You might also like
- 實驗一 結報Document11 pages實驗一 結報JimmyNo ratings yet
- 電磁波實驗八105501016游澈Document6 pages電磁波實驗八105501016游澈arnoNo ratings yet
- Ev500 PDFDocument183 pagesEv500 PDFحماد النشاشNo ratings yet
- 2 3荷質比 A5Document10 pages2 3荷質比 A5y5k26smy4xNo ratings yet
- 圓錐的極限與配合及角度與錐度的檢測Document31 pages圓錐的極限與配合及角度與錐度的檢測Alan tsaiNo ratings yet
- 2302Document4 pages2302廖菉菉No ratings yet
- 427 0 p004 005 Kuo - 20181001132539 PDFDocument2 pages427 0 p004 005 Kuo - 20181001132539 PDFAnonymous cE5rH0HNo ratings yet
- 清大普物實驗1結報Document5 pages清大普物實驗1結報穆宣融No ratings yet
- HJT289 2006汽油车双怠速法排气污染物测量设备技术要求Document32 pagesHJT289 2006汽油车双怠速法排气污染物测量设备技术要求lei gaoNo ratings yet
- 聚烯烃催化剂中邻苯二甲酸二正丁酯定量分析的近红外方法研究Document6 pages聚烯烃催化剂中邻苯二甲酸二正丁酯定量分析的近红外方法研究Philip ShihNo ratings yet
- BS 410-1-2000翻译 Test sieves. Technical requirements and testing. Test sieves of metal wire cloth.en.zh-CNDocument22 pagesBS 410-1-2000翻译 Test sieves. Technical requirements and testing. Test sieves of metal wire cloth.en.zh-CNbohan zengNo ratings yet
- G31 1 校正領域非自動衡器校正指引 PDFDocument72 pagesG31 1 校正領域非自動衡器校正指引 PDF楊宗棠No ratings yet
- 轉動慣量Document9 pages轉動慣量趙方慈No ratings yet
- Bts 800cr全站仪说明书Document116 pagesBts 800cr全站仪说明书ayanNo ratings yet
- 协助 量具 RR 研究Document15 pages协助 量具 RR 研究zhou alphaNo ratings yet
- CN111896026BDocument19 pagesCN111896026BErockNo ratings yet
- ZTC2000E753技术规格书2020年10月第1版Document113 pagesZTC2000E753技术规格书2020年10月第1版Lorre HuNo ratings yet
- 10 3 PDFDocument27 pages10 3 PDF林進光No ratings yet
- E 31028 Abfac 856 F 69790Document10 pagesE 31028 Abfac 856 F 69790api-516943376No ratings yet
- R05543062 林宗佑 Air jetDocument20 pagesR05543062 林宗佑 Air jet林宗佑No ratings yet
- 手機保護面板之自動化光學檢測系統Document12 pages手機保護面板之自動化光學檢測系統自动化工程师DIYNo ratings yet
- 汽機葉根裂縫自動化渦流檢測法及可靠度分析20231010Document12 pages汽機葉根裂縫自動化渦流檢測法及可靠度分析20231010yhwu01No ratings yet
- 中国质量协会注册六西格玛黑带考试样题(2014版)Document24 pages中国质量协会注册六西格玛黑带考试样题(2014版)dlg20180722No ratings yet
- JBT 9157球涨Document7 pagesJBT 9157球涨xuliminNo ratings yet
- Jjg 830-2007 深度指示表 高清晰版Document14 pagesJjg 830-2007 深度指示表 高清晰版向炎龙No ratings yet
- Canon FPA-3000i5+ Stepper: FeaturesDocument20 pagesCanon FPA-3000i5+ Stepper: FeaturesTomi NakaNo ratings yet
- 一、實驗目的:研究複擺特性,並利用克特-可倒擺 (Kater's reversible pendulum) ,測 定重力加速度 二、 實驗原理: 任何形狀的剛體,若安置一個不 通 過質心的水平轉軸擺動,即稱為 複 擺。 圖中,為一質量為 M 的複擺,Document14 pages一、實驗目的:研究複擺特性,並利用克特-可倒擺 (Kater's reversible pendulum) ,測 定重力加速度 二、 實驗原理: 任何形狀的剛體,若安置一個不 通 過質心的水平轉軸擺動,即稱為 複 擺。 圖中,為一質量為 M 的複擺,WAI PAN WONGNo ratings yet
- 丙烯进料泵的故障分析和对策Document5 pages丙烯进料泵的故障分析和对策Philip ShihNo ratings yet
- JTT 445-2008 汽车底盘测功机Document21 pagesJTT 445-2008 汽车底盘测功机Yundi GaoNo ratings yet
- BY系列液力变速器参数表及外形图2006版Document24 pagesBY系列液力变速器参数表及外形图2006版chtoil2020No ratings yet
- 测绘知识规范及限差Document14 pages测绘知识规范及限差api-3778930100% (1)
- Prediction of Fixturing Errors and Tilted Working Plane Compensation For Five-Axis CNC Machine ToolsDocument7 pagesPrediction of Fixturing Errors and Tilted Working Plane Compensation For Five-Axis CNC Machine ToolsdiaboloboyNo ratings yet
