You might also like
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- 1.3. Linear Combination of Vectors-Students'Document3 pages1.3. Linear Combination of Vectors-Students'YashuNo ratings yet
- Solution 1Document12 pagesSolution 1benmenceur.kaissaNo ratings yet
- Lecture 4 - LADocument5 pagesLecture 4 - LARafat Hasan DipuNo ratings yet
- L10 L12Document4 pagesL10 L12Luise FangNo ratings yet
- Mat5011 - Digital Assignment 2Document2 pagesMat5011 - Digital Assignment 2YANDRAPU MANOJ NAIDU 20MDT1017No ratings yet
- Week 2 Cross Product Line and Plane in 3-SpaceDocument4 pagesWeek 2 Cross Product Line and Plane in 3-SpaceBirru Asia RayaniNo ratings yet
- Vector Space AssignmentDocument1 pageVector Space AssignmentSaumya GurnaniNo ratings yet
- Topic 5 Linear Combination Linear Dependence Spanning, Orthogonal-WordDocument12 pagesTopic 5 Linear Combination Linear Dependence Spanning, Orthogonal-Wordwendykuria3No ratings yet
- Assignment 4 Answers Math 130 Linear AlgebraDocument3 pagesAssignment 4 Answers Math 130 Linear AlgebraCody SageNo ratings yet
- Vector Space - Unit IDocument81 pagesVector Space - Unit IShubhaNo ratings yet
- Assignment 2Document2 pagesAssignment 2RAHUL DHANOLANo ratings yet
- MATH101 7 Vector SpacesDocument34 pagesMATH101 7 Vector SpacesSalvacion BandoyNo ratings yet
- Department of Mathematics and StatisticsDocument2 pagesDepartment of Mathematics and StatisticsSanjay KumarNo ratings yet
- 2024-02-20 MA110 Slides CompilationDocument62 pages2024-02-20 MA110 Slides CompilationmayankspareNo ratings yet
- Determinant and Adjoint of Fuzzy Neutrosophic Soft MatricesDocument17 pagesDeterminant and Adjoint of Fuzzy Neutrosophic Soft MatricesMia AmaliaNo ratings yet
- Chapter 4 Vector Spaces - Part 2Document31 pagesChapter 4 Vector Spaces - Part 2Aqeel AbqariNo ratings yet
- Applied Mathematics - 1 - 241221155013Document70 pagesApplied Mathematics - 1 - 241221155013girum sisayNo ratings yet
- Linear Algebra (Lec - 13) Real Vector SpacesDocument6 pagesLinear Algebra (Lec - 13) Real Vector SpacesSamiul LesumNo ratings yet
- Interval Gauss-Seidel Method For Generalized Solution Sets To Interval Linear SystemsDocument16 pagesInterval Gauss-Seidel Method For Generalized Solution Sets To Interval Linear SystemsOsoesantoYusufNurFathoniNo ratings yet
- 1.2 Vector Space : Introduction To VectorsDocument15 pages1.2 Vector Space : Introduction To VectorsVineetha LekkalaNo ratings yet
- Model Answer of Quiz (2 - C) Fall 2023Document1 pageModel Answer of Quiz (2 - C) Fall 2023Anas EldenNo ratings yet
- Unit-3 MatricesDocument43 pagesUnit-3 Matricesstanygregor87No ratings yet
- Arrays and MatricesDocument43 pagesArrays and MatricesMarian CelesteNo ratings yet
- Unit I: Matrices-I: Lecture No. 4 Linear Independent/Linear DependentDocument18 pagesUnit I: Matrices-I: Lecture No. 4 Linear Independent/Linear Dependentsatyajit ataleNo ratings yet
- Echelon Form of A MatrixDocument41 pagesEchelon Form of A MatrixJinky CanitanNo ratings yet
- Linear Algebra Assignment 02: Jing-Zhong Pan Department: Information Management ID: 109403027 Date: Oct. 16, 2021Document3 pagesLinear Algebra Assignment 02: Jing-Zhong Pan Department: Information Management ID: 109403027 Date: Oct. 16, 202120644潘敬中No ratings yet
- Matrix-Based RSA Encryption of Streaming Data Prendergast 20210804Document15 pagesMatrix-Based RSA Encryption of Streaming Data Prendergast 20210804Mohammed Nadeemullah NNo ratings yet
