You might also like
- SynchmtrDocument20 pagesSynchmtrmeNo ratings yet
- Synchronous Motor Control PDFDocument20 pagesSynchronous Motor Control PDFPradeep_VashistNo ratings yet
- Plant Efficiencies Benefit by Selection of Synchronous MotorDocument9 pagesPlant Efficiencies Benefit by Selection of Synchronous Motorpichet_krongyart2859No ratings yet
- Induction and Synchronous Motor FundamentalsDocument9 pagesInduction and Synchronous Motor FundamentalsfitxvNo ratings yet
- Answers 4,5,6Document8 pagesAnswers 4,5,6Mohsin TariqNo ratings yet
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Electrical Machines Final AssignmentDocument13 pagesElectrical Machines Final Assignmentaamir.faiazNo ratings yet
- 3.18 Ac MotorsDocument25 pages3.18 Ac Motorsdeleted Yt acc.No ratings yet
- Assignment 6 VincoyDocument16 pagesAssignment 6 VincoyVincoy JohnlloydNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Jayashree Make Soft Starter TheoryDocument14 pagesJayashree Make Soft Starter TheoryMihirNo ratings yet
- Everything You Need to Know About Servo ControlDocument24 pagesEverything You Need to Know About Servo Controlafe2000must9083No ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- Syncronous MotorDocument22 pagesSyncronous MotorSambhav JainNo ratings yet
- Repulsion Motor SSCJE QUICK NOTE1Document5 pagesRepulsion Motor SSCJE QUICK NOTE1bmanisankarNo ratings yet
- Three Phase Induction MotorDocument16 pagesThree Phase Induction MotorPushan Kumar DattaNo ratings yet
- Module V Synchronous MotorsDocument21 pagesModule V Synchronous Motorsyanith kumarNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- Synchronous Motor & Its Applications & Power Factor ImprovementDocument4 pagesSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalNo ratings yet
- EI4-Synchronous Motors Operating Principles and Starting MethodsDocument7 pagesEI4-Synchronous Motors Operating Principles and Starting MethodsRogger FabricioNo ratings yet
- Synchronous MotorDocument33 pagesSynchronous Motorvnyshreyas100% (2)
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Pilot ExciterDocument6 pagesPilot ExciterRudy HerreraNo ratings yet
- Fina - Ut-5 SSDDocument71 pagesFina - Ut-5 SSDPrabhu KpNo ratings yet
- Motors and DrivesDocument23 pagesMotors and DrivesharishkumarsinghNo ratings yet
- Synchronous MotorsDocument27 pagesSynchronous MotorsSyed Muhammad Munavvar Hussain50% (2)
- MotorsDocument7 pagesMotorsVikramNo ratings yet
- Synchronous MotorDocument26 pagesSynchronous MotorSyed Muhammad Munavvar HussainNo ratings yet
- Unit-5 SMDocument27 pagesUnit-5 SMShaik ShaheenaNo ratings yet
- DC vs AC Motors GuideDocument13 pagesDC vs AC Motors GuideYash Jude NathanNo ratings yet
- EE 306 - Electrical Engineering LaboratoryDocument10 pagesEE 306 - Electrical Engineering LaboratoryMohammed KhouliNo ratings yet
- 2:induction Motor Action: Torque Induced Magnetic FieldDocument3 pages2:induction Motor Action: Torque Induced Magnetic Fieldapi-19880840No ratings yet
- Speed Control of Induction Motor Using AnnDocument67 pagesSpeed Control of Induction Motor Using AnnBnr Goud50% (6)
- Induction Motor: AC Motor GuideDocument7 pagesInduction Motor: AC Motor GuideAbhishek ChibNo ratings yet
- Ac Motors: An AC Motor Is An Driven by AnDocument18 pagesAc Motors: An AC Motor Is An Driven by AnBalamuni PsaNo ratings yet
- EM 2 - Unit 4Document62 pagesEM 2 - Unit 4Black DiamoondNo ratings yet
- Ac MotorsDocument10 pagesAc MotorsJonas Marco CagueteNo ratings yet
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- Motors and Motor Controls Lesson 3Document27 pagesMotors and Motor Controls Lesson 3Madhava ReddyNo ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- Single Phase Induction MotorDocument7 pagesSingle Phase Induction MotorReeta Dutta100% (1)
- DC and Ac Motor Basic PrincipleDocument1 pageDC and Ac Motor Basic Principledan matombeNo ratings yet
- History: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionDocument8 pagesHistory: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionegyptonNo ratings yet
- GMI AC Motor GuideDocument54 pagesGMI AC Motor GuideSmai HondoNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- Understanding Induction MotorsDocument28 pagesUnderstanding Induction MotorsKimsairng CheaNo ratings yet
- Synchronous Machines and SCDocument6 pagesSynchronous Machines and SCivancho04mNo ratings yet
- Electric Machinery FundamentalsDocument6 pagesElectric Machinery FundamentalsKashyap Dubey0% (1)
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its TypessasidaranNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Why Static ExcitationDocument15 pagesWhy Static ExcitationMohamed RashidNo ratings yet
