You might also like
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument1 pageHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument10 pagesHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- Folmula SheetDocument6 pagesFolmula SheetMariam MahmoudNo ratings yet
- Unit 3 - Step 4Document17 pagesUnit 3 - Step 4orlando cartagena100% (1)
- 3.2 Monochromatic Plane WavesDocument3 pages3.2 Monochromatic Plane Wavesmuhammadnaeem4957No ratings yet
- Steady State ErrorDocument4 pagesSteady State ErrorAhmed KhaledNo ratings yet
- The First Fundamental Theorem of Calculus Second Fundamental Theorem of CalculusDocument7 pagesThe First Fundamental Theorem of Calculus Second Fundamental Theorem of Calculuskierby sanbagrielNo ratings yet
- 𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αDocument4 pages𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αdrissboum1bacNo ratings yet
- Differential Calculus (Of FunctionDocument7 pagesDifferential Calculus (Of FunctionTanglaysun N SangmaNo ratings yet
- شيت القوانينDocument2 pagesشيت القوانينRuqaya MohammedNo ratings yet
- Basilius 5.0Document3 pagesBasilius 5.0Piero yosip Basilio AylasNo ratings yet
- Design Optimization (ME41613) + Engineering Design Optimization (ME60079)Document21 pagesDesign Optimization (ME41613) + Engineering Design Optimization (ME60079)HarishNandanNo ratings yet
- Formulario de Funciones MatematicasDocument2 pagesFormulario de Funciones MatematicasJUAN SALVADOR LARA CAMACHONo ratings yet
- Formula Sheet: Types of MaterialDocument3 pagesFormula Sheet: Types of MaterialdaraNo ratings yet
- Electric Flux Density, Gauss Law, Divergence PDFDocument35 pagesElectric Flux Density, Gauss Law, Divergence PDFSubhan MansoorNo ratings yet
- SDMF Formula RevisedDocument1 pageSDMF Formula RevisedG MdNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- First Order Circuits - RC and RLDocument22 pagesFirst Order Circuits - RC and RLTyspoNo ratings yet
- 1819 Formula Sheet 1 (Chemical Equilibria) (EN)Document2 pages1819 Formula Sheet 1 (Chemical Equilibria) (EN)Nathasha MncubeNo ratings yet
- Formulas Primer Momento 2023-IDocument6 pagesFormulas Primer Momento 2023-IYair Oquendo PNo ratings yet
- Laplace PPTDocument172 pagesLaplace PPTRama ThombareNo ratings yet
- Formulario de FísicaDocument2 pagesFormulario de FísicaMayen Hernandez OsvaldoNo ratings yet
- Comb2 Formulario 2018-2Document2 pagesComb2 Formulario 2018-2J OS A MPNo ratings yet
- 18 Integration TechniquesDocument18 pages18 Integration Techniquesأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- Formula Sheet FE - W21Document3 pagesFormula Sheet FE - W21debbyNo ratings yet
- Class7 - Energy MethodDocument46 pagesClass7 - Energy MethodAlvinNo ratings yet
- Rate Limiting StepDocument4 pagesRate Limiting Stepanak tengikNo ratings yet
- Formulario de Principales Relaciones Geométricas en EngranesDocument2 pagesFormulario de Principales Relaciones Geométricas en EngranesLuis Eduardo Rodriguez GarrafaNo ratings yet
- PhysiqueDocument3 pagesPhysiqueErone DougassaNo ratings yet
- Physics 141 Equation Sheet-Knight 4 EdDocument1 pagePhysics 141 Equation Sheet-Knight 4 EdSimon SituNo ratings yet
- 5.a Input and Transfer ImpedanceDocument6 pages5.a Input and Transfer ImpedanceSaravanan ManavalanNo ratings yet
