You might also like
- Delta TDocument2 pagesDelta Tbakup725100% (1)
- Chapter 6 Review Questions Math 30-1 Trigonometric FunctionsDocument14 pagesChapter 6 Review Questions Math 30-1 Trigonometric FunctionsMath 30-1 EDGE Study Guide Workbook - by RTD LearningNo ratings yet
- Directional Over Current Relay (67) - Numerical RelaysDocument12 pagesDirectional Over Current Relay (67) - Numerical RelaysAbdus SalamNo ratings yet
- Phase AnalysisDocument3 pagesPhase Analysisk_shah_777No ratings yet
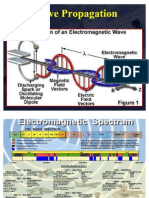
- Lesson 2 Wave PropagationDocument31 pagesLesson 2 Wave PropagationChuck LynchNo ratings yet
- Advanced Mechanical Vibrations - Physics, Mathematics and ApplicationsDocument339 pagesAdvanced Mechanical Vibrations - Physics, Mathematics and ApplicationsIsrar UllahNo ratings yet
- Floating Break WaterDocument160 pagesFloating Break WaterLoysa Agtarap MataNo ratings yet
- Multiple Choice QuizDocument5 pagesMultiple Choice QuizQuoc NguyenNo ratings yet
- 1 s2.0 S0030401821000316 MainDocument14 pages1 s2.0 S0030401821000316 MainRustin PurplemanNo ratings yet
- 1996investigation of Turbulent Flow by Means of The PIV MethoDocument9 pages1996investigation of Turbulent Flow by Means of The PIV MethoAjita NeogiNo ratings yet
- Factors Affecting The Measurement Resolution of Super-Resolution Techniques Based On Speckle InterferometryDocument15 pagesFactors Affecting The Measurement Resolution of Super-Resolution Techniques Based On Speckle InterferometryDav KhNo ratings yet
- Development of A Real Time Closed Loop Nano-Positioning System Embedded With A Capacitive SensorDocument11 pagesDevelopment of A Real Time Closed Loop Nano-Positioning System Embedded With A Capacitive Sensormd shofiqulNo ratings yet
- Holistic Optimization Architecture Enabling Sub-14-Nm Projection LithographyDocument11 pagesHolistic Optimization Architecture Enabling Sub-14-Nm Projection LithographySudip DasNo ratings yet
- Frame-Skip Convolutional Neural Networks For Action RecognitionDocument6 pagesFrame-Skip Convolutional Neural Networks For Action RecognitionMitchell Angel Gomez OrtegaNo ratings yet
- Real-Time Tracking of Guidewire Robot Tips Using Deep Convolutional Neural Networks On Successive Localized FramesDocument11 pagesReal-Time Tracking of Guidewire Robot Tips Using Deep Convolutional Neural Networks On Successive Localized FramesNishant UzirNo ratings yet
- 451 Y013 PDFDocument3 pages451 Y013 PDFSinagolNo ratings yet
- Correlation-Based Motion Vector Processing With Adaptive Interpolation Scheme For Motion-Compensated Frame InterpolationDocument14 pagesCorrelation-Based Motion Vector Processing With Adaptive Interpolation Scheme For Motion-Compensated Frame Interpolationzhipenglin73No ratings yet
- 34 - Noncontact Operational Modal Analysis of Light Poles by Vision-Based Motion-Magnification Method (ES)Document14 pages34 - Noncontact Operational Modal Analysis of Light Poles by Vision-Based Motion-Magnification Method (ES)Bridge&StructureNo ratings yet
- Integral-Sliding-Mode-Observer-Based Structure and Motion Estimation of A Single Object in General Motion Using A Monocular Dynamic CameraDocument16 pagesIntegral-Sliding-Mode-Observer-Based Structure and Motion Estimation of A Single Object in General Motion Using A Monocular Dynamic CameraArmandoNo ratings yet
- Fluids 06 00430Document12 pagesFluids 06 00430ranim najibNo ratings yet
- What Is Particle Image Velocimetry?Document9 pagesWhat Is Particle Image Velocimetry?riemanndiskNo ratings yet
- AF7 TecMedDocument8 pagesAF7 TecMedNicolás SilvaNo ratings yet
- Mechanical Engineering PaperDocument14 pagesMechanical Engineering Paperfatiabb99No ratings yet
- 2003 Development20of20X-ray20ScannerDocument7 pages2003 Development20of20X-ray20ScannerBABLU TIWARINo ratings yet
