You might also like
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Gnss Surveying 2021Document49 pagesGnss Surveying 2021jisongulwa100% (1)
- How GPS Works: A Concise GuideDocument20 pagesHow GPS Works: A Concise GuideJanardanNo ratings yet
- AIS Guide: Automatic Identification SystemDocument5 pagesAIS Guide: Automatic Identification SystemsbdmanNo ratings yet
- Passage Planning Lecture 5Document10 pagesPassage Planning Lecture 5Arwa Hussein100% (1)
- Satellite Navigation Systems ExplainedDocument144 pagesSatellite Navigation Systems ExplainedEreN100% (1)
- Differential Gps (DGPS) : Under The Guidance Of: Dr. Vageesha S. MathadaDocument21 pagesDifferential Gps (DGPS) : Under The Guidance Of: Dr. Vageesha S. MathadaShaik Zeeshan100% (1)
- SELEX Galileo (Italy) - Jane's Air Traffic ControlDocument2 pagesSELEX Galileo (Italy) - Jane's Air Traffic Controlsaaz77No ratings yet
- WACA Entry Quiz HIMT 271115Document12 pagesWACA Entry Quiz HIMT 271115jdNo ratings yet
- Official charts and ENC carriage requirementsDocument4 pagesOfficial charts and ENC carriage requirementsreuben ephraim100% (2)
- 3.0 Notice To MarinersDocument19 pages3.0 Notice To MarinersShailendra Vishwakarma100% (1)
- DGPS Stations in IndiaDocument13 pagesDGPS Stations in IndiamhegdenNo ratings yet
- GPS and Navigation FundamentalsDocument28 pagesGPS and Navigation FundamentalsBalasi SimonaNo ratings yet
- Function: Navigation at The Operational Level Competence: Plan and Conduct A Passage and Determine PositionDocument4 pagesFunction: Navigation at The Operational Level Competence: Plan and Conduct A Passage and Determine PositionAbu Nawshad100% (3)
- GPSDocument149 pagesGPSVivek Gill100% (2)
- Notes On Satellite Navigation System-1Document11 pagesNotes On Satellite Navigation System-1Md Monir HossainNo ratings yet
- GPS: Global Positioning System Explained in 40 CharactersDocument15 pagesGPS: Global Positioning System Explained in 40 CharactersSamir Alshaar100% (1)
- Mod Nav 101b 10 r.3Document4 pagesMod Nav 101b 10 r.3YANGUAS, NIÑA MICAELLA R.100% (2)
- Reliance on Electronic NavigationDocument2 pagesReliance on Electronic Navigationsergiuserban100% (1)
- ECDIS: An Electronic Chart Display and Information SystemDocument63 pagesECDIS: An Electronic Chart Display and Information SystemShah AlimNo ratings yet
- Automatic Radar Plotting Aid: HistoryDocument4 pagesAutomatic Radar Plotting Aid: HistoryJet Lee100% (1)
- Document Akash PDFDocument4 pagesDocument Akash PDFAjit Tiwary100% (3)
- Glonass: Q-1. What Is GLONASS? Describe The Principle On Which The GLONASS WorksDocument3 pagesGlonass: Q-1. What Is GLONASS? Describe The Principle On Which The GLONASS WorksAsus FonepadNo ratings yet
- Charts and DistancesDocument5 pagesCharts and DistancesKryle Dusaban100% (2)
- Gps (Global Processing System: Presented byDocument35 pagesGps (Global Processing System: Presented byRamakrishna RajuNo ratings yet
- GPS For Environmental ManagementDocument17 pagesGPS For Environmental ManagementDurgesh Kumar0% (1)
- C2 - Types of Electronic ChartsDocument13 pagesC2 - Types of Electronic ChartsPopa Victor-Ionuț100% (2)
- Map Projections ExplainedDocument17 pagesMap Projections ExplainedMelisa AyuningtyasNo ratings yet
- Principles of GPS 4-13-04Document54 pagesPrinciples of GPS 4-13-04GenNo ratings yet
- SUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)Document7 pagesSUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)mruzainimf89% (9)