- Parallel Operation With A Network SystemDocument27 pagesParallel Operation With A Network Systemsaulcastano6556100% (3)
- 11 Power System Stability PDFDocument23 pages11 Power System Stability PDFvgarudaNo ratings yet
- Motor ProtectionDocument33 pagesMotor ProtectionMohamed RashidNo ratings yet
- Digital Excitation TechnologyDocument11 pagesDigital Excitation TechnologyMohamed RashidNo ratings yet
- Basic GoverningDocument24 pagesBasic GoverningMohamed RashidNo ratings yet
- Intro SynchDocument21 pagesIntro SynchMohamed RashidNo ratings yet
- Distributed GenerationDocument14 pagesDistributed GenerationMohamed RashidNo ratings yet
- Closed Loop SystemsDocument11 pagesClosed Loop SystemsMohamed RashidNo ratings yet
- How To Implement Maintenance Planning & SchedulingDocument18 pagesHow To Implement Maintenance Planning & SchedulingIrete FemiNo ratings yet
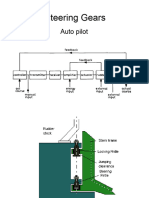
- Steering GearsDocument34 pagesSteering GearsMohamed RashidNo ratings yet
- Manufacturer Data Sheet for BHT-206L4 Helicopter SystemsDocument84 pagesManufacturer Data Sheet for BHT-206L4 Helicopter SystemsRaisa RabeyaNo ratings yet
- Case IH Schematic HYDRAULIC 6-12830 MX210 MX230 MX255 MX285 PDFDocument2 pagesCase IH Schematic HYDRAULIC 6-12830 MX210 MX230 MX255 MX285 PDFgregfortkampNo ratings yet
- Diagrama Electrico Cat D11Document2 pagesDiagrama Electrico Cat D11rodolfof_31100% (3)
- Ford EATC Self DiagnosticsDocument1 pageFord EATC Self Diagnosticsvilmantas84No ratings yet
- High Quality Product Supplier Product Catalog: Cylinder Liner Liner Kit Piston Piston Ring Gasket Kit Crankshaft CamshaftDocument23 pagesHigh Quality Product Supplier Product Catalog: Cylinder Liner Liner Kit Piston Piston Ring Gasket Kit Crankshaft Camshaft符晓婷No ratings yet
- Fine Boring & Jig BoringDocument12 pagesFine Boring & Jig Boringshiva100% (1)
- Automatic Transmission Overhaul GuideDocument62 pagesAutomatic Transmission Overhaul GuideDERLIS RAMIREZ100% (2)
- Mooney M20 100hour PDFDocument2 pagesMooney M20 100hour PDFsplyn100% (1)
- 24 Ford EE New HollandDocument239 pages24 Ford EE New HollandJohn Mendoza PachecoNo ratings yet
- Kohler KDI 1903 and 2504 Engine Service PartsDocument204 pagesKohler KDI 1903 and 2504 Engine Service PartsKaddachiSayedNo ratings yet
- Lamaran NongyiDocument12 pagesLamaran NongyiTonoTonyNo ratings yet
- VOLVO 240 SECT. 2 - ENGINE d20 d24 - Repairs Part 2Document96 pagesVOLVO 240 SECT. 2 - ENGINE d20 d24 - Repairs Part 2Myselvf100% (1)
- Factory carburetor setups for GM big and small blocksDocument29 pagesFactory carburetor setups for GM big and small blocksFranziska Kujumdshiev100% (1)
- Generators Portable Supersilent DCA40SSI Rev 0 Final ManualDocument140 pagesGenerators Portable Supersilent DCA40SSI Rev 0 Final ManualЕвгений Иванов100% (1)
- Mantto Torreta CNCDocument1 pageMantto Torreta CNCaldoNo ratings yet
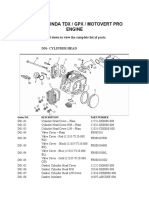
- Parts of Motorcycle EngineDocument12 pagesParts of Motorcycle EngineRj Saneubac Guhabac100% (1)
- VCR Multi FuelDocument5 pagesVCR Multi FuelAshish VermaNo ratings yet
- Service Manual Buses: Wiring Diagram B9R, CHID 322002Document76 pagesService Manual Buses: Wiring Diagram B9R, CHID 322002MAJID SADEGHIAN83% (6)
- Tip Speed Ratio PmaDocument5 pagesTip Speed Ratio PmaMichele OconnorNo ratings yet
- Mud Pump TQB PartslistDocument28 pagesMud Pump TQB PartslistluisedonossaNo ratings yet
- Industrial Resources, Inc.: Solar Taurus 60 Gas TurbineDocument28 pagesIndustrial Resources, Inc.: Solar Taurus 60 Gas TurbineIsabel PaixaoNo ratings yet
- IC Engine Performance ParametersDocument2 pagesIC Engine Performance ParametersSunny BhatiaNo ratings yet
- Heat Pipe in AHUDocument2 pagesHeat Pipe in AHUjimmiilongNo ratings yet
- Inspecting and Replacing Poly-V-BeltsDocument13 pagesInspecting and Replacing Poly-V-BeltsGuillem Sabate GoulaNo ratings yet
- Containers Data 2022 - CPP QRT ProjectDocument86 pagesContainers Data 2022 - CPP QRT ProjectNizaModdinNo ratings yet
- Parts Catalogue For Coolcar A PDFDocument144 pagesParts Catalogue For Coolcar A PDFJavier Amorin100% (1)
- 094fe398236d3d0a-03000EN TCM 12-595611Document204 pages094fe398236d3d0a-03000EN TCM 12-595611Solomon NebiyuNo ratings yet
- Service KitDocument2 pagesService Kiteshopmanual limaNo ratings yet
- Evolution BrochureDocument4 pagesEvolution Brochurelucas28031978No ratings yet
- Fire Pump Installation RequirementsDocument48 pagesFire Pump Installation Requirementsczds6594No ratings yet