You might also like
- Laplace Transform - Tutorial PDFDocument2 pagesLaplace Transform - Tutorial PDFShreyansh ShethNo ratings yet
- Partial GDocument50 pagesPartial GnemaderakeshNo ratings yet
- Inverse Laplace Transform 5.1: FT Fs F S Is DefinedDocument10 pagesInverse Laplace Transform 5.1: FT Fs F S Is DefinedChong Hou YINo ratings yet
- Unit 1 Laplace Transforms 2marksDocument5 pagesUnit 1 Laplace Transforms 2marksSudersan BalajiNo ratings yet
- Advanced Engineering Mathematics: Laplace TransformDocument20 pagesAdvanced Engineering Mathematics: Laplace TransformAndenet AshagrieNo ratings yet
- Unit-Iv-Laplace TransformDocument19 pagesUnit-Iv-Laplace TransformCurious ManNo ratings yet
- University of Trinidad and Tobago: MATH1002Document2 pagesUniversity of Trinidad and Tobago: MATH1002DavidNo ratings yet
- Forumlario TransformadaDocument8 pagesForumlario TransformadaJOSUE REYDECEL MEDINA DEHUMANo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and PropertiesYoussef MohamedNo ratings yet
- Assignment Laplace TransformDocument2 pagesAssignment Laplace TransformSatvik YelluriNo ratings yet
- Information Storage and Management, 2nd EditionDocument2 pagesInformation Storage and Management, 2nd Editiongayathri gayathriNo ratings yet
- Laplace TransformDocument1 pageLaplace TransformCristian GrajalesNo ratings yet
- Inverse Laplace20Document54 pagesInverse Laplace20Sabrina SaimaNo ratings yet
- Differential Equations: 15SCIB02C Laplace Transforms and Laplace Inverse With ApplicationsDocument11 pagesDifferential Equations: 15SCIB02C Laplace Transforms and Laplace Inverse With ApplicationsJohn LoydNo ratings yet
- Chapter2 PartBDocument21 pagesChapter2 PartBAmin AlshamaliNo ratings yet
- TabelaDocument2 pagesTabelaLaraNo ratings yet
- Laplace and Fourier TransformDocument47 pagesLaplace and Fourier TransformAnish PandeyNo ratings yet
- Unit 3 - Laplace TransformsDocument42 pagesUnit 3 - Laplace TransformsjjamunagandhiNo ratings yet
- Quiz 3 - : SolutionDocument2 pagesQuiz 3 - : SolutionRiley mooreoNo ratings yet
- LT3 Solving Differential EquationsDocument4 pagesLT3 Solving Differential Equationssujayan2005No ratings yet
- Laplace Transform ExplainedDocument33 pagesLaplace Transform Explainedsr samieNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and Propertiesahmed belalNo ratings yet
- Advanced Math 2Document4 pagesAdvanced Math 2Anonymous flP4bZ4ONo ratings yet
- Inverse Laplace Transform Using Rule 20Document10 pagesInverse Laplace Transform Using Rule 20Matone MafologelaNo ratings yet
- Tabela Laplace AtualDocument2 pagesTabela Laplace AtualTumblr BoyNo ratings yet
- Formula Sheet: Useful Trigonometric IdentitiesDocument3 pagesFormula Sheet: Useful Trigonometric Identitieslp110No ratings yet
- MA6251 Mathematics II Notes Regulation 2013 2nd Semester Notes Maths 2 Notes M2 Notes Lecture Notes Subject Notes - 10th 12th Time Table 2018 - Regulation 2017 Syllabus Notes Collections - 3Document5 pagesMA6251 Mathematics II Notes Regulation 2013 2nd Semester Notes Maths 2 Notes M2 Notes Lecture Notes Subject Notes - 10th 12th Time Table 2018 - Regulation 2017 Syllabus Notes Collections - 3XaviFernando0% (1)
- LAPLACE TRANSFORMS AND SOLVING DIFFERENTIAL EQUATIONS WITH NON-STANDARD FUNCTIONSDocument4 pagesLAPLACE TRANSFORMS AND SOLVING DIFFERENTIAL EQUATIONS WITH NON-STANDARD FUNCTIONSkinfeNo ratings yet
- Unit-3 Engineering Mathematics-II Laplace Transform and Its ApplicationsDocument7 pagesUnit-3 Engineering Mathematics-II Laplace Transform and Its ApplicationsAnirudh MittalNo ratings yet
- Circuit Analysis Using Laplace TransformDocument41 pagesCircuit Analysis Using Laplace TransformhibaNo ratings yet
- Home Assignments #1 - SolDocument4 pagesHome Assignments #1 - SolMike RossNo ratings yet
- Laplace Transform TableDocument3 pagesLaplace Transform TableHafidhul AlimNo ratings yet
- Laplace TransformDocument2 pagesLaplace TransformTanishqNo ratings yet
- Lecture (1) MVCSDocument21 pagesLecture (1) MVCSTelal MohammedNo ratings yet
- Unit 4 - Mathematics III - WWW - Rgpvnotes.inDocument30 pagesUnit 4 - Mathematics III - WWW - Rgpvnotes.inK2 CREATIONNo ratings yet
- Chap 3 Laplace Transform FOC AssignmentDocument6 pagesChap 3 Laplace Transform FOC AssignmentdudescapeNo ratings yet
- XT e E: 1. (A) and (B)Document19 pagesXT e E: 1. (A) and (B)Anonymous 0MQ3zRNo ratings yet
