You might also like
- Relating Volume Loss and Greenfield S - 2019 - Tunnelling and Underground SpaceDocument8 pagesRelating Volume Loss and Greenfield S - 2019 - Tunnelling and Underground Spacezimbazimba75No ratings yet
- Rowe and Kack CGJ 20 (2) 299-314Document16 pagesRowe and Kack CGJ 20 (2) 299-314nesrine EL HOUARINo ratings yet
- Tunnelling Methods in 2D FE AnalysisDocument10 pagesTunnelling Methods in 2D FE AnalysisDidaBouchNo ratings yet
- TBM Tunnelling-Induced Settlements in Coarse-Grained Soils The Case of The New Milan Underground Line 5Document12 pagesTBM Tunnelling-Induced Settlements in Coarse-Grained Soils The Case of The New Milan Underground Line 5Aida RafrinNo ratings yet
- Settlement Analyses of Underground Circular Tunneling in Soft ClayDocument6 pagesSettlement Analyses of Underground Circular Tunneling in Soft ClayChin Thau WuiNo ratings yet
- Specifying The Real Value of Volume Loss (VL) and Its EffectDocument17 pagesSpecifying The Real Value of Volume Loss (VL) and Its EffectAida RafrinNo ratings yet
- Schneider Muntau Bathaeian2018 Article SimulationOfSettlementAndBeariDocument17 pagesSchneider Muntau Bathaeian2018 Article SimulationOfSettlementAndBeariAbderrahmane AbdelahelhirtsiNo ratings yet
- A Simplified 3D Model For Tunnel Constru PDFDocument8 pagesA Simplified 3D Model For Tunnel Constru PDFmightsrightNo ratings yet
- Sand Deformation Around An Uplift Plate Anchor: Jinyuan Liu, P.E., P.Eng., M.ASCE Mingliang Liu and Zhende ZhuDocument10 pagesSand Deformation Around An Uplift Plate Anchor: Jinyuan Liu, P.E., P.Eng., M.ASCE Mingliang Liu and Zhende ZhurkNo ratings yet
- Influence of A Low Resistance Layer On Seismic Soil Response Using CyberquakeDocument8 pagesInfluence of A Low Resistance Layer On Seismic Soil Response Using CyberquakeAhmed boudghene stambouliNo ratings yet
- Devriendt, M. (2010) - Risk Analysis For Tunnelling Ground Movement Assessments PDFDocument10 pagesDevriendt, M. (2010) - Risk Analysis For Tunnelling Ground Movement Assessments PDFamir hossein KabiriNo ratings yet
- Greenfield Tunnelling in Sands: The Effects of Soil Density and Relative DepthDocument11 pagesGreenfield Tunnelling in Sands: The Effects of Soil Density and Relative DepthEvers Quispe CallasacaNo ratings yet
- Abu - Farsakh e Voyiadjis (1999) - Computational Model Fo The Simulation of The Shield Tunnel Process in Cohesive SoilsDocument22 pagesAbu - Farsakh e Voyiadjis (1999) - Computational Model Fo The Simulation of The Shield Tunnel Process in Cohesive SoilsFederico MalteseNo ratings yet
- Volume Loss in Shallow TunnellingDocument14 pagesVolume Loss in Shallow TunnellingAida RafrinNo ratings yet
- IOM3 Underground Design Conference 2015Document11 pagesIOM3 Underground Design Conference 2015Kumar Kalyan100% (1)
- Karak Us 2005Document11 pagesKarak Us 2005DidaBouchNo ratings yet
- Assessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsDocument14 pagesAssessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsHT BinhNo ratings yet
- Dynamic Analysis of Two Adjacent TunnelsDocument8 pagesDynamic Analysis of Two Adjacent TunnelsAniruddha BhaduriNo ratings yet
- 3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDocument13 pages3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDidaBouchNo ratings yet
- PAP320Document11 pagesPAP320sbaia amineNo ratings yet
- The Influence of Different Tunnel Cross Sections On Surface SettlementDocument8 pagesThe Influence of Different Tunnel Cross Sections On Surface Settlementkksamy2007No ratings yet
