You might also like
- Design and Flow Coefficient Analysis of Globe Valve As Control Valve Using MATLABDocument5 pagesDesign and Flow Coefficient Analysis of Globe Valve As Control Valve Using MATLABInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Numerical simulation of cavitating flow through ball check valveDocument11 pagesNumerical simulation of cavitating flow through ball check valvepohanisirNo ratings yet
- NEW CV SizingDocument23 pagesNEW CV SizinglavchemicalNo ratings yet
- A Review On CFD Analysis of Control Valves: GRD Journal For Engineering - Volume 3 - Issue 7 - June 2018 ISSN: 2455-5703Document4 pagesA Review On CFD Analysis of Control Valves: GRD Journal For Engineering - Volume 3 - Issue 7 - June 2018 ISSN: 2455-5703MEER MUSTAFA ALINo ratings yet
- Control ValveDocument25 pagesControl ValveAsad RazaNo ratings yet
- Butterfly Valve and FlowDocument5 pagesButterfly Valve and FlowMurugan RangarajanNo ratings yet
- Control Valve & Actuator Sizing27012004173744Document23 pagesControl Valve & Actuator Sizing27012004173744Raju NaiduNo ratings yet
- Section 6. Final Control ElementDocument23 pagesSection 6. Final Control ElementakramhomriNo ratings yet
- Selection, Sizing, and Operation of Control Valves For Gases and LiquidsDocument7 pagesSelection, Sizing, and Operation of Control Valves For Gases and LiquidsAshish ShahNo ratings yet
- Experiments and Simulation On A Pulse Dampener System For Stabilizing Liquid FlowDocument7 pagesExperiments and Simulation On A Pulse Dampener System For Stabilizing Liquid FlowFrancesca CoattiNo ratings yet
- EXPERIMENTAL STUDYDocument6 pagesEXPERIMENTAL STUDYSoumya MallikarjunNo ratings yet
- CFD Ball ValveDocument8 pagesCFD Ball ValveKelvin Octavianus DjohanNo ratings yet
- bOLETIN VALVULAS SWAGELOK PDFDocument12 pagesbOLETIN VALVULAS SWAGELOK PDFexergicNo ratings yet
- Valve Sizing: Technical BulletinDocument12 pagesValve Sizing: Technical Bulletinherysyam1980No ratings yet
- Valve Sizing: Technical BulletinDocument12 pagesValve Sizing: Technical Bulletinpritesh29108068No ratings yet
- Numerical Modeling For Simulation Transient Flow in Distribution System With Crank-Nicolson MethodDocument9 pagesNumerical Modeling For Simulation Transient Flow in Distribution System With Crank-Nicolson MethodInternational Journal of Structronics & MechatronicsNo ratings yet
- Prediction of Flow Coefficient and Hydrodynamic Torque Coefficient in Butterfly ValveDocument5 pagesPrediction of Flow Coefficient and Hydrodynamic Torque Coefficient in Butterfly ValveRajeshNo ratings yet
- Lab Session 03 UptadeDocument7 pagesLab Session 03 UptadeAbdullah SahirNo ratings yet
- Valve Sizing CalculationsDocument20 pagesValve Sizing Calculationsask_friend100% (3)
- DesignRules For HighDampingDocument8 pagesDesignRules For HighDampingRajesh MalikNo ratings yet
- Wendym,+01 Daniel GutierrezDocument26 pagesWendym,+01 Daniel GutierrezBreno PenaNo ratings yet
- Control Valve Question and Answer - 2Document13 pagesControl Valve Question and Answer - 2TATA STEELNo ratings yet
- Passive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturiDocument5 pagesPassive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturilavanyaNo ratings yet
- Designand Modelingof Ball Valve Final VersionDocument27 pagesDesignand Modelingof Ball Valve Final VersionBreno PenaNo ratings yet
- Size Control Valves For Lab-Scale Laminar Flow: Fluids and Solids HandlingDocument5 pagesSize Control Valves For Lab-Scale Laminar Flow: Fluids and Solids HandlingNattapong PongbootNo ratings yet
- Size Control Valves For Lab-Scale Laminar Flow: Fluids and Solids HandlingDocument5 pagesSize Control Valves For Lab-Scale Laminar Flow: Fluids and Solids HandlingNattapong PongbootNo ratings yet
