You might also like
- Rewinding 3 PhaseDocument29 pagesRewinding 3 PhaseFarhan Afzal80% (5)
- Staad - Pro Connect EditionDocument15 pagesStaad - Pro Connect EditionErShie Clemente100% (1)
- Lesson 11 - Laplace Transform and Its ApplicationsDocument36 pagesLesson 11 - Laplace Transform and Its ApplicationsSalman RezaNo ratings yet
- MIT18 04S18 1802reviewDocument10 pagesMIT18 04S18 1802reviewDanielNo ratings yet
- CalculusDocument35 pagesCalculusClaire Bianca DayananNo ratings yet
- The Calculation of Some Function LimitsDocument5 pagesThe Calculation of Some Function LimitsSebastian De BortoliNo ratings yet
- Lecture 01 - Review of FundamentalsDocument6 pagesLecture 01 - Review of FundamentalsCaden LeeNo ratings yet
- Multivariate Chain-RuleDocument3 pagesMultivariate Chain-Ruleneilli1992No ratings yet
- Vector Calculus NotesDocument3 pagesVector Calculus NotesChamil GomesNo ratings yet
- Analysis Total Found AnserDocument10 pagesAnalysis Total Found Anserrajendhar VarmaNo ratings yet
- Intermediate Calculus Study Sheet (MATH 262)Document0 pagesIntermediate Calculus Study Sheet (MATH 262)Marie-eve BastienNo ratings yet
- Linear Algebra Unit 2Document61 pagesLinear Algebra Unit 2Scout opNo ratings yet
- LO1 Math: Abdulrahman Adel Ahmed Abdulrahman Omar Kamel Mohab Ahmed HarfoushDocument37 pagesLO1 Math: Abdulrahman Adel Ahmed Abdulrahman Omar Kamel Mohab Ahmed Harfoushmohab harfoushNo ratings yet
- Lecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeDocument6 pagesLecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeRaulNo ratings yet
- Backward Forward PropogationDocument19 pagesBackward Forward PropogationConrad WaluddeNo ratings yet
- Natural Language Processing: I,, Solemnly Swear That I Was Not Up To No GoodDocument15 pagesNatural Language Processing: I,, Solemnly Swear That I Was Not Up To No GoodBindu K RNo ratings yet
- Series MITDocument19 pagesSeries MITCrismer Jinelly Figueroa VelezNo ratings yet
- CS 103X: Discrete Structures Homework Assignment 5 - SolutionsDocument3 pagesCS 103X: Discrete Structures Homework Assignment 5 - SolutionsMichel MagnaNo ratings yet
- Functions - by TrockersDocument53 pagesFunctions - by Trockerschimbo priestNo ratings yet
- Average Case Analysis of Quick SortDocument3 pagesAverage Case Analysis of Quick SortHitech GaNo ratings yet
- Average Case Analysis of Quick SortDocument3 pagesAverage Case Analysis of Quick SortJason David FrankNo ratings yet
- Average Case Analysis of Quick SortDocument3 pagesAverage Case Analysis of Quick SortJason David FrankNo ratings yet
- Average Case Analysis of Quick SortDocument3 pagesAverage Case Analysis of Quick SortJason David FrankNo ratings yet
- Plantilla Tarea ControlDocument9 pagesPlantilla Tarea ControlVi RSNo ratings yet
- Lecture 3 - Solving de With Laplace TransformsDocument6 pagesLecture 3 - Solving de With Laplace TransformsMark Joseph Panong100% (1)
- Quantum Field Theory Assignment 1Document4 pagesQuantum Field Theory Assignment 1Temmy SungNo ratings yet
- Lesson 12 - 13 PagesDocument7 pagesLesson 12 - 13 Pagesjonel rabongaNo ratings yet
- Rolle's Theorem:: Differential Calculus - One VariableDocument7 pagesRolle's Theorem:: Differential Calculus - One VariableAnshul ModiNo ratings yet
- LusinDocument6 pagesLusinM ShahbazNo ratings yet
- Lecture 2, Part 2: Backpropagation: Roger GrosseDocument9 pagesLecture 2, Part 2: Backpropagation: Roger GrosseDhaval PatelNo ratings yet
- Defazio NIPS2014Document15 pagesDefazio NIPS2014Montassar MhamdiNo ratings yet
- Noether TheoremDocument10 pagesNoether TheoremSatyaNo ratings yet
- Calculus 1: LimitsDocument6 pagesCalculus 1: LimitsAlie Lee GeolagaNo ratings yet
