You might also like
- An Optimal Digital Pulse-Width-Modulated Dither Technique To Enhance The Resolution of Wide Bandgap Device-Based High Frequency Power ConvertersDocument13 pagesAn Optimal Digital Pulse-Width-Modulated Dither Technique To Enhance The Resolution of Wide Bandgap Device-Based High Frequency Power ConvertersĐÌNH CHIẾN NGUYỄNNo ratings yet
- Digital Current Mode Control Architecture With Improved Performance For DC-DC ConvertersDocument6 pagesDigital Current Mode Control Architecture With Improved Performance For DC-DC ConverterszzhbpainNo ratings yet
- Low Cost Microcontroller Based Implementation of Modulation Techniques For Three-Phase Inverter ApplicationsDocument7 pagesLow Cost Microcontroller Based Implementation of Modulation Techniques For Three-Phase Inverter ApplicationsAijaz AhmedNo ratings yet
- A Review of Multisampling Techniques in Power Electronics Applications PDFDocument20 pagesA Review of Multisampling Techniques in Power Electronics Applications PDFMurtaza KaziNo ratings yet
- Reducing Multimedia Decode PowerDocument9 pagesReducing Multimedia Decode PowerArchitSharmaNo ratings yet
- Ring Vco ThesisDocument7 pagesRing Vco Thesisfj8e4mc7100% (1)
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- DSP Based Control of Interleaved Boost ConverterDocument11 pagesDSP Based Control of Interleaved Boost ConverterDany ApablazaNo ratings yet
- A Review of Low Power Processor DesignDocument9 pagesA Review of Low Power Processor DesignNalini RadhakrishnanNo ratings yet
- PWM ThesisDocument4 pagesPWM ThesisPaySomeoneToWriteMyPaperGilbert100% (1)
- Development of A Smart LED Lighting System: Rapid Prototyping ScenarioDocument6 pagesDevelopment of A Smart LED Lighting System: Rapid Prototyping ScenariocarlosNo ratings yet
- Digital Control of Switching Power ConvertersDocument6 pagesDigital Control of Switching Power ConvertersNISHANT VATSNo ratings yet
- A Modular Simulink-Based Controlled Three-Phase Switch Mode InverterDocument7 pagesA Modular Simulink-Based Controlled Three-Phase Switch Mode InverterLee EzzitouniNo ratings yet
- A Low-Power Digital PWM DCDC Converter Based On PaDocument6 pagesA Low-Power Digital PWM DCDC Converter Based On Pasolo4000No ratings yet
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorKiran KNo ratings yet
- Full Custom Design Flow For A Transimpedance Amplifier Using Cadence VirtuosoDocument6 pagesFull Custom Design Flow For A Transimpedance Amplifier Using Cadence VirtuosoRajasekar PanneerselvamNo ratings yet
- Ntroduction: Fig.1. Principle Block DiagramDocument4 pagesNtroduction: Fig.1. Principle Block Diagramanant0008No ratings yet
- Types of Circuit Breaker and Its Application in Su - En.es PDFDocument8 pagesTypes of Circuit Breaker and Its Application in Su - En.es PDFYesica CarrilloNo ratings yet
- Work-In-Progress: Devos: A Learning-Based Delay Model of Voltage-Scaled CircuitsDocument2 pagesWork-In-Progress: Devos: A Learning-Based Delay Model of Voltage-Scaled CircuitsNguyen Van ToanNo ratings yet
- A Digital Assessment Technique of Transformer Winding OscillationsDocument6 pagesA Digital Assessment Technique of Transformer Winding OscillationsV S B Chaitanya DuvvuryNo ratings yet
- SVPWM ThesisDocument9 pagesSVPWM Thesisybkpdsgig100% (2)
- Design of A Novel Energy Efficient Double Tail Dynamic ComparatorDocument5 pagesDesign of A Novel Energy Efficient Double Tail Dynamic ComparatorerpublicationNo ratings yet
- Research Paper On VFDDocument5 pagesResearch Paper On VFDpnquihcnd100% (1)
- Kundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and ActiveDocument12 pagesKundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and Active马晓飞No ratings yet
- Design of Class-A Chopper For Minimizing Load Voltage RippleDocument5 pagesDesign of Class-A Chopper For Minimizing Load Voltage Rippleyemane gebremichalNo ratings yet
- Grid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountDocument7 pagesGrid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountckrimyouNo ratings yet
- On The Implementation of Advanced Hybrid Controllers of AC/DC ConvertersDocument7 pagesOn The Implementation of Advanced Hybrid Controllers of AC/DC ConvertersRamón MirelesNo ratings yet