- Flow MeasurementDocument10 pagesFlow Measurementiroshauk67% (3)
- Characteristics of Control ValveDocument9 pagesCharacteristics of Control ValvecomodusNo ratings yet
- Corse ProjectDocument21 pagesCorse ProjectsydbwlanNo ratings yet
- Mass Flow Rate Measurement of Gas/Liquid Two-Phase Flow in Horizontal Pipe Based On V-Cone Flow Meter and Adaptive Wavelet NetworkDocument6 pagesMass Flow Rate Measurement of Gas/Liquid Two-Phase Flow in Horizontal Pipe Based On V-Cone Flow Meter and Adaptive Wavelet NetworkFernando GuerreroNo ratings yet
- Ijet V3i6p84Document6 pagesIjet V3i6p84International Journal of Engineering and TechniquesNo ratings yet
- Flow Analysis of Butterfly Valve Using CFDDocument7 pagesFlow Analysis of Butterfly Valve Using CFDIJMERNo ratings yet
- 3-Control-Valve-SizingDocument16 pages3-Control-Valve-Sizingbaiju2pNo ratings yet
- Unsteady-State and Pseudosteady-State FlowDocument17 pagesUnsteady-State and Pseudosteady-State FlowBintang SampurnaNo ratings yet
- Applied Thermal Engineering: Kathleen de Kerpel, Sven de Schampheleire, Timothy de Keulenaer, Michel de PaepeDocument15 pagesApplied Thermal Engineering: Kathleen de Kerpel, Sven de Schampheleire, Timothy de Keulenaer, Michel de PaepexabiNo ratings yet
- 7 - Control Valve CharacteristicsDocument11 pages7 - Control Valve CharacteristicsAhmed ShahabiNo ratings yet
- Flow Analysis of Butterfly Valve Using CFD: JournalDocument7 pagesFlow Analysis of Butterfly Valve Using CFD: JournalMary Grace VelitarioNo ratings yet
- Fundamentals of Final Control ElementsDocument57 pagesFundamentals of Final Control ElementshazemNo ratings yet
- Estimation The Volume Flow Rate Using Venturi-Meter Apparatus (Fluid Exp 6)Document10 pagesEstimation The Volume Flow Rate Using Venturi-Meter Apparatus (Fluid Exp 6)hayder alaliNo ratings yet
- Chapter Four Flow Measurement and ControlDocument35 pagesChapter Four Flow Measurement and ControlMoqeemNo ratings yet
- Major-Project-II ReportDocument22 pagesMajor-Project-II ReportPrerit RaiNo ratings yet
- A Novel Method of Using A Control Valve For Measurement and Control of Flow - Instrumentation and Measurement, IEEE Transactions OnDocument3 pagesA Novel Method of Using A Control Valve For Measurement and Control of Flow - Instrumentation and Measurement, IEEE Transactions OnBhuvanaNo ratings yet
- Concepts: Infinite Acting and Boundary Dominated FlowDocument31 pagesConcepts: Infinite Acting and Boundary Dominated Flowhorns2034No ratings yet
- Volume (10) Issue (2) 160-173Document14 pagesVolume (10) Issue (2) 160-173abhisek haldarNo ratings yet
- An Intelligent Flow Measurement Technique Using Orifice: Santhosh K. V. and B. K. RoyDocument4 pagesAn Intelligent Flow Measurement Technique Using Orifice: Santhosh K. V. and B. K. RoyZulfitrizulkarnain ZulkarnainNo ratings yet
- Fluid FlowDocument15 pagesFluid FlowRahul TaleNo ratings yet
- Fluid FlowDocument15 pagesFluid Flowdekra abdoNo ratings yet
- Reknik Reservoir 2Document6 pagesReknik Reservoir 2Delvia LebangNo ratings yet
- Laminar & Turbulent Flow in PipesDocument5 pagesLaminar & Turbulent Flow in PipesDhananjay KadamNo ratings yet
- Non-Turbulent Perfect Compressible Barotropic: Bernoulli EquationDocument12 pagesNon-Turbulent Perfect Compressible Barotropic: Bernoulli Equationcristina.sorana.ionescu6397No ratings yet
- A Review On CFD Analysis of Control ValvesDocument4 pagesA Review On CFD Analysis of Control ValvesGRD JournalsNo ratings yet
- Effect of Release Coefficient on Water Flow SystemsDocument12 pagesEffect of Release Coefficient on Water Flow Systemschristian.canaleNo ratings yet