- Gonzleznicieza 2008Document13 pagesGonzleznicieza 2008Sérgio BernardesNo ratings yet
- Geotextiles and Geomembranes: Balaka Ghosh, Behzad Fatahi, Hadi Khabbaz, Huu Hung Nguyen, Richard KellyDocument21 pagesGeotextiles and Geomembranes: Balaka Ghosh, Behzad Fatahi, Hadi Khabbaz, Huu Hung Nguyen, Richard KellyjyjiaNo ratings yet
- Evaluation of Coal Longwall Caving Characteristics Using An Innovative UDEC Trigon ApproachDocument13 pagesEvaluation of Coal Longwall Caving Characteristics Using An Innovative UDEC Trigon Approachningbo zhangNo ratings yet
- Response of Clay Soil To Three-Dimensional Tunnelling Simulation in Centrifuge ModelsDocument11 pagesResponse of Clay Soil To Three-Dimensional Tunnelling Simulation in Centrifuge ModelsRaza MirNo ratings yet
- Wellcome Lect Guaruja-Com Luiz, Romero e Orêncio-2010Document39 pagesWellcome Lect Guaruja-Com Luiz, Romero e Orêncio-2010Rose CarvalhoNo ratings yet
- Cuadro 2Document11 pagesCuadro 2Ruben SoteloNo ratings yet
- Parameters and Considerations in Soft Ground Tunneling: Wooi Leong TanDocument18 pagesParameters and Considerations in Soft Ground Tunneling: Wooi Leong TanngodangquangNo ratings yet
- Numerical Modelling of The Stability of Metro Tunnel StationsDocument12 pagesNumerical Modelling of The Stability of Metro Tunnel StationsLuis Fernando Camasca ÑaupariNo ratings yet
- Finite Element Analysis of A Deep Excavation in Kenny Hill Formation 2018Document7 pagesFinite Element Analysis of A Deep Excavation in Kenny Hill Formation 2018BinSayeedNo ratings yet
- Design Charts For Geogrid-Reinforced Granular WorkDocument22 pagesDesign Charts For Geogrid-Reinforced Granular WorkAbdelmoez ElgarfNo ratings yet
- Evaluation of The NATM Tunnel Load On Concrete Lining Using The Ground Lining Interaction ModelDocument11 pagesEvaluation of The NATM Tunnel Load On Concrete Lining Using The Ground Lining Interaction ModelRAJAT PURWARNo ratings yet
- Effect of Earthquake on Piles in Sloping GroundDocument4 pagesEffect of Earthquake on Piles in Sloping GroundrkNo ratings yet
- TS1401 - 7009Document6 pagesTS1401 - 7009Amir BOUSTILANo ratings yet
- A Shaft Pillar Mining Subsidence Calculation Using Both Probability Integral Method and Numerical SimulationDocument20 pagesA Shaft Pillar Mining Subsidence Calculation Using Both Probability Integral Method and Numerical SimulationAida RafrinNo ratings yet
- Analysis of Surface Settlement Due To The Construction of A Shield Tunnel in Soft Clay in ShanghaiDocument6 pagesAnalysis of Surface Settlement Due To The Construction of A Shield Tunnel in Soft Clay in ShanghaiADAMNo ratings yet
- Assessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsDocument14 pagesAssessment of Soil Nailing Performance by Using Finite Element and Finite Difference MethodsnidhisasidharanNo ratings yet
- South Toulon Tube: Numerical Back-Analysis of In-Situ MeasurementsDocument4 pagesSouth Toulon Tube: Numerical Back-Analysis of In-Situ MeasurementsNISHANT ROYNo ratings yet
- Ajcea 5 4 1 PDFDocument12 pagesAjcea 5 4 1 PDFPranavaDartNo ratings yet
- Do 2013Document16 pagesDo 2013DidaBouchNo ratings yet
- Tunnels Part 2Document66 pagesTunnels Part 2MCNo ratings yet
- The Volume Loss: Real Estimation and Its Effect On Surface Settlements Due To Excavation of Tabriz Metro TunnelDocument22 pagesThe Volume Loss: Real Estimation and Its Effect On Surface Settlements Due To Excavation of Tabriz Metro TunnelMuhammadImranShahzadNo ratings yet
- Paperpdf 1696 HajDocument8 pagesPaperpdf 1696 HajBilal Adeel WithraNo ratings yet