- Federal Space Agency Presents Updates on GLONASS Navigation SystemDocument31 pagesFederal Space Agency Presents Updates on GLONASS Navigation Systempentritt100% (1)
- ORAL Assessment (Prelim) Topic: Voyage Planning: Mhel Virgil Genabe BSMT 3-1Document2 pagesORAL Assessment (Prelim) Topic: Voyage Planning: Mhel Virgil Genabe BSMT 3-1Yhielmar Po Saburnido100% (2)
- What is a weather routeing systemDocument2 pagesWhat is a weather routeing systemMark Angelo Castro100% (2)
- Kaartpassen: 1. Chart FundamentalsDocument34 pagesKaartpassen: 1. Chart FundamentalsKaptanlar100% (2)
- GPS Fundamentals ExplainedDocument148 pagesGPS Fundamentals ExplainedSandeep Reddy100% (1)
- ARPADocument5 pagesARPATyTy Chhom100% (1)
- Iec 61996-1Document60 pagesIec 61996-1우승환Woo seung hwan100% (1)
- Terrestrial and Coastal Navigation 1: Instructor/Date Assessor/Date Program Head/DateDocument3 pagesTerrestrial and Coastal Navigation 1: Instructor/Date Assessor/Date Program Head/DateFrednixen Gapoy100% (3)
- Positioning by Global Positioning SystemDocument56 pagesPositioning by Global Positioning SystemSagar Ranabhat100% (1)
- On GyroDocument41 pagesOn GyroShyam Pandey100% (1)
- Route Planning and Chart CorrectionDocument3 pagesRoute Planning and Chart CorrectionRobert M. Maluya100% (3)
- Lesson 6. Cartographic Principles & DesignDocument14 pagesLesson 6. Cartographic Principles & Designsheil.cogay100% (1)
- What is ECDIS? Guide to the Electronic Chart Display and Information SystemDocument6 pagesWhat is ECDIS? Guide to the Electronic Chart Display and Information SystemZobaer Ahmed100% (1)
- Meaning of Cadastral SurveyDocument11 pagesMeaning of Cadastral SurveyTuan NurhanisahNo ratings yet
- RTK and DGPS GuideDocument2 pagesRTK and DGPS GuideRJ BedañoNo ratings yet
- Modern Survey TechniquesDocument15 pagesModern Survey TechniquesNishant DasNo ratings yet
- Parallel Indexing by I.smith & R.a.mulroneyDocument22 pagesParallel Indexing by I.smith & R.a.mulroneyKrishna Na100% (1)
- 100% Nautical ChartDocument12 pages100% Nautical ChartFaiz Azemee100% (4)
- Differential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementDocument26 pagesDifferential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementSanjana PulapaNo ratings yet
- Urban Transportation Planning..Document12 pagesUrban Transportation Planning..priyaranjan naskarNo ratings yet
- Ecdis Type Approval CertDocument4 pagesEcdis Type Approval CerttestNo ratings yet
- Daily Motion and Horizontal System of Co-OrdinatesDocument20 pagesDaily Motion and Horizontal System of Co-Ordinatesdonato del rosarioNo ratings yet
- Carriage RequirementsDocument63 pagesCarriage RequirementsFred GrosfilerNo ratings yet
- General Questions For CadetsDocument3 pagesGeneral Questions For CadetsLuka JaparidzeNo ratings yet
- Bicol Merchant Marine College Inc. Rizal Ave. Piot, Sorsogon City EmailDocument2 pagesBicol Merchant Marine College Inc. Rizal Ave. Piot, Sorsogon City EmailPaulo Generalo100% (1)
- GPS Signal Structure and Modulation TechniquesDocument23 pagesGPS Signal Structure and Modulation Techniqueskrishna144No ratings yet
- Advanced Electronic Navigation SystemsDocument19 pagesAdvanced Electronic Navigation SystemsAKANKSHA PANDEYNo ratings yet
- การต่อ chartDocument1 pageการต่อ chartautsada100% (2)
- Hydrographic SurveyingDocument62 pagesHydrographic SurveyingSridhar Natarajan100% (1)
- EEE381B Aerospace Navigation SystemsDocument52 pagesEEE381B Aerospace Navigation SystemsMohammad Ahmed100% (1)