- DVR Based ThesisDocument5 pagesDVR Based Thesistinajordanhuntsville100% (1)
- LjusevDocument6 pagesLjusevrute silvaNo ratings yet
- (Tutorials in Electronic Materials, Circuits and Devices) Milin Zhang, Zhihua Wang, Jan Van Der Spiegel, Franco Maloberti - Advanced Tutorial On Analog Circuit Design-River Publishers (2023)Document449 pages(Tutorials in Electronic Materials, Circuits and Devices) Milin Zhang, Zhihua Wang, Jan Van Der Spiegel, Franco Maloberti - Advanced Tutorial On Analog Circuit Design-River Publishers (2023)PANKAJ KUMARNo ratings yet
- Design and Implement of Pulse Width Modulation With Low-Cost Hardware in The LoopDocument10 pagesDesign and Implement of Pulse Width Modulation With Low-Cost Hardware in The LoopAbdullah Al MamunNo ratings yet
- Doc-Speed Control of A DC Motor Using Micro Controller 8051Document21 pagesDoc-Speed Control of A DC Motor Using Micro Controller 8051Mohit Keshri100% (1)
- Design of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterDocument15 pagesDesign of Robust Digital PID Controller For H-Bridge Soft-Switching Boost ConverterRaveendhra IitrNo ratings yet
- A Review of Low Power Processor DesignDocument10 pagesA Review of Low Power Processor DesignNalini RadhakrishnanNo ratings yet
- Roba MulDocument56 pagesRoba MulNishitha NishiNo ratings yet
- 72342Document71 pages72342Aidil AzharNo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- Simple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveDocument11 pagesSimple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveVidhya M PNo ratings yet
- Modeling of Multisampled Pulse Width Modulators For Digitally Controlled DCDC Converters PDFDocument9 pagesModeling of Multisampled Pulse Width Modulators For Digitally Controlled DCDC Converters PDFPaulo alexandreNo ratings yet
- Generation of PWM Using Verilog in FPGADocument5 pagesGeneration of PWM Using Verilog in FPGAAMIT VERMANo ratings yet
- Cover Sheet: This Is The Author-Version of A Conference Paper Published AsDocument7 pagesCover Sheet: This Is The Author-Version of A Conference Paper Published AsDizky Christian HadiNo ratings yet
- ICCSP IEEE Published Paper - ManikanthDocument4 pagesICCSP IEEE Published Paper - ManikanthRamesh NairNo ratings yet
- Level Shifter PDFDocument6 pagesLevel Shifter PDFKAMARUDHEEN KPNo ratings yet
- Ijctee 1111 19Document7 pagesIjctee 1111 19AwadHilmyNo ratings yet
- Leakage Power Reduction and Power Delay Product (PDP) Improvement Using Dual Stack MethodDocument9 pagesLeakage Power Reduction and Power Delay Product (PDP) Improvement Using Dual Stack MethoderpublicationNo ratings yet
- PH.D Journal Paper - Eai.7-6-2021.2308767Document8 pagesPH.D Journal Paper - Eai.7-6-2021.2308767scribdjoejoeNo ratings yet
- Three-Phase Photovoltaic Grid-Connected Inverter Using dSPACE DS1104 PlatformDocument6 pagesThree-Phase Photovoltaic Grid-Connected Inverter Using dSPACE DS1104 PlatformBojan BankovicNo ratings yet
- Voltage Control of DC-DC Three Level Boost Converter Using TS Fuzzy PI ControllerDocument6 pagesVoltage Control of DC-DC Three Level Boost Converter Using TS Fuzzy PI ControllerThamazighth HaddadNo ratings yet
- Rapid Prototyping Applications On Three-Phase PWMDocument6 pagesRapid Prototyping Applications On Three-Phase PWMimrankhan1995No ratings yet
- 10 1016@j Isatra 2020 05 015 PDFDocument16 pages10 1016@j Isatra 2020 05 015 PDFFarid KhouchaNo ratings yet
- A Review Report On Multi-Voltage Rule Check - HBRP PublicationDocument11 pagesA Review Report On Multi-Voltage Rule Check - HBRP PublicationSaisantosh RajputhNo ratings yet
- An-Cm-257 Random Pulse Width Modulation For Three-Phase Inverter ApplicationsDocument14 pagesAn-Cm-257 Random Pulse Width Modulation For Three-Phase Inverter ApplicationsLawson SangoNo ratings yet
- Power Stage Design of Fourth-Order DC-DC Converters by Means of Principal Components AnalysisDocument11 pagesPower Stage Design of Fourth-Order DC-DC Converters by Means of Principal Components AnalysiskamiyabNo ratings yet
- All - 19 Tie 4322Document17 pagesAll - 19 Tie 4322shiakrashiddNo ratings yet
- TI Slva882Document19 pagesTI Slva882alprovieNo ratings yet