- 3D Mechanical Earth Model For Optimized Wellbore Stability, A Case Study From South of IraqDocument12 pages3D Mechanical Earth Model For Optimized Wellbore Stability, A Case Study From South of IraqLareeb MoeenNo ratings yet
- Bored Tunnel Lining Design in Soft Soils - Analytical vs NumericalDocument7 pagesBored Tunnel Lining Design in Soft Soils - Analytical vs NumericalDEBASISNo ratings yet
- The Simplified KZP6 Method For Tieback Wall Design in Granular AnDocument4 pagesThe Simplified KZP6 Method For Tieback Wall Design in Granular AnSADIK MUZEYINNo ratings yet
- Attewell Yeates Tunnelling in Soil - Prediction of Ground MovementsDocument5 pagesAttewell Yeates Tunnelling in Soil - Prediction of Ground Movementsmwyyap100% (1)
- Stability Analysis of Soil Slope Subjected To Blast Induced Vibrations Using FLACDocument11 pagesStability Analysis of Soil Slope Subjected To Blast Induced Vibrations Using FLACResmi RosaliniNo ratings yet
- Important 5Document9 pagesImportant 5Ahmed khushalNo ratings yet
- A Numerical Study of The Effect of Soil and Grout Material PropertiesDocument14 pagesA Numerical Study of The Effect of Soil and Grout Material PropertiesGeotech Designers IITMNo ratings yet
- Answer Any 4 QuestionsDocument13 pagesAnswer Any 4 QuestionsYUK LAM WONGNo ratings yet
- ASCE Paper Pipeline-LandslideDocument8 pagesASCE Paper Pipeline-LandslideManuel MoyaNo ratings yet
- FMMG Technical Note - ETAME12-1 Advanced Final Engineering (FINAL)Document11 pagesFMMG Technical Note - ETAME12-1 Advanced Final Engineering (FINAL)William O OkolotuNo ratings yet
- UGS 2005 - Evaluation of Modified Cam Clay Parameters For Deep Excavation AnalysisDocument12 pagesUGS 2005 - Evaluation of Modified Cam Clay Parameters For Deep Excavation AnalysisAnna SuuNo ratings yet
- Reduction of Box Culvert StressesDocument6 pagesReduction of Box Culvert StressesTakis ApostolidesNo ratings yet
- ภาพถ่ายหน้าจอ 2564-03-21 เวลา 13.19.13Document14 pagesภาพถ่ายหน้าจอ 2564-03-21 เวลา 13.19.13Suraparb KeawsawasvongNo ratings yet
- 10 - Ground MovementsDocument48 pages10 - Ground MovementsanarNo ratings yet
- 1 s2.0 S0886779806000976 MainDocument17 pages1 s2.0 S0886779806000976 MainAmanNo ratings yet
- Effect of Soil Constitutive Models On Determination of Deformations Caused by Deep-ExcavationsDocument19 pagesEffect of Soil Constitutive Models On Determination of Deformations Caused by Deep-ExcavationsFoolad Gharb100% (1)
- Settlement Effects of Bored TunnelsDocument12 pagesSettlement Effects of Bored TunnelsAida RafrinNo ratings yet
- Specifying The Real Value of Volume Loss (VL) and Its EffectDocument17 pagesSpecifying The Real Value of Volume Loss (VL) and Its EffectAida RafrinNo ratings yet
- The Volume Loss: Real Estimation and Its Effect On Surface Settlements Due To Excavation of Tabriz Metro TunnelDocument22 pagesThe Volume Loss: Real Estimation and Its Effect On Surface Settlements Due To Excavation of Tabriz Metro TunnelMuhammadImranShahzadNo ratings yet
- Control of Settlement and Volume Loss Induced by Tunneling Under Recently Reclaimed LandDocument13 pagesControl of Settlement and Volume Loss Induced by Tunneling Under Recently Reclaimed LandAida RafrinNo ratings yet
- Tunnels in Sands The Effect of Size, Depth and Volume Loss On GreenfieldDocument16 pagesTunnels in Sands The Effect of Size, Depth and Volume Loss On GreenfieldAida RafrinNo ratings yet
- Formula For Predicting Ground Settlement Induced by Tunnelling Based On Gaussian FunctionDocument22 pagesFormula For Predicting Ground Settlement Induced by Tunnelling Based On Gaussian FunctionAida RafrinNo ratings yet
