You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 pagesLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ADocument17 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ASledge HammerNo ratings yet
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- Adjusting B-axis Zero Return PositionDocument4 pagesAdjusting B-axis Zero Return Positionmahdi elmayNo ratings yet
- Adjusting B-axis Zero Return PositionDocument4 pagesAdjusting B-axis Zero Return Positionmahdi elmayNo ratings yet
- Metrology CoordinateDocument24 pagesMetrology Coordinate김상동No ratings yet
- ALPHA 10/10P SERVICE MANUALDocument19 pagesALPHA 10/10P SERVICE MANUAL王宗超No ratings yet
- FANUC Series 16i 18i 21i-TBMB FANUC Series 16i18i21i-TBMB Safety Function at Opening Protection Door (Safe Spindle Stop Function)Document9 pagesFANUC Series 16i 18i 21i-TBMB FANUC Series 16i18i21i-TBMB Safety Function at Opening Protection Door (Safe Spindle Stop Function)mahdi elmay0% (1)
- Service Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return PositionDocument5 pagesService Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return Positionmahdi elmay100% (3)
- Service Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return PositionDocument5 pagesService Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return Positionmahdi elmay100% (3)
- Adjustment of Tool Clamp Detection SwitchDocument3 pagesAdjustment of Tool Clamp Detection Switchmahdi elmay100% (1)
- Adjustment of Tool Clamp Detection SwitchDocument3 pagesAdjustment of Tool Clamp Detection Switchmahdi elmay100% (1)
- FANUC Series 30i/31i/32i-MODEL A MAINTENANCE MANUAL Alteration of Section 5.14 and Appendix C.2.1Document22 pagesFANUC Series 30i/31i/32i-MODEL A MAINTENANCE MANUAL Alteration of Section 5.14 and Appendix C.2.1mahdi elmayNo ratings yet
- Service Manual: SV01-NHX40AT03-01E NHX4000 NHX5000 ATC Adjustment of Spindle Orientation PositionDocument1 pageService Manual: SV01-NHX40AT03-01E NHX4000 NHX5000 ATC Adjustment of Spindle Orientation Positionmahdi elmay100% (1)
- Service Manual: SV01-NHX40AT03-01E NHX4000 NHX5000 ATC Adjustment of Spindle Orientation PositionDocument1 pageService Manual: SV01-NHX40AT03-01E NHX4000 NHX5000 ATC Adjustment of Spindle Orientation Positionmahdi elmay100% (1)
- Service Manual: SV01-NHX40AX02-01E NHX4000 MSX-853 Axis Adjustment Procedure of Y-Axis Zero Return PositionDocument4 pagesService Manual: SV01-NHX40AX02-01E NHX4000 MSX-853 Axis Adjustment Procedure of Y-Axis Zero Return Positionmahdi elmayNo ratings yet
- Service Manual: SV01-NHX40AX02-01E NHX4000 MSX-853 Axis Adjustment Procedure of Y-Axis Zero Return PositionDocument4 pagesService Manual: SV01-NHX40AX02-01E NHX4000 MSX-853 Axis Adjustment Procedure of Y-Axis Zero Return Positionmahdi elmayNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Manuel de Maintenance TEREXDocument454 pagesManuel de Maintenance TEREXanon_964686176100% (1)
- XP 620Document8 pagesXP 620Far PilonNo ratings yet
- EDN Design Ideas 2007Document146 pagesEDN Design Ideas 2007chag1956100% (2)
- PMC Ladder Language Programming Manual PDFDocument1,023 pagesPMC Ladder Language Programming Manual PDFRodney HanesNo ratings yet
- Direct Input Offset Value 2-Spindle LatheDocument14 pagesDirect Input Offset Value 2-Spindle Lathemahdi elmayNo ratings yet
- d113 Ds d000351-009532Document58 pagesd113 Ds d000351-009532Rocky GreenNo ratings yet
- Service Manual: SV01-NHX40AX01-01E NHX4000 MSX-853 Axis Adjustment Procedure of X-Axis Zero Return PositionDocument5 pagesService Manual: SV01-NHX40AX01-01E NHX4000 MSX-853 Axis Adjustment Procedure of X-Axis Zero Return Positionmahdi elmayNo ratings yet