- Week 1-1Document61 pagesWeek 1-1DavisNo ratings yet
- Unit5 Differentiation FormulasDocument11 pagesUnit5 Differentiation FormulasDylan AngelesNo ratings yet
- Maths4ml MVC FormulaeDocument2 pagesMaths4ml MVC FormulaeMuhammad FaizanNo ratings yet
- Peskin QFT Solutions PDFDocument173 pagesPeskin QFT Solutions PDFShivam KumarNo ratings yet
- Introduction To Engineering AnalysisDocument8 pagesIntroduction To Engineering AnalysisSuprioNo ratings yet
- Exploration of The Quantum Casimir Effect: A. TorodeDocument7 pagesExploration of The Quantum Casimir Effect: A. Torodesayandatta1No ratings yet
- FractalOrderOfPrimes PDFDocument24 pagesFractalOrderOfPrimes PDFLeonardo BeSaNo ratings yet
- Lecture 16: Spatial Pattern Formation by Turing InstabilityDocument9 pagesLecture 16: Spatial Pattern Formation by Turing Instabilitynbd491No ratings yet
- Calculus 1 (Differential Calculus) Lecture Notes: Engr. Jason Anthony B. ConsultaDocument5 pagesCalculus 1 (Differential Calculus) Lecture Notes: Engr. Jason Anthony B. ConsultaJoe NasalitaNo ratings yet
- Lecture 13: Gaussian Process Optimization: 1.1 SubmodularityDocument13 pagesLecture 13: Gaussian Process Optimization: 1.1 Submodularitymtallis3142275No ratings yet
- Calculus I Chapter Two Lecture NoteDocument36 pagesCalculus I Chapter Two Lecture NoteKidist TaluNo ratings yet
- Lec 1Document4 pagesLec 1Vïshü ÇhøūdhãryNo ratings yet
- New Trigonometrically Method For Solving Non-Linear Transcendental EquationsDocument7 pagesNew Trigonometrically Method For Solving Non-Linear Transcendental EquationsIJRASETPublicationsNo ratings yet
- hw8 Solns PDFDocument7 pageshw8 Solns PDFDon QuixoteNo ratings yet
- Applicaton of Laplace TransformDocument10 pagesApplicaton of Laplace TransformJohn Reda100% (1)
- SlatteryWhitaker 2010ms28 PDFDocument8 pagesSlatteryWhitaker 2010ms28 PDFOscar A. LuévanoNo ratings yet
- Von Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationDocument8 pagesVon Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationAshish mishraNo ratings yet
- 8.indefinite IntegrationPROBLEM SOLVING TACTICSFormulae SheetDocument6 pages8.indefinite IntegrationPROBLEM SOLVING TACTICSFormulae Sheetyodel23957No ratings yet
- Grade 11 Basic Calculus: Quarter 3 - Week 5 ModuleDocument9 pagesGrade 11 Basic Calculus: Quarter 3 - Week 5 ModuleAngelo Ivan100% (1)
- Problem 1: 2.2.7: With (Detools) : With (Plots)Document14 pagesProblem 1: 2.2.7: With (Detools) : With (Plots)Romy RamadhanNo ratings yet
- VCT Imp QuestionsDocument6 pagesVCT Imp QuestionscringeNo ratings yet
- Key Tellg TellgDocument1 pageKey Tellg TellgssfofoNo ratings yet
- 6.1 Power Series and Functions, Mat 2280Document10 pages6.1 Power Series and Functions, Mat 2280Olivier UwamahoroNo ratings yet
- Oa 2Document12 pagesOa 2Severus NietzscheNo ratings yet
- Learning Material 1Document8 pagesLearning Material 1Akon MotumboNo ratings yet
- Math Project Activities 1Document6 pagesMath Project Activities 1api-696786602No ratings yet
- Pages From Notes09Document10 pagesPages From Notes09quasemanobrasNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Artificial Exam Scorer For Efficient Marking and Grading Ofsay TestsDocument99 pagesArtificial Exam Scorer For Efficient Marking and Grading Ofsay TestsEdikan AkpanNo ratings yet
- Car License Plate Recognition With Neural Networks and Fuzzy Log PDFDocument5 pagesCar License Plate Recognition With Neural Networks and Fuzzy Log PDFestherNo ratings yet
- Ieee Handwriting Recognition Using Deep Learning in Keras ICACCCN.2018.8748540Document4 pagesIeee Handwriting Recognition Using Deep Learning in Keras ICACCCN.2018.8748540Edikan AkpanNo ratings yet