- Scanning Probe Microscope Dimensional Metrology at Nist: Home Search Collections Journals About Contact Us My IopscienceDocument12 pagesScanning Probe Microscope Dimensional Metrology at Nist: Home Search Collections Journals About Contact Us My IopscienceubuyukduruNo ratings yet
- (Prof Dzung) Noise and Frequency Analyses of A Miniaturized 3-DOF Accelerometer Utilizing Silicon Nanowire Pie (1992)Document4 pages(Prof Dzung) Noise and Frequency Analyses of A Miniaturized 3-DOF Accelerometer Utilizing Silicon Nanowire Pie (1992)Quan LinhNo ratings yet
- Cierpka 2011 Meas. Sci. Technol. 22 015401Document11 pagesCierpka 2011 Meas. Sci. Technol. 22 015401hunbun1410No ratings yet
- Deflectometry Based Android Application For Non-Destructive Testing of Different Optical ComponentsDocument11 pagesDeflectometry Based Android Application For Non-Destructive Testing of Different Optical ComponentsAmit ChatterjeeNo ratings yet
- A Method of Low-Cost IMU Calibration and AlignmentDocument6 pagesA Method of Low-Cost IMU Calibration and AlignmentAerojet Rocketdyne RS-25No ratings yet
- 2012 ArticleDocument4 pages2012 Article戴翰明No ratings yet
- Turbidimetry by Image Degradation AnalysisDocument6 pagesTurbidimetry by Image Degradation Analysisprakashjyoti0901No ratings yet
- Lane, Elliott, MacAulay - 2003 - Confocal Microendoscopy With Chromatic SectioningDocument4 pagesLane, Elliott, MacAulay - 2003 - Confocal Microendoscopy With Chromatic SectioningXavier AriasNo ratings yet
- A Review On An Efficient Multi-Focus Image Fusion Scheme Based On PCNNDocument3 pagesA Review On An Efficient Multi-Focus Image Fusion Scheme Based On PCNNJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Comparing Optical Flow Algorithms Using 6-DOF Motion of Real-World Rigid ObjectsDocument11 pagesComparing Optical Flow Algorithms Using 6-DOF Motion of Real-World Rigid ObjectsGauri NihongoNo ratings yet
- 1 s2.0 S0263822321006401 MainDocument10 pages1 s2.0 S0263822321006401 MainAbdelali YacoubiNo ratings yet
- Construction and Evaluation of A Traceable Metrological ScanningDocument6 pagesConstruction and Evaluation of A Traceable Metrological ScanningDiana Alejandra Bermudez FajardoNo ratings yet
- SVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsDocument18 pagesSVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsMike AlonsoNo ratings yet
- Design and Implementation of An Inertial NavigatioDocument6 pagesDesign and Implementation of An Inertial NavigatiohafezasadNo ratings yet
- An Integrated Image Motion Sensor For Micro CameraDocument7 pagesAn Integrated Image Motion Sensor For Micro CameraPons PlayNo ratings yet
- Robust Motion Estimation Using Trajectory Spectrum Learning: Application To Aortic and Mitral Valve Modeling From 4D TEEDocument9 pagesRobust Motion Estimation Using Trajectory Spectrum Learning: Application To Aortic and Mitral Valve Modeling From 4D TEEherusyahputraNo ratings yet
- A Novel Magnetostrictive Curvature Sensor Employing Flexible, Figure-of-Eight Sensing CoilsDocument4 pagesA Novel Magnetostrictive Curvature Sensor Employing Flexible, Figure-of-Eight Sensing CoilsakruNo ratings yet
- 1 s2.0 S0263224121010757 MainDocument8 pages1 s2.0 S0263224121010757 MainMuhammad RiazNo ratings yet
- Ultramicroscopy: P. Biczysko, A. Dzierka, G. Jó Zwiak, M. Rudek, T. Gotszalk, P. Janus, P. Grabiec, I.W. RangelowDocument10 pagesUltramicroscopy: P. Biczysko, A. Dzierka, G. Jó Zwiak, M. Rudek, T. Gotszalk, P. Janus, P. Grabiec, I.W. RangelowseptianNo ratings yet
- Journal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationDocument12 pagesJournal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationLeafar OllebarNo ratings yet
