You might also like
- Manual: Digital Stepper DriveDocument23 pagesManual: Digital Stepper Driverenato vitaliNo ratings yet
- JDSM2505M DatasheetDocument20 pagesJDSM2505M DatasheetArmando SandersNo ratings yet
- HBS86H Hybrid Stepper Servo Drive ManualDocument22 pagesHBS86H Hybrid Stepper Servo Drive ManualPhúc Phan TiếnNo ratings yet
- 2HSS86HDocument6 pages2HSS86HRafik Mohamed Alhaji100% (1)
- Manual 2DM860H Digital Stepper Drive: PrecisionDocument26 pagesManual 2DM860H Digital Stepper Drive: PrecisionguruNo ratings yet
- 12-Tapgggered Roller BearingsDocument20 pages12-Tapgggered Roller BearingsRafik Mohamed AlhajiNo ratings yet
- Servo Stepper Driver UK 2 HSS86Document7 pagesServo Stepper Driver UK 2 HSS86Mimo AbduNo ratings yet
- Jinan Lanjiu Electric Steering Motor User Manual V1.4Document20 pagesJinan Lanjiu Electric Steering Motor User Manual V1.4David FernándezNo ratings yet
- HSS60Document6 pagesHSS60Abraham GutierrezNo ratings yet
- 2HSS57 KH XX - JMC Nema 57 Closed Loop Stepper Driver Eng 451294Document23 pages2HSS57 KH XX - JMC Nema 57 Closed Loop Stepper Driver Eng 451294Ardiansyah AndryNo ratings yet
- SVxdatasheet- Valve ControllerDocument4 pagesSVxdatasheet- Valve ControllerMai Vạn HậuNo ratings yet
- Huong Dan REC DPR2700Document16 pagesHuong Dan REC DPR2700Chim ConNo ratings yet
- Manual: 2HSS86H-KH-XXDocument23 pagesManual: 2HSS86H-KH-XXGerard Grau100% (1)
- VfdelwDocument11 pagesVfdelwHalil YakışanNo ratings yet
- Delta Ia-Mds Vfd-El-W C en 20210420Document12 pagesDelta Ia-Mds Vfd-El-W C en 20210420suhas.ghodakeNo ratings yet
- DVC700 Series Programmable System Controller DVC710 DVC710LC Programmed With HCT's Intella Software Suite™Document8 pagesDVC700 Series Programmable System Controller DVC710 DVC710LC Programmed With HCT's Intella Software Suite™Derik Carela DiazNo ratings yet
- 20-80VDC, 10A Peak, Closed-loop Servo Drive DatasheetDocument7 pages20-80VDC, 10A Peak, Closed-loop Servo Drive DatasheetRenato KristićNo ratings yet
- Automation-Changing World Delta DriveDocument12 pagesAutomation-Changing World Delta Drivedaniel serafimNo ratings yet
- Manual: Digital Stepper DriveDocument16 pagesManual: Digital Stepper DriveWilliam BelascoNo ratings yet
- Alvanically SeparateDocument3 pagesAlvanically SeparateRobertRamosNo ratings yet
- Manual: Digital Stepper DriveDocument20 pagesManual: Digital Stepper DriveTheencyclopediaNo ratings yet
- Io 0000in01 01 0Document17 pagesIo 0000in01 01 0Raka PriaNo ratings yet
- Operation Manual of EX9065 65A 65B Series 20161004 FinalDocument37 pagesOperation Manual of EX9065 65A 65B Series 20161004 FinalphachayoNo ratings yet
- Unisonic Technologies Co., LTD: Vertical Deflection Output CircuitDocument5 pagesUnisonic Technologies Co., LTD: Vertical Deflection Output CircuitNerza ElectronicsNo ratings yet
- HEDS 5700 F12 AvagoDocument5 pagesHEDS 5700 F12 AvagoJorge SánchezNo ratings yet
- Altivar 61 - ATV61HC13N4Document5 pagesAltivar 61 - ATV61HC13N4muhammad sholeh0% (1)
- T6 Servo Quick StartDocument18 pagesT6 Servo Quick StartmNo ratings yet
- Amplificador de Audio Samsung MAX DC650Document9 pagesAmplificador de Audio Samsung MAX DC650Enya Andrea Ribba HernandezNo ratings yet
- PV PanelDocument17 pagesPV PanelMuhammad RiazNo ratings yet
