SENSORS AND TRANSDUCERS SPECIFICATIONSDocument31 pagesEMT 4103 SENSORS AND TRANSDUCERS SPECIFICATIONSSEAN WALLACENo ratings yet
- Instrumentation & Process ControlDocument27 pagesInstrumentation & Process ControlFarah Anjum100% (4)
- IE 3371:automatic Control Systems: Chapter 2:sensors and TransducersDocument54 pagesIE 3371:automatic Control Systems: Chapter 2:sensors and Transducersفيصل aNo ratings yet
- Control and MeasurementDocument16 pagesControl and MeasurementSandeep TanwarNo ratings yet
- Chapter 4-ppt - PDF/ InstrumentationDocument46 pagesChapter 4-ppt - PDF/ Instrumentationregassa rajiNo ratings yet
- Chapter 12Document23 pagesChapter 12nabilmalobaNo ratings yet
- Liquid Level Measuring DevicesDocument4 pagesLiquid Level Measuring DevicesAnia SzyszkaNo ratings yet
- Sensor & Iot - Unit 2Document29 pagesSensor & Iot - Unit 2Biswa RocksNo ratings yet
- Sensors-transducers overviewDocument113 pagesSensors-transducers overviewMuhammad Saeed Anwer100% (1)
- S&i 1Document9 pagesS&i 1Adi KhardeNo ratings yet
- Different Types of Sensors ExplainedDocument14 pagesDifferent Types of Sensors ExplainedTrency FernandesNo ratings yet
- A11.Level MeasurementDocument27 pagesA11.Level MeasurementSiddabathula MaheshNo ratings yet
- Unit - 2: Sensors and TransducersDocument66 pagesUnit - 2: Sensors and TransducersAkhil VarmaNo ratings yet
- 3 - Sensor and ActuatorsDocument31 pages3 - Sensor and Actuatorsmehulprajapati1661No ratings yet
- MotorDocument10 pagesMotorbhasker pandeyNo ratings yet
- Loat Transducer: Presented by Bilal Sarfraz Suffian Butt Hafiz AamirDocument18 pagesLoat Transducer: Presented by Bilal Sarfraz Suffian Butt Hafiz Aamirbilal sarfrazNo ratings yet
- DAQ Lec3Document30 pagesDAQ Lec3AbdelRahman MahmoudNo ratings yet
- Sensors and Transducers Overview by Dr. Tarek A. TutunjiDocument77 pagesSensors and Transducers Overview by Dr. Tarek A. TutunjiVarunNo ratings yet
- Sensor Technology: Types, Working & ApplicationsDocument21 pagesSensor Technology: Types, Working & ApplicationsVISHAL MUKUNDANNo ratings yet
- Biomedical Sensors PDFDocument14 pagesBiomedical Sensors PDFBMT0% (1)
- BEEE-Unit VI TransducerDocument71 pagesBEEE-Unit VI TransducerAisha JainNo ratings yet
- Pressure Measuring Instruments: Dr. Fahad Rehman CUI, Lahore CampusDocument69 pagesPressure Measuring Instruments: Dr. Fahad Rehman CUI, Lahore CampusAhmed Mustafa100% (1)
- Instruments Training & Calibration PDFDocument95 pagesInstruments Training & Calibration PDFSreedhar PayyavulaNo ratings yet
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- Working Principle: STC 2P050 Series Sloenoid ValvleDocument3 pagesWorking Principle: STC 2P050 Series Sloenoid ValvleSteve ClarNo ratings yet
- TransducerDocument42 pagesTransducerShreyash SargarNo ratings yet
- 2 TransducersDocument21 pages2 TransducersagabuskasepaNo ratings yet
- Water Level IndicatorDocument11 pagesWater Level Indicatorpooja choudharyNo ratings yet
- Mainly Instruments For Measurement and ControlDocument17 pagesMainly Instruments For Measurement and ControlbeselamuNo ratings yet
- Basics Mud Logging SensorsDocument24 pagesBasics Mud Logging Sensorsmohamed abd elsabour100% (4)
- ch2 - 3 Sensors and Transducers PDFDocument21 pagesch2 - 3 Sensors and Transducers PDFDeepakSinghNo ratings yet
- Electromagnetic Flow Meter Catalogue LJP (4310) PDFDocument14 pagesElectromagnetic Flow Meter Catalogue LJP (4310) PDFluis palacioNo ratings yet
- Level Measurement Fundamentals and TypesDocument21 pagesLevel Measurement Fundamentals and TypesJohn Francis EchonNo ratings yet
- SA QB Solved Unit 1-2Document26 pagesSA QB Solved Unit 1-2Kundan PednekarNo ratings yet
- Level Senso SsDocument15 pagesLevel Senso SsMaiud Abdalate OtmanNo ratings yet
- Level Measurement DevicesDocument23 pagesLevel Measurement DevicesRahul JaiswalNo ratings yet
- physics of sensors 23-24 - Students CopyDocument63 pagesphysics of sensors 23-24 - Students Copyommayekar19No ratings yet
- Level Switches 34Document25 pagesLevel Switches 34Hashem AliNo ratings yet
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocument81 pagesBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNo ratings yet
