You might also like
- Yamaha XV250 Services ManualDocument291 pagesYamaha XV250 Services Manualalitkeren92% (26)
- Adaptive Cruise Control' (ACC)Document30 pagesAdaptive Cruise Control' (ACC)rahulkmar100% (3)
- GH60RS RSVRST Procedures MAR 15.pptversion 2Document103 pagesGH60RS RSVRST Procedures MAR 15.pptversion 2Ionut TanaseNo ratings yet
- Deutz DX 230, DX 250 (1982)Document12 pagesDeutz DX 230, DX 250 (1982)Ivica Broz100% (1)
- 72 OWNERS MANUAL - WD250U-L - Wilderness Trail 250cc ATV Owners Manual Canadian Model VIN Prefix LLCLDocument82 pages72 OWNERS MANUAL - WD250U-L - Wilderness Trail 250cc ATV Owners Manual Canadian Model VIN Prefix LLCLAgustin RodriguezNo ratings yet
- Sino Truck HowoDocument2 pagesSino Truck HowoLavern P. SipinNo ratings yet
- Tacaldo Learning Module NAV 5 - Operational Use of RADAR - ARPA LO No. 2.10 LO No. 2.112Document12 pagesTacaldo Learning Module NAV 5 - Operational Use of RADAR - ARPA LO No. 2.10 LO No. 2.112Frednixen Bustamante Gapoy100% (1)
- System Overview of Junction Box Electronics - E90, E91, E92, E93Document4 pagesSystem Overview of Junction Box Electronics - E90, E91, E92, E93alrahij8No ratings yet
- ARPA HandoutsDocument35 pagesARPA HandoutsRangaraj Kathiresan100% (4)
- #1 ARacer RC Super X IntroductionDocument63 pages#1 ARacer RC Super X Introductionmida0114100% (2)
- The Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyDocument58 pagesThe Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyMoh. Ali FauziNo ratings yet
- Adaptive Cruise ControlDocument20 pagesAdaptive Cruise ControlMohammad ThanzimNo ratings yet
- Ellamp Group&AP Bus and Coach 2022Document40 pagesEllamp Group&AP Bus and Coach 2022Alexis AlfingerNo ratings yet
- ADAS Solutions: Radar and Camera Calibration For Advanced Driver Assistance SystemsDocument16 pagesADAS Solutions: Radar and Camera Calibration For Advanced Driver Assistance SystemsJerzy OzNo ratings yet
- (Public) Intelligent Traffic System V20210330Document94 pages(Public) Intelligent Traffic System V20210330MA GonzalezNo ratings yet
- SSP 999303 Audi A8l ElectricalDocument91 pagesSSP 999303 Audi A8l Electricalylk1No ratings yet
- MF 400xtra Spec-EnDocument14 pagesMF 400xtra Spec-Enwaqasenquiring4298No ratings yet
- Adaptive Cruise Control SystemDocument20 pagesAdaptive Cruise Control SystemRajesh KumarNo ratings yet
- 15 Cab-N900 Series JMCDocument42 pages15 Cab-N900 Series JMCRusonegro100% (1)
- Speed CamerasDocument25 pagesSpeed CamerasSwati Sri25% (4)
- CameraDocument25 pagesCameraAnonymous ty7mAZNo ratings yet
- Autonomous Vehicle and Real Time Road Lanes Detection and TrackingDocument7 pagesAutonomous Vehicle and Real Time Road Lanes Detection and Trackingchahinez abdellaouiNo ratings yet
- Tesis de RC CarDocument36 pagesTesis de RC CarCarlos Baldwind RodriguezNo ratings yet
- Literature SurveyDocument8 pagesLiterature SurveyTejaswi k kNo ratings yet
- Driver Safety Awareness and Assistance SDocument6 pagesDriver Safety Awareness and Assistance SArvin Dexter De CastroNo ratings yet
- Cruise Control DeviceDocument21 pagesCruise Control DevicekoolboyankitNo ratings yet
- Parking AidDocument30 pagesParking AidCarlos VelázquezNo ratings yet
- Simultaneous Localization and MappingDocument66 pagesSimultaneous Localization and Mappingsivani05No ratings yet
- QraDocument7 pagesQramanishNo ratings yet
- 2022 HeadformsDocument2 pages2022 Headformsachrafkaniki11No ratings yet
- Elite Troops Program Entrance & Exit Introduction: Hunter Ye/ Sep, 2021Document57 pagesElite Troops Program Entrance & Exit Introduction: Hunter Ye/ Sep, 2021Ricardo HolleroNo ratings yet
- Montaje Camara Xc60Document10 pagesMontaje Camara Xc60juanagus_20No ratings yet
- Les Véhicules Autonomes: Stéphane FERON: Expert Nterface Homme MachineDocument31 pagesLes Véhicules Autonomes: Stéphane FERON: Expert Nterface Homme MachinekrommNo ratings yet