- Service Manual: FMJ Cd23 Compact Disc Player (Text)Document46 pagesService Manual: FMJ Cd23 Compact Disc Player (Text)王军No ratings yet
- Altivar 61 - ATV61HD90N4Document4 pagesAltivar 61 - ATV61HD90N4Anonymous PUmoImIfONo ratings yet
- TC2000 Stereo Class-T™ Audio Controller Using Digital Power Processing (DPP™) TechnologyDocument9 pagesTC2000 Stereo Class-T™ Audio Controller Using Digital Power Processing (DPP™) TechnologyNanang BaliNo ratings yet
- Altivar 61 - ATV61HD37N4Document5 pagesAltivar 61 - ATV61HD37N4husan shahNo ratings yet
- Emdrive 500 Datasheet V2 6Document5 pagesEmdrive 500 Datasheet V2 6nathaniel benelishaNo ratings yet
- manual servo ihssDocument21 pagesmanual servo ihssgustavoNo ratings yet
- AD100 Series AC Drive Operation ManualDocument67 pagesAD100 Series AC Drive Operation ManualSegundo Tumalie100% (1)
- Ac121 Hiperface EncoderDocument4 pagesAc121 Hiperface Encodervyshnavi nallaNo ratings yet
- Altivar 61 - ATV61HD75N4ZDocument4 pagesAltivar 61 - ATV61HD75N4Zamr ibrahimNo ratings yet
- Unisonic Technologies Co., LTD: Low Power Single Op AmpDocument7 pagesUnisonic Technologies Co., LTD: Low Power Single Op AmpSolihin iingNo ratings yet
- CHF100A Operation Manual-V1.5Document153 pagesCHF100A Operation Manual-V1.5Ahmad IdreesNo ratings yet
- Altivar 61 - ATV61HD15N4Document5 pagesAltivar 61 - ATV61HD15N4Luis Orlando Rios MorenoNo ratings yet
- Batch Controllers for Models 414D & 414BDocument59 pagesBatch Controllers for Models 414D & 414BSecy PutriNo ratings yet
- Compact & Powerful AC Drives for 1HP to 5HPDocument3 pagesCompact & Powerful AC Drives for 1HP to 5HPSEBATELEC SEBATELECNo ratings yet
- ADR241CDocument11 pagesADR241CNamrata ShettiNo ratings yet
- Amp Classe Ab 2W - Tda7052Document5 pagesAmp Classe Ab 2W - Tda7052Rodrigo BonfanteNo ratings yet
- 24-Bit Analog-to-Digital Converter (ADC) With Built-In Temperature SensorDocument8 pages24-Bit Analog-to-Digital Converter (ADC) With Built-In Temperature SensorFabricio AmaguañaNo ratings yet
- Preline RTA 421: ContactorDocument6 pagesPreline RTA 421: ContactorMarco Antonio Esquivel BarretoNo ratings yet
- Tp-Pwr-Dc48-400a DS V2.0.0 CombaDocument2 pagesTp-Pwr-Dc48-400a DS V2.0.0 CombaJoão SpinaNo ratings yet
- Altivar 61 ATV61HC13N4D387Document4 pagesAltivar 61 ATV61HC13N4D387Indra SinagaNo ratings yet
- SPX3819M5 L 3 3Document13 pagesSPX3819M5 L 3 3Gaurab DasguptaNo ratings yet
- Ulv602 UtcDocument6 pagesUlv602 Utcruslan futkaradzeNo ratings yet
- Wa0023.Document2 pagesWa0023.Bob RhemNo ratings yet
- PM174 Powermeter Quick Start GuideDocument11 pagesPM174 Powermeter Quick Start Guideusamakhan205No ratings yet
- UMW Youtai Semiconductor Co - LTD SP3232EEN - C2904739Document7 pagesUMW Youtai Semiconductor Co - LTD SP3232EEN - C2904739Amin MansouriNo ratings yet
- VARIADOR TECO L510 - Brochure 2016Document6 pagesVARIADOR TECO L510 - Brochure 2016ajapaNo ratings yet
- JMC iHSV57-30 User Manual PDFDocument24 pagesJMC iHSV57-30 User Manual PDFvictor rodriguezNo ratings yet
- Digital Stepper Driver 3dm783Document23 pagesDigital Stepper Driver 3dm783rama_subbuNo ratings yet
- PDFDocument2 pagesPDFsaravananNo ratings yet
- Omni Plus SummDocument133 pagesOmni Plus SummmuhammedasifNo ratings yet
- Information: Operating Controls 2 2Document12 pagesInformation: Operating Controls 2 2muhammedasifNo ratings yet