- Service Manual: SV01-NHX40AX01-01E NHX4000 MSX-853 Axis Adjustment Procedure of X-Axis Zero Return PositionDocument5 pagesService Manual: SV01-NHX40AX01-01E NHX4000 MSX-853 Axis Adjustment Procedure of X-Axis Zero Return Positionmahdi elmayNo ratings yet
- Viper 12s Buck Boost ConverterDocument14 pagesViper 12s Buck Boost ConverterelkillyNo ratings yet
- Fanuc 16i 18i 21i SRAM BackupDocument6 pagesFanuc 16i 18i 21i SRAM Backupmack144No ratings yet
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- FS16/18-MC/TC and FS16i/18i/21i-MA/TA external touch panel interface specificationsDocument7 pagesFS16/18-MC/TC and FS16i/18i/21i-MA/TA external touch panel interface specificationsmahdi elmayNo ratings yet
- FANUC Macro Interface ExpansionDocument10 pagesFANUC Macro Interface Expansionmahdi elmayNo ratings yet
- APM303Document20 pagesAPM303Goran Jovanovic100% (5)
- Moog-Valves-D671K D672K D673K D674K D675K-Manual-en PDFDocument290 pagesMoog-Valves-D671K D672K D673K D674K D675K-Manual-en PDFphankhoa83-1No ratings yet
- FANUC Series 16i 18i 21i-TATB Outputting Signal Near End PointDocument3 pagesFANUC Series 16i 18i 21i-TATB Outputting Signal Near End Pointmahdi elmayNo ratings yet
- WA CIWS Service ManualDocument137 pagesWA CIWS Service ManualGauri Calderon TrujilloNo ratings yet
- Operating Manual Bio Wave Generator 21 LCDDocument16 pagesOperating Manual Bio Wave Generator 21 LCDalhoholicar100% (1)
- See A3964SLB: Dual Full-Bridge PWM Motor DriverDocument8 pagesSee A3964SLB: Dual Full-Bridge PWM Motor DriverPaulo SwarosvishNo ratings yet
- 2 Quadrant DC Motor Field Regulator UnitDocument11 pages2 Quadrant DC Motor Field Regulator UnitbetobebetoNo ratings yet
- TFT LCD DC-DC Converter With Integrated Charge Pumps, OP-AMP and HV-SwitchDocument20 pagesTFT LCD DC-DC Converter With Integrated Charge Pumps, OP-AMP and HV-SwitchАлександрNo ratings yet
- LM3224Document18 pagesLM3224andreu_No ratings yet
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- LM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BDocument24 pagesLM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BPravin MevadaNo ratings yet
- Dobor Rezystorow B628xx StepUp Chip - vbc-VB9208-v1.0Document9 pagesDobor Rezystorow B628xx StepUp Chip - vbc-VB9208-v1.0asdfNo ratings yet
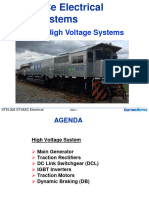
- 03 Gt46ac HV SystemsDocument56 pages03 Gt46ac HV SystemsRafael Dutil LucianaNo ratings yet
- Synchronous Rectification DC/DC Converter IC For Charging Li-Ion BatteryDocument56 pagesSynchronous Rectification DC/DC Converter IC For Charging Li-Ion BatterydigenioNo ratings yet
- Closed Loop Speed Control of PMDC MotorDocument6 pagesClosed Loop Speed Control of PMDC MotorVignesh WaranNo ratings yet
- Principles Applications ICL7660Document10 pagesPrinciples Applications ICL7660Juan F. RamosNo ratings yet
- HV Floating MOS-Gate Driver ICs Application NoteDocument24 pagesHV Floating MOS-Gate Driver ICs Application NoteEdy AchalmaNo ratings yet
- Udn2916b PDFDocument8 pagesUdn2916b PDFSerchu_29No ratings yet
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukNo ratings yet
- DiDocument5 pagesDiByron DamaniaNo ratings yet
- CLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesDocument16 pagesCLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesPeter SolyomNo ratings yet
- High Current Switching Regulators: DescriptionDocument22 pagesHigh Current Switching Regulators: DescriptionClaudio MartinsNo ratings yet
- Meter-Bus Transceiver Module Features and SpecsDocument11 pagesMeter-Bus Transceiver Module Features and Specsercan akalanNo ratings yet