- MC 10214088 9999Document5 pagesMC 10214088 9999Levani ChubinidzeNo ratings yet
- Prospekt ADAS v10Document16 pagesProspekt ADAS v10Dragan SimovicNo ratings yet
- This Study Resource Was Shared Via: Title Submission: Sept 25 (Next Week) Presentations: Oct 2 (Next AI Class)Document5 pagesThis Study Resource Was Shared Via: Title Submission: Sept 25 (Next Week) Presentations: Oct 2 (Next AI Class)Saad khalilNo ratings yet
- VE Commercial ProjectDocument25 pagesVE Commercial ProjectKunwar ShaileshNo ratings yet
- Automated Cam Profile Designer and OptimizerDocument15 pagesAutomated Cam Profile Designer and OptimizerkaesarNo ratings yet
- FP FINAL-converted (2) - Converted (2) - Converted-MergedDocument22 pagesFP FINAL-converted (2) - Converted (2) - Converted-MergedAbdullah Raghib SiddiquiNo ratings yet
- Automatic Fuel Fire Controller: Compiled by Guided by Supervised byDocument24 pagesAutomatic Fuel Fire Controller: Compiled by Guided by Supervised byKunwar ShaileshNo ratings yet
- Self Driving VehicleDocument26 pagesSelf Driving VehicleMohamed AnushNo ratings yet
- NSVC 2019Document9 pagesNSVC 2019RoronoaNo ratings yet
- 1-Intro DP TechnDocument60 pages1-Intro DP TechnAllen AnyayahanNo ratings yet
- Adaptive Cruise Control System: Department of Civil Engineering, BJI, Kollam 1Document24 pagesAdaptive Cruise Control System: Department of Civil Engineering, BJI, Kollam 1Bhagee KpNo ratings yet
- Charvat MIT Haystack DIY SARDocument19 pagesCharvat MIT Haystack DIY SARpaulo21No ratings yet
- Black Box For Vehicles: Project Reference No.:39S - Be - 1071Document3 pagesBlack Box For Vehicles: Project Reference No.:39S - Be - 1071raviNo ratings yet
- Checkpoint System: Center Mounting Side MountingDocument20 pagesCheckpoint System: Center Mounting Side MountingMA GonzalezNo ratings yet
- UntitledDocument18 pagesUntitledAkhil RajuNo ratings yet
- APM 2.5 Arducopter Guide v1.4Document10 pagesAPM 2.5 Arducopter Guide v1.4Wahyudin LuthfiNo ratings yet
- 9 측후방 장애물 인식 시스템Document33 pages9 측후방 장애물 인식 시스템smsnvhNo ratings yet
- The Intelligent Embedded Control Warning System For Car ReversingDocument3 pagesThe Intelligent Embedded Control Warning System For Car ReversingShashi KanthNo ratings yet
- Continue: Adaptive Cruise Control System Seminar Report PDFDocument2 pagesContinue: Adaptive Cruise Control System Seminar Report PDFKnightmare 007No ratings yet
- Development of Lane Keeping Assist System: Jaehee Kim, Hyundai-Kia MotorsDocument10 pagesDevelopment of Lane Keeping Assist System: Jaehee Kim, Hyundai-Kia MotorstrisinoNo ratings yet
- E&E Part IDocument52 pagesE&E Part IRicardo HolleroNo ratings yet
- Silo - Tips - Automatic Tracking AidDocument20 pagesSilo - Tips - Automatic Tracking AidBekti PurbowoNo ratings yet
- Autonomous Vehicle: Department of Computer Science and EngineeringDocument23 pagesAutonomous Vehicle: Department of Computer Science and EngineeringShivanshu PathakNo ratings yet
- Adaptive CruiseDocument15 pagesAdaptive CruisemaheshfbNo ratings yet
- Project ProposalDocument2 pagesProject Proposalzetix1No ratings yet
- Autosens - Tutorial - Autonomous Driving With ROSDocument58 pagesAutosens - Tutorial - Autonomous Driving With ROSjfrasconNo ratings yet
- 1 s2.0 S0888327022003193 MainDocument21 pages1 s2.0 S0888327022003193 Mainsamsaptak ghoshNo ratings yet
- Automotive Radar in EnglishDocument58 pagesAutomotive Radar in EnglishAstro sohaibNo ratings yet
- Shah Bahrami 2017Document6 pagesShah Bahrami 2017carlos olivaNo ratings yet
- User Manual: KINGSLIM DL12 Pro Dual Dash CamDocument36 pagesUser Manual: KINGSLIM DL12 Pro Dual Dash Cammexicolindo0623No ratings yet
- BerlitzDocument1 pageBerlitzChowder'sNo ratings yet
- Access & Parking Product PromotionDocument30 pagesAccess & Parking Product Promotionxmaster2007No ratings yet