- D Sap 0044789Document5 pagesD Sap 0044789muhammedasifNo ratings yet
- Creeping Speed G6200Document16 pagesCreeping Speed G6200muhammedasif100% (1)
- MMV1205SDocument4 pagesMMV1205SmuhammedasifNo ratings yet
- 723PLUS Digital DSLC/MSLC Gateway: Product Manual 02831 (Revision C)Document112 pages723PLUS Digital DSLC/MSLC Gateway: Product Manual 02831 (Revision C)masudalamNo ratings yet
- Nannuri Niu 0162M 12113Document56 pagesNannuri Niu 0162M 12113ltdswss100% (1)
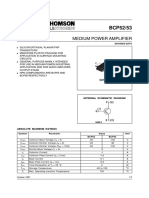
- Medium Power Amplifier: Advance DataDocument4 pagesMedium Power Amplifier: Advance DataJose M PeresNo ratings yet
- PDFDocument88 pagesPDFmuhammedasifNo ratings yet
- Schematic 1Document1 pageSchematic 1muhammedasifNo ratings yet
- z0847006psg PDFDocument330 pagesz0847006psg PDFmuhammedasifNo ratings yet
- 4 2pwrsply MSGDocument41 pages4 2pwrsply MSGjohn smithNo ratings yet
- PDFDocument88 pagesPDFmuhammedasifNo ratings yet
- Design Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFDocument37 pagesDesign Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFSamuel Mushaka100% (1)
- Safety Instructions: Warning CautionDocument141 pagesSafety Instructions: Warning CautionCarlos Rafael Chota ArévaloNo ratings yet
- 723PLUS Digital DSLC/MSLC Gateway: Product Manual 02831 (Revision C)Document112 pages723PLUS Digital DSLC/MSLC Gateway: Product Manual 02831 (Revision C)masudalamNo ratings yet
- NsaDocument8 pagesNsamuhammedasifNo ratings yet
- Introduction To Arduino and LedsDocument26 pagesIntroduction To Arduino and LedsJhoanie Marie CauanNo ratings yet
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- 3100 ManualDocument158 pages3100 ManualEdgar Gonzalez100% (8)
- Installation Instructions for PowerCommand 3100 FT-10 Network GCM KitDocument6 pagesInstallation Instructions for PowerCommand 3100 FT-10 Network GCM KitibrahemNo ratings yet
- DSE710Document26 pagesDSE710Muhammad Umer Adnan33% (3)
- Installation Instructions for PowerCommand 3100 FT-10 Network GCM KitDocument6 pagesInstallation Instructions for PowerCommand 3100 FT-10 Network GCM KitibrahemNo ratings yet
- Combivert: Instruction ManualDocument36 pagesCombivert: Instruction Manualruisengo100% (1)
- DANFOSS CascadeControllerOptionInstructionManual PDFDocument68 pagesDANFOSS CascadeControllerOptionInstructionManual PDFRandy LangleyNo ratings yet
- 4 2pwrsply MSGDocument41 pages4 2pwrsply MSGjohn smithNo ratings yet
- Weaving Chapter4d Jacquard2Document33 pagesWeaving Chapter4d Jacquard2Alvarin CsboyNo ratings yet
- Fire Phone User Guide-En US PDFDocument151 pagesFire Phone User Guide-En US PDFmuhammedasifNo ratings yet
- 20 A18 Terminal ID PDFDocument220 pages20 A18 Terminal ID PDFMohammedasif100% (2)
- 900-0545 I3iWatch100Document87 pages900-0545 I3iWatch100thegr8t1No ratings yet
- PHYS 101 Midterm Exam 1 SolutionsDocument3 pagesPHYS 101 Midterm Exam 1 SolutionsTuğba AydemirNo ratings yet
- Student Guidance Cell-NITC Chemistry QuestionsDocument5 pagesStudent Guidance Cell-NITC Chemistry QuestionsVedurupaka Venkata SaiNo ratings yet
- Vibracord. Vibration Meter Summary Sheet (Graphic) : Record Time: 2 SDocument1 pageVibracord. Vibration Meter Summary Sheet (Graphic) : Record Time: 2 Sahmad nhNo ratings yet