- Mechatronics: Dongwoo Kang, Kihyun Kim, Dongmin Kim, Jongyoup Shim, Dae-Gab Gweon, Jaehwa JeongDocument9 pagesMechatronics: Dongwoo Kang, Kihyun Kim, Dongmin Kim, Jongyoup Shim, Dae-Gab Gweon, Jaehwa JeongMAHESH VNo ratings yet
- Lei2022 Article MeasurementMethodOfNanofluidsADocument13 pagesLei2022 Article MeasurementMethodOfNanofluidsAYong FuNo ratings yet
- Winstroth 2014 J. Phys. Conf. Ser. 524 012064Document13 pagesWinstroth 2014 J. Phys. Conf. Ser. 524 012064Julliana Patrice Angeles STEM 11 RUBYNo ratings yet
- Image Reconstruction Using Matched Wavelet Estimated From Data Sensed Compressively Using Partial Canonical Identity MatrixDocument16 pagesImage Reconstruction Using Matched Wavelet Estimated From Data Sensed Compressively Using Partial Canonical Identity Matrixsurya kavithaNo ratings yet
- Digital Image Correlation Applied To The Calculation of The Out-Of-Plane Deformation Induced by The Formation of Roll Waves in A Non-Newtonian FluidDocument9 pagesDigital Image Correlation Applied To The Calculation of The Out-Of-Plane Deformation Induced by The Formation of Roll Waves in A Non-Newtonian FluidVicente de Paulo Gonçalves JuniorNo ratings yet
- Scanning Strategy of Deviation-Boundary Prediction Based On Probe DynamicsDocument13 pagesScanning Strategy of Deviation-Boundary Prediction Based On Probe DynamicsGSET LibraryNo ratings yet
- Improved Wavelet-Based Watermarking ThroughDocument9 pagesImproved Wavelet-Based Watermarking ThroughJerald RoyNo ratings yet
- Mine Surveying Control of Wells: IOP Conference Series: Materials Science and EngineeringDocument7 pagesMine Surveying Control of Wells: IOP Conference Series: Materials Science and EngineeringBenhabireche AbdelhamidNo ratings yet
- Vision-Based Displacement Measurement Sensor Using Modified Taylor Approximation ApproachDocument11 pagesVision-Based Displacement Measurement Sensor Using Modified Taylor Approximation Approachmaniamjad321No ratings yet
- Omega-K AlgorithmDocument12 pagesOmega-K AlgorithmJesus SantanderNo ratings yet
- Wang 2016 Meas. Sci. Technol. 27 115008Document10 pagesWang 2016 Meas. Sci. Technol. 27 115008mohamadazareshNo ratings yet
- Accurate Polarization Control in Nonorthogonal Two-Axis Lloyd 'S Mirror Interferometer For Fabrication of Two-Dimensional Scale GratingsDocument13 pagesAccurate Polarization Control in Nonorthogonal Two-Axis Lloyd 'S Mirror Interferometer For Fabrication of Two-Dimensional Scale GratingssankhaNo ratings yet
- Particle Image VelocimetryDocument16 pagesParticle Image VelocimetrySiamakNo ratings yet
- Exploring Representation Learning With CNNsDocument8 pagesExploring Representation Learning With CNNsItem SongsNo ratings yet
- Displacement Estimation of A RC Beam Test Based On TSS AlgorithmDocument4 pagesDisplacement Estimation of A RC Beam Test Based On TSS AlgorithmAdriana Montilla BolañosNo ratings yet
- Characterization of GaAs-AlGaAs Structures Using Scanning PhotoluminescenceDocument7 pagesCharacterization of GaAs-AlGaAs Structures Using Scanning PhotoluminescencetlmorettiNo ratings yet
- Wernet 2000Document29 pagesWernet 2000Hussnain AliNo ratings yet
- Grosso E Articolo 1995 ActiveDocument12 pagesGrosso E Articolo 1995 ActiveMaria PaladeNo ratings yet
- Lucas Kanade Optical FlowDocument5 pagesLucas Kanade Optical Flowjose diazNo ratings yet
- Kim 2012 Metrologia 49 273 PDFDocument11 pagesKim 2012 Metrologia 49 273 PDFMichael Varela GuglielmelliNo ratings yet
- Laser Scanning MicrosDocument13 pagesLaser Scanning MicrosHà An Đỗ NgọcNo ratings yet
- 2022 - Model-Free Repetitive Control Design and Implementation For Dynamical Galvanometer-Based Raster ScanningDocument11 pages2022 - Model-Free Repetitive Control Design and Implementation For Dynamical Galvanometer-Based Raster Scanningcjws80293No ratings yet