- Pressure Transient Formation and Well Testing: Convolution, Deconvolution and Nonlinear EstimationFrom EverandPressure Transient Formation and Well Testing: Convolution, Deconvolution and Nonlinear EstimationRating: 2 out of 5 stars2/5 (1)
- Study of Flow Performance of A Globe Valve and DesDocument8 pagesStudy of Flow Performance of A Globe Valve and DesJauhar FarrasyahNo ratings yet
- Valve GeometryDocument5 pagesValve GeometryPhạm PhátNo ratings yet
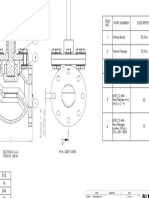
- Valve assembly parts list and drawingsDocument1 pageValve assembly parts list and drawingsPhạm PhátNo ratings yet
- Fluent K EpsilonDocument15 pagesFluent K EpsilonPhạm PhátNo ratings yet
- WOPU0815 Feat Singe ValveDocument8 pagesWOPU0815 Feat Singe ValvePhạm PhátNo ratings yet
- Valtek Channel StreamDocument12 pagesValtek Channel StreamPhạm PhátNo ratings yet
- Supcon Valve Brochure EnglishDocument12 pagesSupcon Valve Brochure EnglishPhạm PhátNo ratings yet
- Air Pot Conversion ChartDocument1 pageAir Pot Conversion ChartPhạm PhátNo ratings yet
- 2019 HSB IR Thermography Sample ReportDocument17 pages2019 HSB IR Thermography Sample Reportedward dennis salvador quintoNo ratings yet
- On Tap Cuoi Ki AV4 - 5.2021Document6 pagesOn Tap Cuoi Ki AV4 - 5.2021Phạm PhátNo ratings yet
- Surviving and Thriving in The Fourth Industrial ReDocument10 pagesSurviving and Thriving in The Fourth Industrial RePhạm PhátNo ratings yet
- NDT On CompositesDocument33 pagesNDT On CompositesSteven J. Selcuk100% (2)
- Báo cáo tuần 8Document3 pagesBáo cáo tuần 8Phạm PhátNo ratings yet
- Aeronautical Knowledge 3 (Instruments)Document68 pagesAeronautical Knowledge 3 (Instruments)Phạm PhátNo ratings yet
- Remotesensing 13 01204Document25 pagesRemotesensing 13 01204Phạm PhátNo ratings yet
- A318 - A319 - A320 - A321 - NTM - 01-Aug-2021 - 57-29-12-240-801-A01 - Inspection of Main Landing GeDocument3 pagesA318 - A319 - A320 - A321 - NTM - 01-Aug-2021 - 57-29-12-240-801-A01 - Inspection of Main Landing GePhạm PhátNo ratings yet
- MAGALIES GLIDING CLUB SOP AIRSPACEDocument2 pagesMAGALIES GLIDING CLUB SOP AIRSPACEPhạm PhátNo ratings yet
- Dede - (2010) - Comparing Frameworks For 21st Century Skills PDFDocument16 pagesDede - (2010) - Comparing Frameworks For 21st Century Skills PDFNaing Lynn HtunNo ratings yet
- Problemas OrdinarioDocument10 pagesProblemas OrdinarioAngelo EdoraNo ratings yet
- Surviving and Thriving in The Fourth Industrial ReDocument10 pagesSurviving and Thriving in The Fourth Industrial RePhạm PhátNo ratings yet
- Actuators 10 00048 v2Document29 pagesActuators 10 00048 v2Phạm PhátNo ratings yet
- Combo X6 enDocument1 pageCombo X6 enPhạm PhátNo ratings yet
- Voo GT 12 TeachingDocument23 pagesVoo GT 12 TeachingPhạm PhátNo ratings yet
- A2 - Evolution of 21st Century Skills FrameworkDocument16 pagesA2 - Evolution of 21st Century Skills FrameworkPhạm PhátNo ratings yet
- Hexacopter With Gripping Module: Mechatronic Engineering, 180 CreditsDocument56 pagesHexacopter With Gripping Module: Mechatronic Engineering, 180 CreditsPhạm PhátNo ratings yet
- A C Engines and Jet Propulsion3Document152 pagesA C Engines and Jet Propulsion3Mukesh Kumar100% (1)
- Combo X6 enDocument1 pageCombo X6 enPhạm PhátNo ratings yet
- 21st Century Skills Literature Review Examines Impact on OutcomesDocument50 pages21st Century Skills Literature Review Examines Impact on OutcomesViveka AshokNo ratings yet
- CFD Prediction of Low-Re Airfoil PerformanceDocument98 pagesCFD Prediction of Low-Re Airfoil PerformancePhạm PhátNo ratings yet
- 2010 Commencement ProgramDocument73 pages2010 Commencement Programpearldrop1No ratings yet
- New Microsoft Office Word DocumentDocument40 pagesNew Microsoft Office Word Documentసురేంద్ర కారంపూడిNo ratings yet