- Prediction of Subsidence During TBM Operation in Mixed-Face Ground Condition From Realtime Monitoring DataDocument20 pagesPrediction of Subsidence During TBM Operation in Mixed-Face Ground Condition From Realtime Monitoring DataAida RafrinNo ratings yet
- Prediction of Ground Settlement Induced by Slurry Shield Tunnelling in Granular SoilsDocument18 pagesPrediction of Ground Settlement Induced by Slurry Shield Tunnelling in Granular SoilsAida RafrinNo ratings yet
- (2083831X - Studia Geotechnica Et Mechanica) Slurry Shield Tunneling in Soft Ground. Comparison Between Field Data and 3D Numerical Simulation PDFDocument14 pages(2083831X - Studia Geotechnica Et Mechanica) Slurry Shield Tunneling in Soft Ground. Comparison Between Field Data and 3D Numerical Simulation PDFMasihullah EbadiNo ratings yet
- A Shaft Pillar Mining Subsidence Calculation Using Both Probability Integral Method and Numerical SimulationDocument20 pagesA Shaft Pillar Mining Subsidence Calculation Using Both Probability Integral Method and Numerical SimulationAida RafrinNo ratings yet
- Tall Building Subsidence Data Regression Analysis Methods and The Final Settlement Value PredictionDocument5 pagesTall Building Subsidence Data Regression Analysis Methods and The Final Settlement Value PredictionAida RafrinNo ratings yet
- Fundamentals of Slope DesignDocument26 pagesFundamentals of Slope DesignPaul KireevNo ratings yet
- Active Learning For Accurate Settlement Prediction Using Numerical Simulations in Mechanized TunnelingDocument7 pagesActive Learning For Accurate Settlement Prediction Using Numerical Simulations in Mechanized TunnelingAida RafrinNo ratings yet
- A Comprehensive Method For Subsidence Prediction On Two-Seam Longwall MiningDocument18 pagesA Comprehensive Method For Subsidence Prediction On Two-Seam Longwall MiningAida RafrinNo ratings yet
- FinalversionMscthesis DeJongDocument104 pagesFinalversionMscthesis DeJongAida RafrinNo ratings yet
- Soil PropertiesDocument24 pagesSoil PropertiesHussein BeqaiNo ratings yet
- A Comprehensive Method For Subsidence Prediction On Two-Seam Longwall MiningDocument18 pagesA Comprehensive Method For Subsidence Prediction On Two-Seam Longwall MiningAida RafrinNo ratings yet
- Effects of Water On Slope Stability - 3 PDFDocument44 pagesEffects of Water On Slope Stability - 3 PDFreem.ranoom.moonNo ratings yet
- 4 Shear Strength of Discontinuities PDFDocument14 pages4 Shear Strength of Discontinuities PDFAnonymous Re62LKaACNo ratings yet
- PT Amir Hajar Kilsi - Geomechanical Processes Underground MiningDocument249 pagesPT Amir Hajar Kilsi - Geomechanical Processes Underground MiningPT. AMIR HAJAR KILSI RembangNo ratings yet
- Dream Films Lotr2Document6 pagesDream Films Lotr2Aida RafrinNo ratings yet
- Malkowski AGG 2015 0034Document12 pagesMalkowski AGG 2015 0034Aida RafrinNo ratings yet
- Engineering Geologic Factors Influencing The Stability of SlopesDocument487 pagesEngineering Geologic Factors Influencing The Stability of SlopesAida RafrinNo ratings yet
- 1209078Document4 pages1209078Aida RafrinNo ratings yet
- Effects of Indentation Speed and Water Saturation Level On The BeDocument124 pagesEffects of Indentation Speed and Water Saturation Level On The BeAida RafrinNo ratings yet
- Byrnes 1996 ReservoirCharacteristics PDFDocument12 pagesByrnes 1996 ReservoirCharacteristics PDFAida RafrinNo ratings yet
- 07 Simulation of Water PDFDocument27 pages07 Simulation of Water PDFAida RafrinNo ratings yet