- Scattering of Spherically and Hemispherically Stratified Lenses Fed by Any Real SourceDocument11 pagesScattering of Spherically and Hemispherically Stratified Lenses Fed by Any Real Sourcekumaravel.s2023No ratings yet
- Solid Insulators in Vacuum: A Review (Invited Paper) : R Hawley, CDocument8 pagesSolid Insulators in Vacuum: A Review (Invited Paper) : R Hawley, CsplendorNo ratings yet
- Ink Printing: RefekexcesDocument10 pagesInk Printing: RefekexcessplendorNo ratings yet
- JET John: Hard Copy and Printing Technologies (1990) / 183Document11 pagesJET John: Hard Copy and Printing Technologies (1990) / 183splendorNo ratings yet
- Guide For Authors: About The JournalDocument11 pagesGuide For Authors: About The JournalsplendorNo ratings yet
- Data Communication: Asst. Prof Madan Raj Upreti Nepal Engineering College Bhaktpur, Changunaryan-NepalDocument21 pagesData Communication: Asst. Prof Madan Raj Upreti Nepal Engineering College Bhaktpur, Changunaryan-NepalKishor KadelNo ratings yet
- The Principle of Superposition For Waves: ArticleDocument9 pagesThe Principle of Superposition For Waves: ArticleM. BharathNo ratings yet
- In wheelMotorDesignforanElectricScooterDocument11 pagesIn wheelMotorDesignforanElectricScooterVishal ThakurNo ratings yet
- Dynamic Simulation of Brushless DC Motor DrivesDocument7 pagesDynamic Simulation of Brushless DC Motor DrivesMehmet KırgözoğluNo ratings yet
- 17.1 Oscillations and Simple Harmonic Motion: ChallengeDocument13 pages17.1 Oscillations and Simple Harmonic Motion: ChallengeantonioNo ratings yet
- Basic Facts About CirulatorsDocument10 pagesBasic Facts About CirulatorsVikas PsNo ratings yet
- Physics 2325 Exam 3-3 ReviewDocument11 pagesPhysics 2325 Exam 3-3 ReviewArvn Christian Santicruz FloresNo ratings yet
- Section 7 Frequency Response AnalysisDocument113 pagesSection 7 Frequency Response AnalysisNgô Minh KhánhNo ratings yet
- CSE Diploma SyllabusDocument181 pagesCSE Diploma SyllabusSaritha BanuramanNo ratings yet
- DeberDocument3 pagesDeberCristian Arevalo BriceñoNo ratings yet
- FM Theory and Applications by Musicians For Musicians by John Chowning, David BristowDocument196 pagesFM Theory and Applications by Musicians For Musicians by John Chowning, David Bristowgmaiadremailfeis22No ratings yet
- The Interaction of Light and Matter: and N: Refractive IndexDocument31 pagesThe Interaction of Light and Matter: and N: Refractive IndexFarizalNo ratings yet
- Lab 6 DSPDocument15 pagesLab 6 DSPAhmed Razi UllahNo ratings yet
- Transmitter Simulink StudyDocument38 pagesTransmitter Simulink StudyLucky Asr AwaisNo ratings yet
- 9702 - s19 - QP - 23 (Dragged)Document2 pages9702 - s19 - QP - 23 (Dragged)Nezza WidarkoNo ratings yet
- Ma Kai-Kuang (Tutorial+Lectures)Document157 pagesMa Kai-Kuang (Tutorial+Lectures)Ang KhengNo ratings yet
- Chapter 5 OscDocument36 pagesChapter 5 OschasyikinNo ratings yet
- Labsheet-1: Question No.1:Basic Signal Generation and PlottingDocument15 pagesLabsheet-1: Question No.1:Basic Signal Generation and PlottingmanasNo ratings yet
- Analog Communication - Angle ModulationDocument7 pagesAnalog Communication - Angle ModulationkhalidNo ratings yet
- Continuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcDocument17 pagesContinuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcRutu ShuklaNo ratings yet
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.776 High Speed Communications Circuits Spring 2005Document29 pagesMassachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.776 High Speed Communications Circuits Spring 2005adi3443No ratings yet
- Statistical Multipath Model Lecture4 PDFDocument16 pagesStatistical Multipath Model Lecture4 PDFkivetiNo ratings yet