You might also like
- The McKinsey Engagement SummaryDocument82 pagesThe McKinsey Engagement Summaryjmaulana731093% (15)
- Cl-9 E. Lang B, Term-1, Week-1, Student Book, PG 4-12, 27-29 July 21, Sub 13.06.21Document9 pagesCl-9 E. Lang B, Term-1, Week-1, Student Book, PG 4-12, 27-29 July 21, Sub 13.06.218C-Ahmed Musawwir - Dj067No ratings yet
- Ma Education-4th-Engl2115-16-16 PDFDocument39 pagesMa Education-4th-Engl2115-16-16 PDFSameera ZahidNo ratings yet
- Do Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StanceDocument3 pagesDo Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StancenonononowayNo ratings yet
- Artificial Intelligence Syllabus (2 Hr./week) : Course Schedule Weeks Subject Sub-SubjectsDocument2 pagesArtificial Intelligence Syllabus (2 Hr./week) : Course Schedule Weeks Subject Sub-SubjectsGoran WnisNo ratings yet
- Esc5517 2 Introduction 2015Document10 pagesEsc5517 2 Introduction 2015Ikhwan AlifNo ratings yet
- Marketing Quality CircleDocument18 pagesMarketing Quality CircleAbubakarNo ratings yet
- ATL Presentation at To StaffDocument42 pagesATL Presentation at To StaffoscarbecNo ratings yet
- Induction SylabusDocument1 pageInduction SylabusWahyu Aditya DharmaNo ratings yet
- 11 - Practical ResearchDocument10 pages11 - Practical Researchcabstephanie31No ratings yet
- Session 9 - Consumer Decision Making (ContDocument6 pagesSession 9 - Consumer Decision Making (ContMunch MuchNo ratings yet
- Idea GenerationDocument5 pagesIdea Generationapi-3698788No ratings yet
- Sem2prelim ResearchDocument4 pagesSem2prelim ResearchMichael QuidorNo ratings yet
- WisecurriculumDocument12 pagesWisecurriculumapi-372710779No ratings yet
- Syllabus Idi 3,4 Morningsisem22Document5 pagesSyllabus Idi 3,4 Morningsisem22marlenepazNo ratings yet
- COMP219: Artificial Intelligence: Lecture 7: Search StrategiesDocument9 pagesCOMP219: Artificial Intelligence: Lecture 7: Search Strategiesislam vedioNo ratings yet
- DTO Visual Summary Double Diamond SummaryDocument1 pageDTO Visual Summary Double Diamond SummaryPaulo Armi100% (1)
- Planning Grid Leaving Cert DCG MR BolandDocument5 pagesPlanning Grid Leaving Cert DCG MR Bolandapi-488464617No ratings yet
- BSN3 Nursing Research Lec No. 3 Types of ResearchDocument3 pagesBSN3 Nursing Research Lec No. 3 Types of ResearchAnabelle Rico0% (1)
- Qualitative ResearchDocument9 pagesQualitative ResearchPrincess Denice OrtalezaNo ratings yet
- Knowledge, Skills & Attributes: Maritime Human ResourcesDocument1 pageKnowledge, Skills & Attributes: Maritime Human Resources757rustamNo ratings yet
- HelooooDocument1 pageHelooooiiSxllyGirlNo ratings yet
- 3 Elements of Thought 1Document33 pages3 Elements of Thought 1claudiaqfNo ratings yet
- Soft Vs Hard ClusteringDocument5 pagesSoft Vs Hard ClusteringApoorva SinghNo ratings yet
- Intermediate Intermediate Grades Grades G R A D E S 4, 5, 6 G R A D E S 4, 5, 6Document1 pageIntermediate Intermediate Grades Grades G R A D E S 4, 5, 6 G R A D E S 4, 5, 6Dreamy PayumoNo ratings yet
- RESEARCH DESIGN - PHDDocument32 pagesRESEARCH DESIGN - PHDjha.bhaskar.krNo ratings yet
- Methods of Data CollectionDocument2 pagesMethods of Data CollectionRajju RajjuNo ratings yet
- Research Basics: STEP 1: Initiate - Brainstorm STEP 2: Locate - Research ProcessDocument1 pageResearch Basics: STEP 1: Initiate - Brainstorm STEP 2: Locate - Research ProcessDayna JacksonNo ratings yet
- GANAG Blended Lesson GuideDocument1 pageGANAG Blended Lesson GuideJose Gregorio VargasNo ratings yet
- Case StudyDocument26 pagesCase StudyMadhura BhoyarNo ratings yet