- Costos y PresupuestosDocument7 pagesCostos y Presupuestosjuan rosasNo ratings yet
- Lecture Notes: Principle of Physics IIDocument10 pagesLecture Notes: Principle of Physics IITARANNAUM JAHAN SULTANNo ratings yet
- 11 000 Measuring Equipment SummaryDocument38 pages11 000 Measuring Equipment SummaryAdrian GarciaNo ratings yet
- Daily Lesson Log: Day 1 Day 2 Day 3 Day 4Document8 pagesDaily Lesson Log: Day 1 Day 2 Day 3 Day 4leny santosNo ratings yet
- Physics SolvedDocument16 pagesPhysics SolvedAbhijeet Singh PanwarNo ratings yet
- Caudalímetros Electromagnéticos ISO-9104-1991-3Document28 pagesCaudalímetros Electromagnéticos ISO-9104-1991-3pepo123100% (1)
- Lightning Performance Study For Photovoltaic Systems: August 2015Document6 pagesLightning Performance Study For Photovoltaic Systems: August 2015maverick2660No ratings yet
- Dwnload Full Electrical Engineering Concepts and Applications 1st Edition Reza Zekavat Solutions Manual PDFDocument36 pagesDwnload Full Electrical Engineering Concepts and Applications 1st Edition Reza Zekavat Solutions Manual PDFwonders.stufferlx27100% (10)
- 2005 - Betz - Summers - Introduction To Symmetrical Components and Their Use in STATCOM ApplicationsDocument146 pages2005 - Betz - Summers - Introduction To Symmetrical Components and Their Use in STATCOM ApplicationsIosu MarzoNo ratings yet
- 21-01-2023 - SR - Super60 - NUCLEUS & ALL - BT - Jee-Main-GTM-11 - KEY & Sol'SDocument20 pages21-01-2023 - SR - Super60 - NUCLEUS & ALL - BT - Jee-Main-GTM-11 - KEY & Sol'SkasalachinuNo ratings yet
- Iso 9248.1992Document8 pagesIso 9248.1992bugseNo ratings yet
- Guno, Lea H. 40 Problems - Surveying & TranspoDocument8 pagesGuno, Lea H. 40 Problems - Surveying & TranspoLea GunoNo ratings yet
- Data Sheet Control Valve FisherDocument9 pagesData Sheet Control Valve FisherFIRMANSYAHNo ratings yet
- General Chemistry 2Document25 pagesGeneral Chemistry 2Jerry De Leon TaayNo ratings yet
- Chapter 3: Momentum and ImpulseDocument3 pagesChapter 3: Momentum and ImpulsePriyaa JayasankarNo ratings yet
- CH 7 Ac Worksheet 2022Document5 pagesCH 7 Ac Worksheet 2022Hamad FarooqueNo ratings yet
- Asme PTC 19Document2 pagesAsme PTC 19Francis Dela TorreNo ratings yet
- Specific Heat Capacity Measurements Using DSC I: TemperatureDocument4 pagesSpecific Heat Capacity Measurements Using DSC I: Temperaturenermeen ahmedNo ratings yet
- DELTA 4000: Reference Manual Applications GuideDocument48 pagesDELTA 4000: Reference Manual Applications GuideNamir DinNo ratings yet
- CHAPTER 03-20200827-v8Document28 pagesCHAPTER 03-20200827-v8pattrapong pongpattraNo ratings yet
- Embraco EM65HHRDocument4 pagesEmbraco EM65HHROTOMASYON PLCNo ratings yet
- DC CIRCUIT TITLEDocument17 pagesDC CIRCUIT TITLEWAN AHMAD AFIQ WAN HUZAIRUL AZRILNo ratings yet
- Grade X Ch.13 Ex 13.1Document8 pagesGrade X Ch.13 Ex 13.1MoghanNo ratings yet
- Calculus-Based Physics 2 Prelim Quiz 2Document8 pagesCalculus-Based Physics 2 Prelim Quiz 2Nicoco LocoNo ratings yet
- Degetted,: Fance On A in Ficld &Document11 pagesDegetted,: Fance On A in Ficld &AnkitNo ratings yet
- Geometry and Mensuration Questions for CAT PDFDocument11 pagesGeometry and Mensuration Questions for CAT PDFYashraj Singh ChauhanNo ratings yet
- P1 Recall QsDocument3 pagesP1 Recall QsHayleyNo ratings yet