- You Have The Mark of The Beast Not Forwarding This To Nine People So Saith The Lord Your GodDocument70 pagesYou Have The Mark of The Beast Not Forwarding This To Nine People So Saith The Lord Your GodGo Og100% (1)
- CSEC Physics P2 2013 JanuaryDocument22 pagesCSEC Physics P2 2013 JanuaryBill BobNo ratings yet
- # 1. Neet 2017 - Physics - Chapter 11 Kinetic TheoryDocument19 pages# 1. Neet 2017 - Physics - Chapter 11 Kinetic TheoryTamilaruviNo ratings yet
- At T T A at at at T T K A: The Theory of Interest - Solutions ManualDocument158 pagesAt T T A at at at T T K A: The Theory of Interest - Solutions Manual迷悟100% (2)
- Chiziqli Operatorlar Va Ularning Xossalari: "Science and Education" Scientific Journal August 2021 / Volume 2 Issue 8Document13 pagesChiziqli Operatorlar Va Ularning Xossalari: "Science and Education" Scientific Journal August 2021 / Volume 2 Issue 8nilufarutebaeva0No ratings yet
- Best 200+ Latest Technical Seminar Topics For Engineering StudentsDocument13 pagesBest 200+ Latest Technical Seminar Topics For Engineering Studentsjijochristo123100% (1)
- Electric Field Formula QuestionsDocument3 pagesElectric Field Formula QuestionsSansen Diamante Colipano Jr.No ratings yet
- DNV 05Document166 pagesDNV 05Suntoyo Saja100% (1)
- Particle On A RingDocument9 pagesParticle On A RingSurendra KarwaNo ratings yet
- Chap2 Mason RuleDocument4 pagesChap2 Mason Rulegoroi90No ratings yet
- Cours Mansoor YoussefiDocument95 pagesCours Mansoor Youssefiziyad benkhadajNo ratings yet
- Problem Solving WorksheetDocument7 pagesProblem Solving WorksheetJSH100No ratings yet
- Types of Computer Monitors ExplainedDocument6 pagesTypes of Computer Monitors ExplainedKhan IhsanNo ratings yet
- Mechanics Practice Problems 7Document24 pagesMechanics Practice Problems 7Nguyễn Trần Minh TríNo ratings yet
- Fujitsu General Ash7asc-W - 9710k1222Document16 pagesFujitsu General Ash7asc-W - 9710k1222Liuda Scutaru Zarisneac100% (2)
- 2.1.2.a Beamdeflection 2Document7 pages2.1.2.a Beamdeflection 2Bailey RodriguezNo ratings yet
- Alloys and PropertiesDocument8 pagesAlloys and PropertiesAna RivasNo ratings yet
- ION-BOILER TECHNICAL PASSPORTDocument15 pagesION-BOILER TECHNICAL PASSPORTElectroventica ElectroventicaNo ratings yet
- ABB Softstarters2Document200 pagesABB Softstarters2mhofuNo ratings yet
- ElectromagnetismDocument12 pagesElectromagnetismDavid ParfittNo ratings yet
- Calculating Average Speed and Density from Time and Distance DataDocument32 pagesCalculating Average Speed and Density from Time and Distance DataLove TxTNo ratings yet
- EEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate SystemsDocument56 pagesEEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate Systems357911No ratings yet
- BSC Bioanalytical Technique AssignmentDocument14 pagesBSC Bioanalytical Technique AssignmentG GayathriBSC BTNo ratings yet
- The Complex Theory of Colour Harmony: Antal NemcsicsDocument9 pagesThe Complex Theory of Colour Harmony: Antal NemcsicsPeabyru PuitãNo ratings yet
- Experimental Investigation On Bituminous Mix Using Coconut CoirDocument8 pagesExperimental Investigation On Bituminous Mix Using Coconut CoirTJPRC PublicationsNo ratings yet
- Steel StructureDocument8 pagesSteel StructureﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞﱞNo ratings yet
- NASA Design and Analysis of Rotorcraft Theory Release 1.6Document190 pagesNASA Design and Analysis of Rotorcraft Theory Release 1.6Muralidharan Shanmugam100% (1)
- F Fatigue Analysis of A LUG Atigue Analysis of A LUG Assembly AssemblyDocument14 pagesF Fatigue Analysis of A LUG Atigue Analysis of A LUG Assembly Assemblyandry4jcNo ratings yet