- INTELLIGENCE THEORY and WICS MODELDocument12 pagesINTELLIGENCE THEORY and WICS MODELEst LijNo ratings yet
- Research DesignDocument9 pagesResearch Designramzi aidliNo ratings yet
- ComAct1 PDFDocument1 pageComAct1 PDFGurjar DevyaniNo ratings yet
- Chapter 10Document34 pagesChapter 10DivyaNo ratings yet
- Interview Preparation Workshop: February 18, 2003Document18 pagesInterview Preparation Workshop: February 18, 2003Paritosh ShahNo ratings yet
- Kuliah SamplingDesignDocument85 pagesKuliah SamplingDesignHanli WijayaNo ratings yet
- Finding and Formulating Your Topic: Chapter ConceptsDocument41 pagesFinding and Formulating Your Topic: Chapter Conceptssamson wmariamNo ratings yet
- Chapter 2 Old Data Collection Approach in Developmental PsychologyDocument7 pagesChapter 2 Old Data Collection Approach in Developmental PsychologyMD. SAKIBUR RAHMANNo ratings yet
- Summary of Last Chapter: Principles of Knowledge Discovery in DatabasesDocument8 pagesSummary of Last Chapter: Principles of Knowledge Discovery in DatabasesNyma AlamgirNo ratings yet
- 02 Consumer ResearchDocument9 pages02 Consumer ResearchAyush ShrivastavaNo ratings yet
- KEN2570-5-Search and IRDocument18 pagesKEN2570-5-Search and IRGibi GibiNo ratings yet
- Basic ConceptDocument1 pageBasic ConceptGlenn Famorcan FadrilanNo ratings yet
- Data Collection & SamplingDocument56 pagesData Collection & SamplingNugraha Eka SaputraNo ratings yet
- KM Architecture at InfosysDocument15 pagesKM Architecture at Infosysvermasaumya87No ratings yet
- Materi 2 Riset KonsumenDocument22 pagesMateri 2 Riset KonsumenVellaNo ratings yet
- Top Notch 1 2E SS PDFDocument2 pagesTop Notch 1 2E SS PDFGerardo OchoaNo ratings yet
- Learning: Deductive ReasoningDocument16 pagesLearning: Deductive ReasoningBhanu DwivediNo ratings yet
- Introduction To PBLDocument21 pagesIntroduction To PBLChipego NyirendaNo ratings yet
- Agenda 9Document1 pageAgenda 9api-187100651No ratings yet
- The Scientific Investigation of Phenomena: ResearchDocument3 pagesThe Scientific Investigation of Phenomena: ResearchlibbyNo ratings yet
- Personality Test ResultDocument3 pagesPersonality Test Resultapi-538653350No ratings yet
- Research Research Methodologies Methodologies: Assignment 2 Assignment 2 Qualitative Research Qualitative ResearchDocument4 pagesResearch Research Methodologies Methodologies: Assignment 2 Assignment 2 Qualitative Research Qualitative ResearchMuhammad Amin BangashNo ratings yet
- Jimenez - LJ Graphic OrganizerDocument4 pagesJimenez - LJ Graphic OrganizerLJ DolosaNo ratings yet
- Revised Bloom+s Taxonomy Action VerbsDocument1 pageRevised Bloom+s Taxonomy Action VerbsKiran DamaNo ratings yet
- Revised Blooms Taxonomy Action VerbsDocument1 pageRevised Blooms Taxonomy Action VerbsPettia WilliamsNo ratings yet
- App - Tracking - Sheet. EvaluacijaDocument1 pageApp - Tracking - Sheet. EvaluacijaTanja Jandreska - SimonovaNo ratings yet
- UKM Quantitative and Qualitative Research DesignDocument56 pagesUKM Quantitative and Qualitative Research DesignGhazala Haider100% (1)
- Lesson GuideDocument1 pageLesson Guideergu2000No ratings yet
- Chap 02-The Key To Be Successful at UniversityDocument24 pagesChap 02-The Key To Be Successful at UniversityNguyễn VĩnhÝNo ratings yet
- Statistics For Business and EconomicsDocument19 pagesStatistics For Business and EconomicsSai MeenaNo ratings yet
- Maharishi Sadasiva Isham-AscensionDocument125 pagesMaharishi Sadasiva Isham-AscensionCristian Catalina100% (2)