- Ieee Vehicle-License-Plate Recognition Based On Neural Networks Icinfa.2011.5949018Document4 pagesIeee Vehicle-License-Plate Recognition Based On Neural Networks Icinfa.2011.5949018Edikan AkpanNo ratings yet
- Ieee Neural Network Based Vehicle Number Plate Recognition System Icpedc47771.2019.9036497Document3 pagesIeee Neural Network Based Vehicle Number Plate Recognition System Icpedc47771.2019.9036497Edikan AkpanNo ratings yet
- Ieee AUTOMATIC NUMBER-PLATE RECOGNITION VNIS.1994.396858-NEURAL NETWORK APPROACHDocument3 pagesIeee AUTOMATIC NUMBER-PLATE RECOGNITION VNIS.1994.396858-NEURAL NETWORK APPROACHEdikan AkpanNo ratings yet
- Ieee An Artificial Neural Network Approach To Hand-Writing Recognition Kes.1997.616872Document5 pagesIeee An Artificial Neural Network Approach To Hand-Writing Recognition Kes.1997.616872Edikan AkpanNo ratings yet
- How Oleds Work: by Craig Freudenrich, PH.DDocument13 pagesHow Oleds Work: by Craig Freudenrich, PH.DEdikan AkpanNo ratings yet
- Ieee Programmable Dataflow Accelerators A 5G OFDM ModulationDemodulation Case Study Icassp40776.2020.9053796Document5 pagesIeee Programmable Dataflow Accelerators A 5G OFDM ModulationDemodulation Case Study Icassp40776.2020.9053796Edikan AkpanNo ratings yet
- Ieee Iterative Reduction of Out-of-Band Power and Peak-to-Average Power Ratio For Non-Contiguous OFDM Systems Based On POCS IEICE - ITERATIVEDocument11 pagesIeee Iterative Reduction of Out-of-Band Power and Peak-to-Average Power Ratio For Non-Contiguous OFDM Systems Based On POCS IEICE - ITERATIVEEdikan AkpanNo ratings yet
- Ieee An Efficient Implementation of NC-OFDM Transceivers For Cognitive Crowncom.2006.363452Document5 pagesIeee An Efficient Implementation of NC-OFDM Transceivers For Cognitive Crowncom.2006.363452Edikan AkpanNo ratings yet
- ZZ? ??/?? ???P?c222/Z: Filed April 20, 1945Document5 pagesZZ? ??/?? ???P?c222/Z: Filed April 20, 1945Edikan AkpanNo ratings yet
- Ieee An Efficient Pruning Algorithm For IFFTFFT Based On NC-OFDM in 5G Icicct.2018.8473035Document4 pagesIeee An Efficient Pruning Algorithm For IFFTFFT Based On NC-OFDM in 5G Icicct.2018.8473035Edikan AkpanNo ratings yet
- En CD00003794 PDFDocument6 pagesEn CD00003794 PDFOpena JcNo ratings yet
- SR-33s N: 2-Az726&áeza%rerDocument10 pagesSR-33s N: 2-Az726&áeza%rerEdikan AkpanNo ratings yet
- Frequency and Phase Modulation: Sharlene Katz James FlynnDocument21 pagesFrequency and Phase Modulation: Sharlene Katz James FlynnSakhawat Hossain RonyNo ratings yet
- Introduction To Artificial Intelligence - Neural Networks-1Document14 pagesIntroduction To Artificial Intelligence - Neural Networks-1Edikan AkpanNo ratings yet
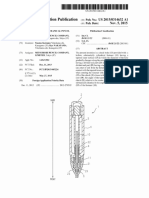
- Patent Application Publication (10) Pub. No.: US 2015/0314.632 A1Document15 pagesPatent Application Publication (10) Pub. No.: US 2015/0314.632 A1Edikan AkpanNo ratings yet
- Funcionamento T CONDocument49 pagesFuncionamento T CONHilfeTech Informatica100% (1)
- Introduction To Microfabrication: PHYS 534 (Fall 2008)Document34 pagesIntroduction To Microfabrication: PHYS 534 (Fall 2008)LydiaNo ratings yet
- Angle ModDocument56 pagesAngle ModAllanki Sanyasi RaoNo ratings yet
- DBI SPSS User Manual 2Document283 pagesDBI SPSS User Manual 2Edikan AkpanNo ratings yet
- US5044805Document6 pagesUS5044805Edikan AkpanNo ratings yet
- Voltage RegulatorDocument6 pagesVoltage RegulatorhanishbhatiNo ratings yet
- Electromagnetic Wave Propagation - Ground, Sky, Space Wave, ExamplesDocument9 pagesElectromagnetic Wave Propagation - Ground, Sky, Space Wave, ExamplesEdikan AkpanNo ratings yet