- Latitude and Longitude of Tamil Nadu, Lat Long of Tamil NaduDocument4 pagesLatitude and Longitude of Tamil Nadu, Lat Long of Tamil NaduJessica AndersonNo ratings yet
- PHNLChartsDocument52 pagesPHNLChartsBagasNo ratings yet
- EYKADocument17 pagesEYKAPéter SzatmáryNo ratings yet
- ND A320Document11 pagesND A320puneetkhokhar4504No ratings yet
- Global Navigation Systems in 40 CharactersDocument3 pagesGlobal Navigation Systems in 40 CharactersLayu LydieNo ratings yet
- M SHELDocument5 pagesM SHELErwin Paulian SihombingNo ratings yet
- Hold, Then Reverse and GPS and Victor AirwaysDocument5 pagesHold, Then Reverse and GPS and Victor AirwaysGooreshNo ratings yet
- Surveying Traverse Calculation: Martha Leni SiregarDocument36 pagesSurveying Traverse Calculation: Martha Leni SiregarNicholasNo ratings yet
- Document Splitting in The Special Purpose LedgerDocument4 pagesDocument Splitting in The Special Purpose LedgerHaritha AnanthulaNo ratings yet
- 1st Regional Training On Toponymy: National Mapping and Resource Information (NAMRIA) 20 March 2018Document30 pages1st Regional Training On Toponymy: National Mapping and Resource Information (NAMRIA) 20 March 2018mirshaNo ratings yet
- BRS 2590/15 AUG/QPS-BSB: - Not For Real World NavigationDocument23 pagesBRS 2590/15 AUG/QPS-BSB: - Not For Real World NavigationFrancisco FortesNo ratings yet
- Orienteering LessonDocument18 pagesOrienteering LessonRyan Kale Santos SalvadorNo ratings yet
- Manual NAVIGAT X MK 1 PDFDocument192 pagesManual NAVIGAT X MK 1 PDFTallNo ratings yet
- VT Ad 2.Vtpp en GBDocument38 pagesVT Ad 2.Vtpp en GBSandeeNo ratings yet
- IMO Model Course 1.07 On Radar Navigation at Operational Level (Secretariat)Document302 pagesIMO Model Course 1.07 On Radar Navigation at Operational Level (Secretariat)PETER RAFA100% (2)
- Transmission Line Data 2011Document20 pagesTransmission Line Data 2011meseretyalew2014No ratings yet
- IBS IMCS AOPV1187 PraesentationDocument1 pageIBS IMCS AOPV1187 Praesentationbipinsarkar88No ratings yet
- MZ-5301-07 Voyage Plan Version 2018-09-13 ADocument11 pagesMZ-5301-07 Voyage Plan Version 2018-09-13 ALj NecesitoNo ratings yet
- Navigation in Ancient India - Sanskriti - Hinduism and Indian Culture WebsiteDocument3 pagesNavigation in Ancient India - Sanskriti - Hinduism and Indian Culture WebsiteSureshNo ratings yet
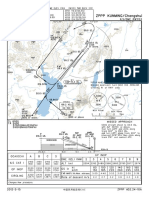
- Approach Instrument ZPPP KUNMING/Changshui: Ils/Dme Rwy03Document1 pageApproach Instrument ZPPP KUNMING/Changshui: Ils/Dme Rwy03tondoyNo ratings yet
- 061 - General Navigation - AnswersDocument76 pages061 - General Navigation - AnswersEASA ATPL Question Bank100% (1)
- ZSCGDocument22 pagesZSCGjoker hotNo ratings yet
- GNSS Principles and Comparison: GPS, GLONASS, Galileo and CompassDocument10 pagesGNSS Principles and Comparison: GPS, GLONASS, Galileo and CompassAndrei SimionNo ratings yet
- OTHTTS1Document2 pagesOTHTTS1Marcos VelasquezNo ratings yet
- BATHAN-PAUL GABRIEL G-SEA204B2-Activity-Sheet-No.13Document5 pagesBATHAN-PAUL GABRIEL G-SEA204B2-Activity-Sheet-No.13Paul Gabriel BathanNo ratings yet
- DIPS – GEOTECHNICAL SOFTWARE ANALYSISDocument46 pagesDIPS – GEOTECHNICAL SOFTWARE ANALYSIScototo33No ratings yet
- Gps SurveyDocument13 pagesGps SurveyBakhtiyar Q.KhawajaNo ratings yet
- SUR (Compass Traversing)Document26 pagesSUR (Compass Traversing)sai associatesNo ratings yet
- Topographic Map of Mustang CreekDocument1 pageTopographic Map of Mustang CreekHistoricalMapsNo ratings yet