- Performance Comparison of Simulated Annealing GA and ACO Applied To TSPDocument8 pagesPerformance Comparison of Simulated Annealing GA and ACO Applied To TSPSaurav AcharyaNo ratings yet
- As Sci 10 SLG Week 5 Quarter IiDocument6 pagesAs Sci 10 SLG Week 5 Quarter IiDarwin BondocNo ratings yet
- Boolean Algebra Part 2Document10 pagesBoolean Algebra Part 2Md. Masum Latif Chowdhury (201016006)No ratings yet
- Detailed Lesson Plan In: ENGLISH For Grades 7 (Quarter 1-Week 1-SY 2020-2021)Document5 pagesDetailed Lesson Plan In: ENGLISH For Grades 7 (Quarter 1-Week 1-SY 2020-2021)bwahahaNo ratings yet
- GRIHA EDS Feasibility ChecklistDocument7 pagesGRIHA EDS Feasibility ChecklistNikunj DwivediNo ratings yet
- Dgms AvaDocument3 pagesDgms AvaVinod GuptaNo ratings yet
- 28-11-21 - JR - Iit - Star Co-Sc (Model-A) - Jee Adv - 2015 (P-I) - Wat-29 - Key & SolDocument8 pages28-11-21 - JR - Iit - Star Co-Sc (Model-A) - Jee Adv - 2015 (P-I) - Wat-29 - Key & SolasdfNo ratings yet
- UniAmericas PASSIVATION - SOLUTION MSDSDocument3 pagesUniAmericas PASSIVATION - SOLUTION MSDSVivian FrancisNo ratings yet
- Monitoring and Evaluation On School ReadinessDocument3 pagesMonitoring and Evaluation On School ReadinessArlene TubanNo ratings yet
- Report Group 1Document67 pagesReport Group 11706112No ratings yet
- Final Verbal Agression ResearchDocument26 pagesFinal Verbal Agression ResearchLucañas PhilipNo ratings yet
- RFQ 10406475 - RWSCM00015F-Rev05-RequestforQuotationSupplyandDelivery - 20230929112300.955 - X 23 October 2023TDocument11 pagesRFQ 10406475 - RWSCM00015F-Rev05-RequestforQuotationSupplyandDelivery - 20230929112300.955 - X 23 October 2023TPfunzo MammbaNo ratings yet
- One-Day Workshop Brochure - KHP - 10.02.2022Document1 pageOne-Day Workshop Brochure - KHP - 10.02.2022Ramya RajeshNo ratings yet
- Top Renewable Energy Trends of 2018: Madeleine HoweDocument4 pagesTop Renewable Energy Trends of 2018: Madeleine HowedubryNo ratings yet
- Mobatec Modeller Intorduction Course Tutorial IDocument10 pagesMobatec Modeller Intorduction Course Tutorial IMohammad Yasser RamzanNo ratings yet
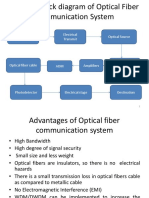
- Source of Information Electrical Transmit Optical SourceDocument37 pagesSource of Information Electrical Transmit Optical SourcesubashNo ratings yet
- 2 - Basic Theories of Gender PsychologyDocument20 pages2 - Basic Theories of Gender Psychologyergün ErgünNo ratings yet
- PBL Final ReportDocument4 pagesPBL Final ReportChester Dave Bal-otNo ratings yet
- 3 (Diffusivity of Gases)Document52 pages3 (Diffusivity of Gases)Nasir ShamsNo ratings yet
- A Study On Five International Scientists: Micro Project ReportDocument18 pagesA Study On Five International Scientists: Micro Project ReportAishwarya MohanNo ratings yet
- Application of Modern Technology For Fault Diagnosis in Power Transformers Energy ManagementDocument6 pagesApplication of Modern Technology For Fault Diagnosis in Power Transformers Energy ManagementCamila Caceres FloresNo ratings yet
- Allama Iqbal Open University, Islamabad: WarningDocument3 pagesAllama Iqbal Open University, Islamabad: Warningمحمد کاشفNo ratings yet
- Chapter 9Document22 pagesChapter 9Marjorie Anne VilledoNo ratings yet
- Math Makes Sense Practice and Homework Book Grade 5 AnswersDocument8 pagesMath Makes Sense Practice and Homework Book Grade 5 Answerseh041zef100% (1)
- Magic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilityDocument19 pagesMagic Arrays - Multichannel Microphone Array Design Applied To Microphone Arrays Generating Interformat CompatabilitymewarulesNo ratings yet