- Unmanned Ground Combat Vehicle: AbstractDocument5 pagesUnmanned Ground Combat Vehicle: AbstractBj BaJwaNo ratings yet
- Automatic Number Plate Recognition: Fundamentals and ApplicationsFrom EverandAutomatic Number Plate Recognition: Fundamentals and ApplicationsNo ratings yet
- Automatic Number Plate Recognition: Unlocking the Potential of Computer Vision TechnologyFrom EverandAutomatic Number Plate Recognition: Unlocking the Potential of Computer Vision TechnologyNo ratings yet
- 6.Radar-Vision Fusion For Object ClassificationDocument7 pages6.Radar-Vision Fusion For Object ClassificationThanh LeNo ratings yet
- 4.data Fusion of Radar and Image Measurements For Multi-Object Tracking Via Kalman FilteringDocument26 pages4.data Fusion of Radar and Image Measurements For Multi-Object Tracking Via Kalman FilteringThanh LeNo ratings yet
- 5.sensor Fusion For Vehicle Tracking With Camera and Radar SensorDocument4 pages5.sensor Fusion For Vehicle Tracking With Camera and Radar SensorThanh LeNo ratings yet
- 16.fusion of Millimeter Wave Radar and RGB-Depth Sensors For AssistedDocument8 pages16.fusion of Millimeter Wave Radar and RGB-Depth Sensors For AssistedThanh LeNo ratings yet
- 17.object Detection and Tracking With Side CamerasDocument120 pages17.object Detection and Tracking With Side CamerasThanh LeNo ratings yet
- Pureway Automobile IndustryDocument123 pagesPureway Automobile IndustryjacabNo ratings yet
- Unit-Iv Steering SystemDocument20 pagesUnit-Iv Steering SystemMark MubiruNo ratings yet
- RS-RV Brochure ENDocument20 pagesRS-RV Brochure ENBlytzx GamesNo ratings yet
- GoRhino Jeep 2019 LOWDocument72 pagesGoRhino Jeep 2019 LOWDavidNo ratings yet
- SPR Enbine Valve CatalogueDocument138 pagesSPR Enbine Valve CatalogueJoão Koiti InoueNo ratings yet
- TATA Motors - Starbuses Strategic Analysis - MBA Summer Training Project Report PDF DownloadDocument73 pagesTATA Motors - Starbuses Strategic Analysis - MBA Summer Training Project Report PDF DownloadZAFAR AHSAN ADILNo ratings yet
- Tyre Size To Rim Size Compatibility Guide: Information SheetDocument7 pagesTyre Size To Rim Size Compatibility Guide: Information SheetRobNo ratings yet
- 2024 Mustang Technical SpecificationsDocument3 pages2024 Mustang Technical SpecificationsJeffreyNo ratings yet
- T7 Range: T7.175 T7.190 T7.210 T7.225Document34 pagesT7 Range: T7.175 T7.190 T7.210 T7.225Francisco SilvaNo ratings yet
- Load 69738907Document4 pagesLoad 69738907PolaroidNo ratings yet
- 5 Gaikindo Production Data Jandec2019 DikonversiDocument3 pages5 Gaikindo Production Data Jandec2019 DikonversidinaNo ratings yet
- Information Labels Information Labels: PDF Processed With Cutepdf Evaluation EditionDocument115 pagesInformation Labels Information Labels: PDF Processed With Cutepdf Evaluation EditionDominique PaniNo ratings yet
- RT - Rte Steel Leaf Spring Rear SuspensionDocument80 pagesRT - Rte Steel Leaf Spring Rear SuspensionIvan LeeNo ratings yet
- Soal 1 Latihan Pat LM TP 22-23Document5 pagesSoal 1 Latihan Pat LM TP 22-23Dominicus Felix 1956011No ratings yet
- 1999 DMRDocument1 page1999 DMRVivek VikramNo ratings yet
- 2023 Nissan Pathfinder Brochure enDocument9 pages2023 Nissan Pathfinder Brochure enoswaldcameronNo ratings yet
- Water Pump App CatalogueDocument130 pagesWater Pump App Catalogueالاتحاد العربي للاعمال المعدنيةNo ratings yet
- T SB 0305 08.PDF RevisedDocument18 pagesT SB 0305 08.PDF Revisedgoomba100% (1)
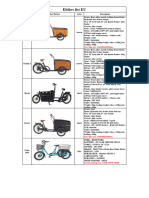
- Ebikes ListDocument2 pagesEbikes ListWU POLLYNo ratings yet
- Product Comparison - Segway-Ninebot - APACDocument13 pagesProduct Comparison - Segway-Ninebot - APACProject HobiNo ratings yet
- 00 53 06 0223-Cruzetas-FEV-2018Document39 pages00 53 06 0223-Cruzetas-FEV-2018ALEXANDRE F VOLTANo ratings yet
- Freightliner Business Class Trucks Maintenance Manual Cd1Document10 pagesFreightliner Business Class Trucks Maintenance Manual Cd1dennis100% (50)