- 01 Method of Proof, Notations, Vector Spaces, and MatricesDocument8 pages01 Method of Proof, Notations, Vector Spaces, and MatricesTMRendy Zacky FernandaNo ratings yet
- Sheet 2 Vector Space - Subspace Linear Combination - Linear Dependency Span SetDocument4 pagesSheet 2 Vector Space - Subspace Linear Combination - Linear Dependency Span SetMohamed AlfarashNo ratings yet
- ECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounDocument23 pagesECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounKen ZhengNo ratings yet
- Publishable PaperDocument15 pagesPublishable Paperrikaseo rikaNo ratings yet
- Assignment 2Document3 pagesAssignment 2tiwarigarima811No ratings yet
- Lesson 6 - Language of Relations and FunctionsDocument7 pagesLesson 6 - Language of Relations and FunctionsriniNo ratings yet
- Applied1-Unit1 - vectors-2011ECDocument33 pagesApplied1-Unit1 - vectors-2011ECTadesseNo ratings yet
- ps2 PDFDocument1 pageps2 PDFSubhamKumarNo ratings yet
- Simulink Modelling of The Transient CaseDocument39 pagesSimulink Modelling of The Transient CaseMUSAIB UL FAYAZ 2022 17No ratings yet
- Am1 Ex3Document3 pagesAm1 Ex3CH YNo ratings yet
- Problem List Discrete MathematicsDocument4 pagesProblem List Discrete MathematicsAbdul mannanNo ratings yet
- 1.2-4 Set Theory, Relations Functions, Coordinate SystemDocument14 pages1.2-4 Set Theory, Relations Functions, Coordinate System七海未来No ratings yet
- Some Results of Non-Coprime Graph of The Dihedral Group FOR: A Prime PowerDocument4 pagesSome Results of Non-Coprime Graph of The Dihedral Group FOR: A Prime PowerArmee JustitiaNo ratings yet
- Study Guide - Real Analysis - Chapter 2 (Measurable Functions)Document12 pagesStudy Guide - Real Analysis - Chapter 2 (Measurable Functions)Patricia MislangNo ratings yet
- Hints, Comments, Advises, Solutions, and AnswersDocument76 pagesHints, Comments, Advises, Solutions, and AnswersAngelito MogollonNo ratings yet
- Vector Space-Notes - Linear CombinationsDocument12 pagesVector Space-Notes - Linear CombinationsShubhaNo ratings yet
- Math BookDocument160 pagesMath BookDonovan WrightNo ratings yet
- Chapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsDocument10 pagesChapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsMohamed MuayidNo ratings yet
- Tutorial 5Document4 pagesTutorial 5NUR ADRIANA FARIESYA BINTI MOHD RIZAIMINo ratings yet
- Lecture 8 Com 1033Document35 pagesLecture 8 Com 1033Shaden Shg100% (1)
- On The Distance Pattern Distinguishing Number of A GraphDocument9 pagesOn The Distance Pattern Distinguishing Number of A GraphSoumik SinhaNo ratings yet
- Lecture2 PDFDocument5 pagesLecture2 PDFAnonymous ewKJI4xUNo ratings yet
- 5 Matrix Form of Linear Transformations, Column and Row Space of A MatrixDocument19 pages5 Matrix Form of Linear Transformations, Column and Row Space of A MatrixKaveesha JayasuriyaNo ratings yet
- Answer: (: Vector V (A, B, C) As A Linear Combination of The Basis Vectors From BDocument1 pageAnswer: (: Vector V (A, B, C) As A Linear Combination of The Basis Vectors From BpranayNo ratings yet
- CE531 Lecture 1 - 2020 - v1 PDFDocument12 pagesCE531 Lecture 1 - 2020 - v1 PDFPablo123No ratings yet
- Laurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakDocument18 pagesLaurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakJohn100% (1)