- Meter-Bus Transceiver Module Features and SpecsDocument11 pagesMeter-Bus Transceiver Module Features and Specsercan akalanNo ratings yet
- LM3622 PDFDocument9 pagesLM3622 PDFPadangaNo ratings yet
- Smart Voltage Stabilizer Using PIC16F877ADocument8 pagesSmart Voltage Stabilizer Using PIC16F877AAswathy CjNo ratings yet
- An-978 HV Floating MOS Gate DriversDocument21 pagesAn-978 HV Floating MOS Gate DriversPeter RueNo ratings yet
- LM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationDocument24 pagesLM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationcsclzNo ratings yet
- L6565Document18 pagesL6565Sergio Daniel BarretoNo ratings yet
- Boost Converter Using The PIC16F753 Analog Features: Performance SpecificationsDocument9 pagesBoost Converter Using The PIC16F753 Analog Features: Performance SpecificationsSheik Ashiq AmeerNo ratings yet
- LC5910S Data Sheet: Critical Current Mode Buck LED Driver ICDocument22 pagesLC5910S Data Sheet: Critical Current Mode Buck LED Driver ICalvaro marcos manuel lopezNo ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- LNK605 DatasheetDocument18 pagesLNK605 DatasheetdgujarathiNo ratings yet
- Category Name Quantity: Chapter Three Materials, Methods and Technique 3.1 Components UsedDocument14 pagesCategory Name Quantity: Chapter Three Materials, Methods and Technique 3.1 Components Usedcaleb kemboiNo ratings yet
- AN-1951 LM3000 Evaluation Board: User's GuideDocument11 pagesAN-1951 LM3000 Evaluation Board: User's GuidechayefNo ratings yet
- Module Data Sheet: Valve Position Module (Amd)Document10 pagesModule Data Sheet: Valve Position Module (Amd)Wasim AhmedNo ratings yet
- L4981ADocument17 pagesL4981AMcu CdiiNo ratings yet
- DKG-173 DIN Rail Mounted ATS ControllerDocument2 pagesDKG-173 DIN Rail Mounted ATS ControllerRibeiro BaietaNo ratings yet
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Document16 pagesApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaNo ratings yet
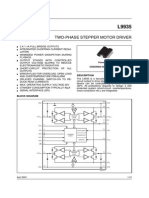
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDocument10 pagesNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNo ratings yet
- A High Step-Down Multiple Output Converter With Wide Input Voltage Range Based On Quasi Two-Stage Architecture and Dual-Output LLC Resonant ConverterDocument3 pagesA High Step-Down Multiple Output Converter With Wide Input Voltage Range Based On Quasi Two-Stage Architecture and Dual-Output LLC Resonant ConverterMaruthi JacsNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesSwitch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipGhulam AbbasNo ratings yet
- Prekidačka NapajanjaDocument48 pagesPrekidačka NapajanjaDamir PranjkovicNo ratings yet
- LM5015 Evaluation Board SchematicDocument8 pagesLM5015 Evaluation Board SchematicLokesh EshwaraiahNo ratings yet
- PWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsDocument24 pagesPWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsCarlos ArturoNo ratings yet
- 1 2 3 Doconcd Installation and Operation: Back To StartscreenDocument20 pages1 2 3 Doconcd Installation and Operation: Back To Startscreenmahdi elmayNo ratings yet
- Ordering PCBsDocument1 pageOrdering PCBsDenis Villanueva PerezNo ratings yet
- Add Info B-65395EN 01 PDFDocument14 pagesAdd Info B-65395EN 01 PDFcchcristiNo ratings yet
- 1 2 3 Doconcd Installation and Operation: Back To StartscreenDocument20 pages1 2 3 Doconcd Installation and Operation: Back To Startscreenmahdi elmayNo ratings yet
- FANUC Series 16i 18i 160i 180i-WB Programmable Parameter Input SpecificationsDocument3 pagesFANUC Series 16i 18i 160i 180i-WB Programmable Parameter Input Specificationsmahdi elmayNo ratings yet