- Perceptions of Structural Injustice and Efficacy - Participation in Low Moderate High-Cost Forms of Collective ActionDocument33 pagesPerceptions of Structural Injustice and Efficacy - Participation in Low Moderate High-Cost Forms of Collective ActionEdikan AkpanNo ratings yet
- EE2010Notes+Tutorials of PartI (For EEE Club)Document118 pagesEE2010Notes+Tutorials of PartI (For EEE Club)Leonard TanotoNo ratings yet
- Horse Racing Kelly CriterionDocument9 pagesHorse Racing Kelly CriteriondatsnoNo ratings yet
- Credit Card Fraud DetectDocument19 pagesCredit Card Fraud DetectVikas BankarNo ratings yet
- Top 10 SQL QueriesDocument39 pagesTop 10 SQL Queriesgdb5cfskgvNo ratings yet
- Ann PMDocument1 pageAnn PMfaizanNo ratings yet
- JCT M16 FE Notes LentDocument47 pagesJCT M16 FE Notes LentAnonymous Bdt0OGhNo ratings yet
- Ss PaperDocument8 pagesSs PaperbharadwajNo ratings yet
- AE4-Activity 3B Minimization of Cost - Simplex MethodDocument3 pagesAE4-Activity 3B Minimization of Cost - Simplex MethodMarco RegunayanNo ratings yet
- LBDLDocument142 pagesLBDLzardu layakNo ratings yet
- Deep Learning Algorithm For Stock Price Prediction: 1. AbstractDocument5 pagesDeep Learning Algorithm For Stock Price Prediction: 1. AbstractAmit SheoranNo ratings yet
- Iteration, Algebra Revision Notes From A-Level Maths TutorDocument5 pagesIteration, Algebra Revision Notes From A-Level Maths TutorA-level Maths TutorNo ratings yet
- Basic Concepts Terminology and Techniques For Process ControlDocument9 pagesBasic Concepts Terminology and Techniques For Process ControlPaula Daniela Andrade SànchezNo ratings yet
- Quantization and Sampling Using MatlabDocument3 pagesQuantization and Sampling Using MatlabAbdullah SalemNo ratings yet
- DSM Assignment#3 (Module#4) .PDFDocument2 pagesDSM Assignment#3 (Module#4) .PDFUmarShahrozNo ratings yet
- Diagrama de Flujo - GA6-240202501 - AA1-EV02Document6 pagesDiagrama de Flujo - GA6-240202501 - AA1-EV02Vanessa SanchezNo ratings yet
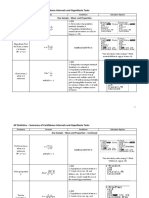
- AP Statistics - Summary of Confidence Intervals and Hypothesis TestsDocument5 pagesAP Statistics - Summary of Confidence Intervals and Hypothesis TestsThảo VânNo ratings yet
- M.Tech - CDS - IISc Course Plan 2019Document13 pagesM.Tech - CDS - IISc Course Plan 2019ajithNo ratings yet
- S S S 3 Fur Maths 2ND Term E-Note 2017Document31 pagesS S S 3 Fur Maths 2ND Term E-Note 2017Gabriel OnalekeNo ratings yet
- On Disk Format Luks2Document16 pagesOn Disk Format Luks2benjohnsonnnn6891No ratings yet
- School of Electrical Engineering and Computing Department of Electronics and CommunicationDocument12 pagesSchool of Electrical Engineering and Computing Department of Electronics and CommunicationKeneni AlemayehuNo ratings yet
- Midterm Probset RelationsDocument2 pagesMidterm Probset RelationsJericho QuitilNo ratings yet
- A Few Notes On Finite Element MethodDocument3 pagesA Few Notes On Finite Element MethodSnehasish BhattacharjeeNo ratings yet
- Weld Defect Extraction and ClassificationDocument8 pagesWeld Defect Extraction and ClassificationzsmithNo ratings yet
- Answer All.: Economics 206 Mathematical Economics Midterm ExaminationDocument2 pagesAnswer All.: Economics 206 Mathematical Economics Midterm ExaminationSheila MontalbaNo ratings yet
- The German eID-Card by Jens BenderDocument42 pagesThe German eID-Card by Jens BenderPoomjit SirawongprasertNo ratings yet
- DSA Prelim PaperDocument1 pageDSA Prelim Papervinayakteli100No ratings yet
- Sample 1Document20 pagesSample 1davNo ratings yet
- Heart Disease rp2Document14 pagesHeart Disease rp2EkanshNo ratings yet