- Modern Industrial Electronics Project Input Devices GuideDocument41 pagesModern Industrial Electronics Project Input Devices GuideAini Syakimah ShuyutiNo ratings yet
- Instrumentation and P&ID - QuestionDocument6 pagesInstrumentation and P&ID - QuestionSharath KotaNo ratings yet
- Level Measurement (Vessels)Document22 pagesLevel Measurement (Vessels)Marius IleniNo ratings yet
- Basic InstrumentaionDocument17 pagesBasic InstrumentaionjhjhNo ratings yet
- Modern Industrial InstrumentationDocument5 pagesModern Industrial InstrumentationAmmy kNo ratings yet
- Pressure & Temperature Gause NotesDocument9 pagesPressure & Temperature Gause NotesNazimNo ratings yet
- Sensors IA2Document7 pagesSensors IA2Pavan MNo ratings yet
- Spontaneity: Decrease in The Enthalpy A Criterion For Spontaneity ?Document11 pagesSpontaneity: Decrease in The Enthalpy A Criterion For Spontaneity ?Prakhar GuptaNo ratings yet
- Code Case 2304-2 - Alloy Uns35045Document2 pagesCode Case 2304-2 - Alloy Uns35045uvarajmecheriNo ratings yet
- A Project Report On DESIGN OF HYDRAULIC JACKDocument3 pagesA Project Report On DESIGN OF HYDRAULIC JACKKirubel MogesNo ratings yet
- 0332 v11 T6Document38 pages0332 v11 T6sumitNo ratings yet
- Thermodynamics 2 Module #2 Ideal and Actual Reheat Rankine CycleDocument25 pagesThermodynamics 2 Module #2 Ideal and Actual Reheat Rankine CycleJohn Rexel CaroNo ratings yet
- Gravitation NotesDocument3 pagesGravitation NotesrajeshdraneNo ratings yet
- Oxygen CylinderDocument16 pagesOxygen Cylinderamanuel walelu100% (2)
- Jabiru / VW Propeller Hub DimensionsDocument1 pageJabiru / VW Propeller Hub Dimensionssnappish1No ratings yet
- Engineering Cookbook A Handbook For The Mechanical DesignerDocument107 pagesEngineering Cookbook A Handbook For The Mechanical Designerzulmodanggu100% (1)
- Vickers v10 v20 v2010 v2020 Vane PumpsDocument24 pagesVickers v10 v20 v2010 v2020 Vane PumpsjuangipiNo ratings yet
- 17.1 17.3 Oscillations SHM and EnergyDocument26 pages17.1 17.3 Oscillations SHM and EnergyTruly SkunkedNo ratings yet
- Automatic TransmissionDocument14 pagesAutomatic TransmissionRajanikantJadhav100% (4)
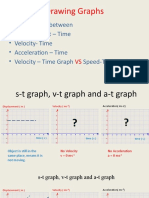
- Kinametic GraphsDocument11 pagesKinametic GraphsSec 3 EDUNo ratings yet
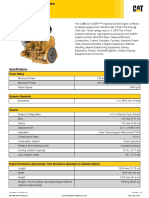
- Cat Engine c32Document5 pagesCat Engine c32wuub wuugfgNo ratings yet
- Technical Service Information: Chrysler 45Rfe/55RfeDocument3 pagesTechnical Service Information: Chrysler 45Rfe/55RfeMario MastronardiNo ratings yet
- Fordson Major ManualDocument47 pagesFordson Major ManualHassan GDOURANo ratings yet
- Iit Lec 2021 - PH101 - Lecture01Document21 pagesIit Lec 2021 - PH101 - Lecture01Vivek ParleyNo ratings yet
- R RA AD Diia AT TO OR RS SDocument4 pagesR RA AD Diia AT TO OR RS Slovac1No ratings yet
- 6180J PDFDocument620 pages6180J PDFCarlos Eduardo100% (1)
- Box Culvert 5cells - 4m X 4mDocument40 pagesBox Culvert 5cells - 4m X 4mshashiNo ratings yet
- Permen Esdm 7Document8 pagesPermen Esdm 7DangolNo ratings yet
- Literature Plug Valve Catalog PDFDocument2 pagesLiterature Plug Valve Catalog PDFAnonymous QjDNjgSvNo ratings yet
- ... Ratchetting and Ratchetting Boundary Study of Pressurized Straight Low Carbon Steel PipeDocument11 pages... Ratchetting and Ratchetting Boundary Study of Pressurized Straight Low Carbon Steel PipeAmir mahmoudi motlaghNo ratings yet
- How to use Crankbrothers Gem PumpsDocument2 pagesHow to use Crankbrothers Gem PumpsRoberto BrunoNo ratings yet
- SYNERGY - Profile (Electricals)Document9 pagesSYNERGY - Profile (Electricals)kuraimundNo ratings yet
- Comparison of ASME B31.1 and B31.3 piping codesDocument4 pagesComparison of ASME B31.1 and B31.3 piping codesPranpath Narupantawart100% (1)
- Annex 7 Maintenance Program - SFGLD A 1500 RPMDocument9 pagesAnnex 7 Maintenance Program - SFGLD A 1500 RPMMihir PrajapatiNo ratings yet
- 07we Bond Worked Example Anchored Sheet Pile WallDocument12 pages07we Bond Worked Example Anchored Sheet Pile WallPacoNo ratings yet
- Tabcalcs.com general equations sheetDocument2 pagesTabcalcs.com general equations sheetRamadan RashadNo ratings yet
- Tutorial - 1 Section ClassificationDocument15 pagesTutorial - 1 Section Classification木辛耳总No ratings yet