- FANUC Series 16-18-MBTBMCTC FANUC Series 16i18i-MATA Improvement of External WorkpieceDocument4 pagesFANUC Series 16-18-MBTBMCTC FANUC Series 16i18i-MATA Improvement of External Workpiecemahdi elmayNo ratings yet
- 521 Network Card Installation EnglishDocument4 pages521 Network Card Installation Englishmahdi elmayNo ratings yet
- Ethernet Interface Board Model: If1-Et01 User's Manual: Citizen Systems Japan Co., LTDDocument24 pagesEthernet Interface Board Model: If1-Et01 User's Manual: Citizen Systems Japan Co., LTDmahdi elmayNo ratings yet
- Model: Ct-E351Et Ethernet Interface Function ManualDocument16 pagesModel: Ct-E351Et Ethernet Interface Function Manualmahdi elmayNo ratings yet
- Fanuc 16i 18i 21i Data Input OutputDocument48 pagesFanuc 16i 18i 21i Data Input OutputphuongckmNo ratings yet
- Owner's Manual: Integrated High Definition LCD TelevisionDocument62 pagesOwner's Manual: Integrated High Definition LCD TelevisionManuel MartinezNo ratings yet
- MeritecDocument2 pagesMeritecapi-3727667No ratings yet
- Effect of Lithium Doping Concentration On The Structural, Morphological and Optical Properties of NiO NanoparticlesDocument4 pagesEffect of Lithium Doping Concentration On The Structural, Morphological and Optical Properties of NiO NanoparticlesIRJAESNo ratings yet
- Eurotherm 635Document79 pagesEurotherm 635cristiNo ratings yet
- Pammi CV 2019Document5 pagesPammi CV 2019Pammi SudhakarNo ratings yet
- MAIN Electrical Parts List: FirmwareDocument5 pagesMAIN Electrical Parts List: FirmwareWilliam SequeraNo ratings yet
- Analog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsDocument12 pagesAnalog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsashishmanyanNo ratings yet
- MCG2000SSIDocument4 pagesMCG2000SSIMarco MartinezNo ratings yet
- PI33 Supported Device ListDocument266 pagesPI33 Supported Device Listaurumstar2000No ratings yet
- Measurement Guide and Programming Examples: Agilent CSA Spectrum AnalyzerDocument252 pagesMeasurement Guide and Programming Examples: Agilent CSA Spectrum AnalyzerPedro Javier Casas MalagónNo ratings yet
- Asco S300G - Manual de UsuarioDocument40 pagesAsco S300G - Manual de UsuarioImplementación OLCNo ratings yet
- Comp2024 Btest-12 (Adv) PhysicsDocument15 pagesComp2024 Btest-12 (Adv) PhysicsThe Music VaultNo ratings yet
- Harris APM6803+ - QuickStart - EditionADocument16 pagesHarris APM6803+ - QuickStart - EditionATechne PhobosNo ratings yet
- Programmable DC Electronic Load Model 6310A Series TestingDocument7 pagesProgrammable DC Electronic Load Model 6310A Series TestingRajivGnanasekaranNo ratings yet
- Derivation of Induction Motor Induced Torque EquationDocument31 pagesDerivation of Induction Motor Induced Torque Equationmalik karim dadNo ratings yet
- PhotoImpact X3 User GuideDocument194 pagesPhotoImpact X3 User GuideLika Abuladze100% (1)
- Compact Magnetic Drill Parts ListDocument6 pagesCompact Magnetic Drill Parts ListArmando De Los SantosNo ratings yet
- NC ProgrammingDocument29 pagesNC ProgrammingManju Parkavi0% (1)
- Lecture10 MOS Transistor Circuit AnalysisDocument22 pagesLecture10 MOS Transistor Circuit AnalysisKartika MunirNo ratings yet
- The ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58Document9 pagesThe ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58ax33m144No ratings yet
- Studio DriveRack Manual - OriginalDocument49 pagesStudio DriveRack Manual - OriginalMardoqueo HernándezNo ratings yet
- 515 AI01 AP Additive ControllerDocument4 pages515 AI01 AP Additive ControllerJose HuescaNo ratings yet
- Annual Procrement PLanDocument42 pagesAnnual Procrement PLanMhelody Gutierrez BelmonteNo ratings yet