- 光刻投影物镜畸变检测技术 曹译莎 上光所 202205Document17 pages光刻投影物镜畸变检测技术 曹译莎 上光所 202205personkingNo ratings yet
- 5G寬頻天線設計Document18 pages5G寬頻天線設計劉清華No ratings yet
- GB1499 2-钢筋混凝土用热轧带肋钢筋Document15 pagesGB1499 2-钢筋混凝土用热轧带肋钢筋翟庆祥No ratings yet
- Probatoire CompileDocument35 pagesProbatoire CompileCarmen Demgne100% (1)
- GBT 8564-2003 CHN PDFDocument66 pagesGBT 8564-2003 CHN PDFWalter CalleNo ratings yet
- CNAS-TRL-004:2017 第 1 页 共 12 页Document12 pagesCNAS-TRL-004:2017 第 1 页 共 12 页ly1328067No ratings yet
- 2TDQE B008 0020生產機器設備檢驗計劃書Document10 pages2TDQE B008 0020生產機器設備檢驗計劃書a890205aNo ratings yet
- GB1804Document4 pagesGB1804gm_revankar0% (1)
- 021-Vertical Cavity Surface Emitting LasersDocument11 pages021-Vertical Cavity Surface Emitting LasersMichael KaoNo ratings yet
- V2500发动机振动配平简析Document2 pagesV2500发动机振动配平简析rockegg940202No ratings yet
- 测量设备校准周期的确定和调整方法指南Document12 pages测量设备校准周期的确定和调整方法指南吴喜平No ratings yet
- 機車惰轉停等設備不同油耗測試程序研究 (2018)Document8 pages機車惰轉停等設備不同油耗測試程序研究 (2018)王冠堯No ratings yet
- 测量齿轮行业标准Document7 pages测量齿轮行业标准qi.lu3No ratings yet
- CN109737946ADocument12 pagesCN109737946Asalman shahNo ratings yet
- Group8 IBRM Assin04 Data 20221011Document5 pagesGroup8 IBRM Assin04 Data 20221011jinklad47No ratings yet
- 16 40300-9HF7A Gauge R&RDocument23 pages16 40300-9HF7A Gauge R&RJorge LopezNo ratings yet
- 水泥添加物Document16 pages水泥添加物卓俊良No ratings yet
- GB-T 2883-2002 工程机械轮辋规格系列 PDFDocument16 pagesGB-T 2883-2002 工程机械轮辋规格系列 PDFcumtjerryNo ratings yet
- Surveying Chapter1Document43 pagesSurveying Chapter1ZenPhi100% (1)
- 4 π = ∗P −l ∗P −lDocument3 pages4 π = ∗P −l ∗P −l吳宗勳No ratings yet
- 談室內機械排煙系統價值工程分析 20190820Document12 pages談室內機械排煙系統價值工程分析 20190820Odin AtlasNo ratings yet
- 未命名簡報Document23 pages未命名簡報zero zeroNo ratings yet
- 某直升机抛放式引燃物分离过程研究 第2章全尺寸直升机悬停抛放引燃物模型真机试验 19 39 朱亚男Document21 pages某直升机抛放式引燃物分离过程研究 第2章全尺寸直升机悬停抛放引燃物模型真机试验 19 39 朱亚男shiguangmodiNo ratings yet
- AAMA 2605 05 (中文版) 铝制品喷漆Document9 pagesAAMA 2605 05 (中文版) 铝制品喷漆秦川No ratings yet
- 光伏电站影响因素及发电量分析验证方法的探讨 柯学进Document4 pages光伏电站影响因素及发电量分析验证方法的探讨 柯学进jameskingiswell100% (1)
- 一維駐波與二維共振的克拉尼圖案結報Document5 pages一維駐波與二維共振的克拉尼圖案結報曾健宇No ratings yet
- Lingjie Qin* 计算机与信息工程学院 中南林业科技大学 中国长沙 Yizheng Chen 数理科学学院 湖南文理学院 Changde, ChinaDocument6 pagesLingjie Qin* 计算机与信息工程学院 中南林业科技大学 中国长沙 Yizheng Chen 数理科学学院 湖南文理学院 Changde, China363331272No ratings yet
- α 和 β,有以下公式: cos(α − β)= cosα cosβ + sinα sinβ。Document7 pagesα 和 β,有以下公式: cos(α − β)= cosα cosβ + sinα sinβ。ann96619No ratings yet
- CQC-TUV-SUD-Battery CableDocument27 pagesCQC-TUV-SUD-Battery CableVin WangNo ratings yet
- 搞懂锂电池阻抗谱 (EIS) 不容易,这篇综述值得一看! 手机搜狐网Document2 pages搞懂锂电池阻抗谱 (EIS) 不容易,这篇综述值得一看! 手机搜狐网iamwcnNo ratings yet
- 7.4 刚体定轴转动的动能和动能定理Document34 pages7.4 刚体定轴转动的动能和动能定理KennethNo ratings yet
- 天体的旋进与角动量守恒 于凤军Document4 pages天体的旋进与角动量守恒 于凤军吕伟知No ratings yet
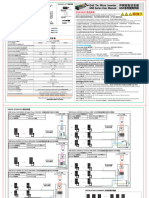
- Grid Tie Micro Inverter GMI Series User Manual 并 网 微 型 逆 变 器 GMI系列使用手册Document2 pagesGrid Tie Micro Inverter GMI Series User Manual 并 网 微 型 逆 变 器 GMI系列使用手册stypy85kw8No ratings yet
- FB 230504091907Document58 pagesFB 230504091907點潔No ratings yet