- Effect of Water-Head Change On Seepage and Slope StabilityDocument4 pagesEffect of Water-Head Change On Seepage and Slope Stabilityscribactive2010No ratings yet
- GypsumDocument79 pagesGypsumMansi GirotraNo ratings yet
- David Lawrence CVDocument32 pagesDavid Lawrence CVM.Awais AkhterNo ratings yet
- Shadows On The Moon by Zoe Marriott ExtractDocument20 pagesShadows On The Moon by Zoe Marriott ExtractWalker Books100% (1)
- Assignment 12Document7 pagesAssignment 12Anonymous mqIqN5zNo ratings yet
- GREEN AIR CONDITIONER Mechanical Presentation TopicsDocument9 pagesGREEN AIR CONDITIONER Mechanical Presentation TopicsCerin91No ratings yet
- The Cactus and the SnowsDocument22 pagesThe Cactus and the SnowsCrisNo ratings yet
- Packaging Materials and Handling Technique: Dr. Ranjeet SinghDocument48 pagesPackaging Materials and Handling Technique: Dr. Ranjeet Singharon demagiba100% (1)
- FV10 Excel Flux Tutorial en 2Document36 pagesFV10 Excel Flux Tutorial en 2Ahcene BouzidaNo ratings yet
- Quarter 1-Module 2 Modern ArtDocument20 pagesQuarter 1-Module 2 Modern ArtKimberly Trocio Kim100% (1)
- AstigmatismDocument1 pageAstigmatismAmmellya PutriNo ratings yet
- Analog Layout Design (Industrial Training)Document10 pagesAnalog Layout Design (Industrial Training)Shivaksh SharmaNo ratings yet
- RedactedDocument24 pagesRedactedJohn HarrisNo ratings yet
- Estimation of Fabric Opacity by ScannerDocument7 pagesEstimation of Fabric Opacity by ScannerJatiKrismanadiNo ratings yet
- Module 2 Chem 1Document25 pagesModule 2 Chem 1melissa cabreraNo ratings yet
- Whirlpool - Service Information Frontloader Washing Machine AWO/D 43115Document53 pagesWhirlpool - Service Information Frontloader Washing Machine AWO/D 43115amandialopes50% (2)
- Capacitores Electroliticos SMDDocument8 pagesCapacitores Electroliticos SMDalvaro marrugoNo ratings yet
- Ex 2013 1 (Recurrent)Document30 pagesEx 2013 1 (Recurrent)alh basharNo ratings yet
- Maximizing Area and Minimizing Costs with CalculusDocument18 pagesMaximizing Area and Minimizing Costs with Calculusanon_218576188No ratings yet
- Juxtaposition and Non Motion Varese BridDocument13 pagesJuxtaposition and Non Motion Varese BridIvan Eiji Yamauchi SimurraNo ratings yet
- Blackmer Pump Parts ListDocument2 pagesBlackmer Pump Parts ListFelipe Ignacio PaillavilNo ratings yet
- AAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)Document3 pagesAAB 075323 EPDM Waterproofing Membrane (For RC Roof Build-Up Inc. Insulation)tewodrosNo ratings yet
- Mec 323Document68 pagesMec 323VINAY B.SNo ratings yet
- C32 MOTOR CAT Electronic Unit Injector - TestDocument2 pagesC32 MOTOR CAT Electronic Unit Injector - TestFreddy Villegas100% (1)
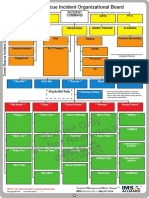
- Sample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardDocument1 pageSample Only Do Not Reproduce: Trench Rescue Incident Organizational BoardLuis Diaz CerdanNo ratings yet
- Commsec - Co Profile - 20150521Document14 pagesCommsec - Co Profile - 20150521Muhammad Nisar KhanNo ratings yet
- Principles of Marketing - Product, Service and Experience DifferencesDocument26 pagesPrinciples of Marketing - Product, Service and Experience DifferencesVivien Leigh LopezNo ratings yet
- DesignDocument2 pagesDesignAmr AbdalhNo ratings yet
- Foundation of EducationDocument31 pagesFoundation of EducationM T Ząřřąř100% (1)
- Interfacial Phenomena in Pharmaceutical FormulationDocument21 pagesInterfacial Phenomena in Pharmaceutical FormulationNickson DrabeNo ratings yet
- Caelus TT - Caelus Product TrainingDocument93 pagesCaelus TT - Caelus Product TrainingYader Daniel Ortiz CerdaNo ratings yet