- IM BrakingDocument10 pagesIM BrakingABCNo ratings yet
- CalculusDocument16 pagesCalculusapi-662361166No ratings yet
- HE Lecture 5 PDFDocument13 pagesHE Lecture 5 PDFpresidentisc nit-rourkelaNo ratings yet
- EMT Short NotesDocument11 pagesEMT Short Notesshahswat mallickNo ratings yet
- Formulario para ImprimirDocument3 pagesFormulario para Imprimirramirezmariadelrosario340No ratings yet
- Formulario para ImprimirDocument3 pagesFormulario para Imprimirramirezmariadelrosario340No ratings yet
- Sem. 3, M - 301, Unit 2Document23 pagesSem. 3, M - 301, Unit 2Pinal PatelNo ratings yet
- 19 09 VariationalFormulationDocument12 pages19 09 VariationalFormulationatharva.betawadkarNo ratings yet
- Studying Production and Trade Through An Input-Output Analysis FrameworkDocument2 pagesStudying Production and Trade Through An Input-Output Analysis FrameworkNina Dela CruzNo ratings yet
- T-Ecet210lec HW4 SumayaDocument2 pagesT-Ecet210lec HW4 SumayaMigsNo ratings yet
- Taller Señales y SistemasDocument12 pagesTaller Señales y SistemasHarold Darian Barrera ChaparroNo ratings yet
- Chapter 3 Assignment Part IIDocument5 pagesChapter 3 Assignment Part IISaifullah ImranNo ratings yet
- Zapata ConectadaDocument15 pagesZapata ConectadaGuillermo Yalico LazaroNo ratings yet
- Ecuación de AntoineDocument2 pagesEcuación de AntoineValentina MenesesNo ratings yet
- Reglas Básicas de Derivación e IntegraciónDocument2 pagesReglas Básicas de Derivación e Integraciónduvan petrohernandezNo ratings yet
- Midpoint: Vector Between Two PointsDocument3 pagesMidpoint: Vector Between Two Pointsali alkassemNo ratings yet
- 7 IntegrationDocument7 pages7 Integrationأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- قواعد التكامل PDFDocument4 pagesقواعد التكامل PDFريانNo ratings yet
- FormulasDocument2 pagesFormulasRyan MamawagNo ratings yet
- Chapter 3 Propeller TheoryDocument37 pagesChapter 3 Propeller TheorytvkbhanuprakashNo ratings yet
- Hoja de Fórmulas para El ParcialDocument1 pageHoja de Fórmulas para El ParcialSabrina Celeste ImpróvolaNo ratings yet
- 2021 Energy Conversion-Chapter 3-2-2Document15 pages2021 Energy Conversion-Chapter 3-2-2김동현No ratings yet
- Integration ConceptDocument34 pagesIntegration ConceptJANELLA ALVAREZNo ratings yet
- DR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesDocument4 pagesDR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesIsmael hijaziNo ratings yet
- Ángulos NotablesDocument2 pagesÁngulos NotablesSALOMON LOPEZ APAZANo ratings yet
- Form 1 Vectores Mat 1102Document2 pagesForm 1 Vectores Mat 1102javier colque sacaNo ratings yet
- 5 Theorems On Probability of EventsDocument3 pages5 Theorems On Probability of EventsKavi SanjaiNo ratings yet
- Microprocessor - 8086 Functional UnitsDocument3 pagesMicroprocessor - 8086 Functional UnitsKavi SanjaiNo ratings yet
- Linear Integrated Circuits by D Roy ChowdaryDocument440 pagesLinear Integrated Circuits by D Roy ChowdaryKavi SanjaiNo ratings yet
- Implementation of Stacks Using ArrayDocument5 pagesImplementation of Stacks Using ArrayKavi SanjaiNo ratings yet
- 22LBS408 Assignment 1Document2 pages22LBS408 Assignment 1Kavi SanjaiNo ratings yet
- Gamma DistributionDocument4 pagesGamma DistributionKavi SanjaiNo ratings yet
- Rohini 73368788324Document5 pagesRohini 73368788324Kavi SanjaiNo ratings yet