- Series de TaylorDocument26 pagesSeries de TaylorRicardo OrtegaNo ratings yet
- Am1 Ex4Document3 pagesAm1 Ex4CH YNo ratings yet
- Vasin 2020Document7 pagesVasin 2020Chatchawan PanraksaNo ratings yet
- SdarticleDocument9 pagesSdarticleSachin KumarNo ratings yet
- Solar Radiation Model: L.T. Wong, W.K. ChowDocument34 pagesSolar Radiation Model: L.T. Wong, W.K. ChowSubhash ChandNo ratings yet
- Lecture 3 Bilinear TFDocument32 pagesLecture 3 Bilinear TFNathan KingoriNo ratings yet
- CP LAB1 Problem SolvingDocument11 pagesCP LAB1 Problem SolvingFaizanAminNo ratings yet
- Manual For Instructors: TO Linear Algebra Fifth EditionDocument7 pagesManual For Instructors: TO Linear Algebra Fifth EditioncemreNo ratings yet
- SAMPLE - Shear Force and Bending Moment Influence LinesDocument39 pagesSAMPLE - Shear Force and Bending Moment Influence LinesSammi YongNo ratings yet
- Phy C332 167Document2 pagesPhy C332 167Yuvraaj KumarNo ratings yet
- 01 Thermal ExpansionDocument9 pages01 Thermal ExpansionCelphy TrimuchaNo ratings yet
- Simple Solutions TopicsDocument3 pagesSimple Solutions Topicsapi-344050382No ratings yet
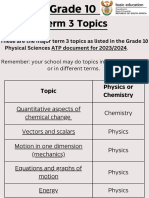
- Grade 10 Term 3 TopicsDocument10 pagesGrade 10 Term 3 TopicsOwamiirh RsaNo ratings yet
- CTSH - Technical Bulletin 97-1Document4 pagesCTSH - Technical Bulletin 97-1hesigu14No ratings yet
- EENG (INFE) 115 F16-17 Final Exam-SOLUTIONSDocument9 pagesEENG (INFE) 115 F16-17 Final Exam-SOLUTIONSTeki ChweNo ratings yet
- Peter Maandag 3047121 Solving 3-Sat PDFDocument37 pagesPeter Maandag 3047121 Solving 3-Sat PDFVibhav JoshiNo ratings yet
- Intro MUSSVDocument4 pagesIntro MUSSVMohammad Naser HashemniaNo ratings yet
- Digital SAT Tests MATH Explanation (Mr. Amr Mustafa)Document196 pagesDigital SAT Tests MATH Explanation (Mr. Amr Mustafa)mr.samirjon.07No ratings yet
- Bonus LectureDocument13 pagesBonus Lectureminuch00newsNo ratings yet
- Immediate InferenceDocument56 pagesImmediate InferenceEdgardoNo ratings yet
- AyazDocument17 pagesAyazAnsar NiazNo ratings yet
- Problems Analysis and EOS 2011-1Document2 pagesProblems Analysis and EOS 2011-1Jenny CórdobaNo ratings yet
- Chapter 14 1Document83 pagesChapter 14 1Юлия КириченкоNo ratings yet
- Numerical Methods in EconomicsDocument349 pagesNumerical Methods in EconomicsJuanfer Subirana Osuna0% (1)
- Gamma and Beta Function - Spring 21-22Document23 pagesGamma and Beta Function - Spring 21-22Jamiul HasanNo ratings yet
- Solutionsfor Uniformly Accelerated Motion Problems Worksheets CH 6Document3 pagesSolutionsfor Uniformly Accelerated Motion Problems Worksheets CH 6Abreham GirmaNo ratings yet
- A Handbook of Mathematical Mode - Dr. Ranja SarkerDocument232 pagesA Handbook of Mathematical Mode - Dr. Ranja SarkerJohn100% (1)
- List - Assignment 1.1Document2 pagesList - Assignment 1.1Pham Nguyen Thien Chuong K16 DNNo ratings yet
- CBLM SketchingDocument18 pagesCBLM SketchingGlenn F. Salandanan100% (3)
- CIVN3001-FINAL REPORT ... MDocument20 pagesCIVN3001-FINAL REPORT ... MThabiso MotalingoaneNo ratings yet
- Image Processing-Ch4 - Part 1Document63 pagesImage Processing-Ch4 - Part 1saifNo ratings yet
- SCM - Session 8 (Forecasting)Document21 pagesSCM - Session 8 (Forecasting)Bushra Mubeen SiddiquiNo ratings yet
- Introduction To Solid Mechanics 2Document18 pagesIntroduction To Solid Mechanics 2Şħäиtħä ӃumǻяNo ratings yet