- Survey On Power Optimization Techniques For Low Power Vlsi Circuit in Deep Submicron TechnologyDocument15 pagesSurvey On Power Optimization Techniques For Low Power Vlsi Circuit in Deep Submicron TechnologyAnonymous e4UpOQEPNo ratings yet
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 pagesTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaNo ratings yet
- Low Power ThesisDocument6 pagesLow Power Thesistiffanybarbermobile100% (2)
- Ac/Dc/Ac: Control SystemDocument6 pagesAc/Dc/Ac: Control SystemFrancisco JimenezNo ratings yet
- Blockchain EditDocument14 pagesBlockchain EditSwastik guptaNo ratings yet
- 2014 Mbihietal AJEEEDocument7 pages2014 Mbihietal AJEEESwastik guptaNo ratings yet
- PBL Report AidmDocument20 pagesPBL Report AidmSwastik guptaNo ratings yet
- UT1 Question BankDocument1 pageUT1 Question BankSwastik guptaNo ratings yet
- Exp 3Document9 pagesExp 3Swastik guptaNo ratings yet
- Bio PBLDocument27 pagesBio PBLSwastik guptaNo ratings yet
- Expt - 7implementation of RSADocument5 pagesExpt - 7implementation of RSASwastik guptaNo ratings yet
- 3ds Max 2018 Help - Additional Keyboard Commands - AutodeskDocument2 pages3ds Max 2018 Help - Additional Keyboard Commands - Autodeskbackupsanthosh21 dataNo ratings yet
- E-Commerce Questions PDFDocument3 pagesE-Commerce Questions PDFAkashNo ratings yet
- Audi B6 AMB Engine Removing and Installing PDFDocument27 pagesAudi B6 AMB Engine Removing and Installing PDFjugoslavdjurdj100% (4)
- Underpass FJ Brochure TuksuDocument10 pagesUnderpass FJ Brochure Tuksuprashant dhotre50% (2)
- Fyp 1Document26 pagesFyp 1Taha RahatNo ratings yet
- ARES CatalogDocument10 pagesARES CatalogjillianixNo ratings yet
- IBM C-Study 2020 - CEO - Seizing-The-Data-AdvantageDocument24 pagesIBM C-Study 2020 - CEO - Seizing-The-Data-AdvantageArturo Diaz AguloNo ratings yet
- 1006 Quality Management PlanDocument35 pages1006 Quality Management PlanSalaNo ratings yet
- Manual Pos Facil v2.0Document332 pagesManual Pos Facil v2.0comercial abreuNo ratings yet
- Analytics Certification Exam AnswersDocument17 pagesAnalytics Certification Exam AnswersWahyuni SalmanNo ratings yet
- DataStage Configuration FileDocument7 pagesDataStage Configuration FilerachitNo ratings yet
- Chapter 4 - E-StartupsDocument15 pagesChapter 4 - E-StartupsGagana PNo ratings yet
- Textaizer Pro - HelpDocument44 pagesTextaizer Pro - HelpfarhoodNo ratings yet
- HP Hewlett Packard sn3000b Manual de UsuarioDocument8 pagesHP Hewlett Packard sn3000b Manual de UsuariofeliproNo ratings yet
- Marine Auxiliary Engine: Features and BenefitsDocument2 pagesMarine Auxiliary Engine: Features and BenefitsVijayabhaskar SiddiNo ratings yet
- PDFDocument34 pagesPDFrehan100% (2)
- Project MRPDocument2 pagesProject MRPsiddharthmalooNo ratings yet
- MM 321 Field ReportDocument15 pagesMM 321 Field ReportSiddhant Vishal Chand0% (1)
- Geh 6777Document94 pagesGeh 6777Lyman ConnorNo ratings yet
- Empowerment TechnologyDocument14 pagesEmpowerment TechnologyRIZA SAMPAGANo ratings yet
- ReadMeSAP2000v1700 PDFDocument4 pagesReadMeSAP2000v1700 PDFTj TalhaNo ratings yet
- Lecture13 BJT Transistor Circuit AnalysisDocument24 pagesLecture13 BJT Transistor Circuit Analysisazur33nNo ratings yet
- 8da DB Ha 35 11 enDocument60 pages8da DB Ha 35 11 enIRCON RAPDRP Electrical ProjectsNo ratings yet
- ATPL AGK Systems Questions BankDocument90 pagesATPL AGK Systems Questions BankadiNo ratings yet
- 2.1.3.6 Lab - Setting Up A Virtualized Server EnvironmentDocument13 pages2.1.3.6 Lab - Setting Up A Virtualized Server EnvironmentCarlos Sulca Neira100% (1)
- General Specifications - YTA110 Temperature Transmitter HART Communication PDFDocument2 pagesGeneral Specifications - YTA110 Temperature Transmitter HART Communication PDFcbaliveNo ratings yet
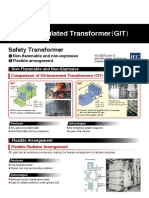
- Gas Insulated Transformer (GIT)Document2 pagesGas Insulated Transformer (GIT)Enmanuel David Parra SantosNo ratings yet
- Installation Manual: Generator SetDocument86 pagesInstallation Manual: Generator SetAdrián Darío Nieves LeyvaNo ratings yet
- Project On Wipro LTDDocument89 pagesProject On Wipro LTDViPul84% (43)
- Kaixin: User's ManualDocument49 pagesKaixin: User's ManualRicardo PérezNo ratings yet