- Guideunit 5Document5 pagesGuideunit 5Kavi SanjaiNo ratings yet
- Pavi Ds 1 BDocument10 pagesPavi Ds 1 BKavi SanjaiNo ratings yet
- Flow ChartDocument7 pagesFlow ChartKavi SanjaiNo ratings yet
- Electronic 17Document12 pagesElectronic 17Kavi SanjaiNo ratings yet
- Mechanical Engineering Dynamics of Machines Balancing of Rotating Masses NotesDocument46 pagesMechanical Engineering Dynamics of Machines Balancing of Rotating Masses NotesRajibNo ratings yet
- 3 Problems Vectors Force SystemsDocument37 pages3 Problems Vectors Force Systemsmsi appleNo ratings yet
- XI PowerlessDocument4 pagesXI Powerlessfato.imran99No ratings yet
- AY 2022 Sem 2 A107 L01 Lecture Notes (Lecturer)Document53 pagesAY 2022 Sem 2 A107 L01 Lecture Notes (Lecturer)Lim Liang XuanNo ratings yet
- IAL FP3 June 2019 Mark Scheme PDFDocument28 pagesIAL FP3 June 2019 Mark Scheme PDFJohn JohnsonNo ratings yet
- 2K MethodDocument5 pages2K MethodLind D. QuiNo ratings yet
- Static Equilibrium - Student WorksheetDocument8 pagesStatic Equilibrium - Student Worksheetdave0828No ratings yet
- Review of Vector CalculusDocument53 pagesReview of Vector CalculusAhmed TayehNo ratings yet
- FE Math 2022Document11 pagesFE Math 2022Kyle CasanguanNo ratings yet
- Week 1: Learning Activity 1 Short Quiz 1Document39 pagesWeek 1: Learning Activity 1 Short Quiz 1yagami100% (1)
- 29Document10 pages29physicsdocsNo ratings yet
- (Michael E Mortenson) Mathematics For Computer Gra PDFDocument368 pages(Michael E Mortenson) Mathematics For Computer Gra PDFshaunakNo ratings yet
- Some Remark On GPS Ambiguity ResolutionDocument8 pagesSome Remark On GPS Ambiguity Resolutionwan866No ratings yet
- Caie A2 Maths 9709 Pure 3Document19 pagesCaie A2 Maths 9709 Pure 3Nat Gari100% (2)
- Fundamentals of Electromagnetics With MatlabDocument699 pagesFundamentals of Electromagnetics With MatlabAhmed S AlAmeri100% (4)
- Module Checklist - Mechanics - Grade 12Document7 pagesModule Checklist - Mechanics - Grade 12api-257324866No ratings yet
- Chapter 2Document10 pagesChapter 2abdul azizNo ratings yet
- Reading Motion MapsDocument3 pagesReading Motion MapsChrysler Hans GuttenbergNo ratings yet
- Module 2 - Electromagnetic WavesDocument17 pagesModule 2 - Electromagnetic WavesMahek KhushalaniNo ratings yet
- Star CCM ProblemDocument24 pagesStar CCM Problemgameison89No ratings yet
- Part 1 KinematicsDocument163 pagesPart 1 KinematicsArmando Valentin RodriguezNo ratings yet
- Phy 101 - FirstDocument73 pagesPhy 101 - FirstShaimaa HawadiNo ratings yet
- Class XI PHYSICS - Class Assignment TOPIC: - Vector ProductDocument2 pagesClass XI PHYSICS - Class Assignment TOPIC: - Vector Productsudir_phyNo ratings yet
- Gravitation PHY 101 U2Document14 pagesGravitation PHY 101 U2Rashmi ParmarNo ratings yet
- Vector AdditionDocument17 pagesVector AdditionReyginald Marron100% (1)
- Paper 3 March 2024 Mark SchemeDocument13 pagesPaper 3 March 2024 Mark SchemeMirfayz Ruzimurodov100% (2)
- Problem Set 3Document4 pagesProblem Set 3ReemALMousawiNo ratings yet
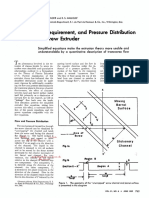
- Flow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderDocument6 pagesFlow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderLê Văn HòaNo ratings yet
- Vector Problems: (Total 3 Marks)Document5 pagesVector Problems: (Total 3 Marks)AN NGUYENNo ratings yet