- Laplace Transform Translation TheoremsDocument28 pagesLaplace Transform Translation TheoremsHarith AsyrafNo ratings yet
- Angle Is The Angle That The String Makes With The Vertical When Released From Rest Will Affect TheDocument8 pagesAngle Is The Angle That The String Makes With The Vertical When Released From Rest Will Affect TheHidayah SakinahNo ratings yet
- Part 3 - Lccde by Laplace TransformDocument41 pagesPart 3 - Lccde by Laplace Transformandrew brownNo ratings yet
- Chapter 15 PP PDFDocument7 pagesChapter 15 PP PDFSumit CerejoNo ratings yet
- LAPLACE TRANSFORM FORMULASDocument32 pagesLAPLACE TRANSFORM FORMULASShaktiprakashforever M2No ratings yet
- LAplace TableDocument3 pagesLAplace TableKotobe 1No ratings yet
- Exercise - Laplace TransformDocument2 pagesExercise - Laplace Transformzul hilmiNo ratings yet
- Laplace DonusumuDocument4 pagesLaplace DonusumuAlyakut IbrahimNo ratings yet
- Standard Laplace Transforms TableDocument2 pagesStandard Laplace Transforms TablemeloNo ratings yet
- Chapter 3.3 - Formula - Laplace TransformDocument3 pagesChapter 3.3 - Formula - Laplace TransformEncik MaaNo ratings yet
- Sheet 2Document1 pageSheet 2ahmed belalNo ratings yet
- Inverse Laplace TransormDocument12 pagesInverse Laplace Transormchiranthan123456789No ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceThiago LiãoNo ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceDorivaldo Sebasti�o Gomes 20190511No ratings yet
- M3Document15 pagesM3ajay.rocks ajay.rocksNo ratings yet
- Transformada de Laplace y funciones elementalesDocument1 pageTransformada de Laplace y funciones elementaleselvisNo ratings yet
- Laplace Transform Properties and TechniquesDocument20 pagesLaplace Transform Properties and TechniquesdhineshNo ratings yet
- Tutorial 8 - Laplace T - ADTP 4 - NCB 10303Document4 pagesTutorial 8 - Laplace T - ADTP 4 - NCB 10303Ibrahim YahyaNo ratings yet
- Unit 4 - Mathematics III - WWW - Rgpvnotes.inDocument43 pagesUnit 4 - Mathematics III - WWW - Rgpvnotes.inbosoho4313No ratings yet
- Lista 1Document2 pagesLista 1Dionatan Felipe FerreiraNo ratings yet
- Practice 5 (Solution) : M T F KX DT DX DT X D M T X DT X DDocument2 pagesPractice 5 (Solution) : M T F KX DT DX DT X D M T X DT X DckithoNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- PPM Rebuild Unit Manual: Testing MethodDocument17 pagesPPM Rebuild Unit Manual: Testing MethodNGUYENTHEPHAT100% (1)
- تقرير التوالي والتوازي (1) -2-17Document16 pagesتقرير التوالي والتوازي (1) -2-17sdymabw94No ratings yet
- Product Information: Vegaswing 51 Vegaswing 61 Vegaswing 63Document28 pagesProduct Information: Vegaswing 51 Vegaswing 61 Vegaswing 63muhammad tariqNo ratings yet
- EV 100 Service Manual PDFDocument31 pagesEV 100 Service Manual PDFDmitriy Shevchenko100% (1)
- Tower AccessoriesDocument2 pagesTower AccessoriesmulualemNo ratings yet
- Rds No. Standard Elementary System Size Pressure (Bar (G) )Document36 pagesRds No. Standard Elementary System Size Pressure (Bar (G) )Amit SharmaNo ratings yet
- Lab Experiments and FEA (2021)Document7 pagesLab Experiments and FEA (2021)soumyaNo ratings yet
- Lab Manual Microbiology For Allied Health Students 1.3Document115 pagesLab Manual Microbiology For Allied Health Students 1.3IconMaicoNo ratings yet
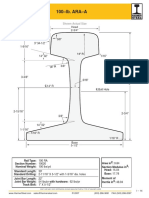
- 100 Lb-Yd ARA-ADocument1 page100 Lb-Yd ARA-ADario Bravo BordaNo ratings yet
- Brain Organization and Neuroscience ConceptsDocument2 pagesBrain Organization and Neuroscience ConceptsKelLYSNo ratings yet
- Oil Grease PumpDocument68 pagesOil Grease PumpedgarNo ratings yet
- Engineering Standards FOR Units Original Edition AUG. 1993: IPS-E-GN-100Document81 pagesEngineering Standards FOR Units Original Edition AUG. 1993: IPS-E-GN-100Pouya ZakerabbasiNo ratings yet
- Physics137a sp2004 mt2 Hardtke Soln PDFDocument3 pagesPhysics137a sp2004 mt2 Hardtke Soln PDFHawtShawtNo ratings yet
- Oxford Six Class Science NotesDocument15 pagesOxford Six Class Science NotesLisha92% (12)
- Merald Technology SolutionsDocument24 pagesMerald Technology SolutionsAngela WyattNo ratings yet
- WEG Brake Motor Instruction Manual For Installation Operation and Maintenance of Brake Motors 50021973 Brochure English Spanish WebDocument2 pagesWEG Brake Motor Instruction Manual For Installation Operation and Maintenance of Brake Motors 50021973 Brochure English Spanish WebLuis angel RamirezNo ratings yet
- Polyglycolic Acid (PGA) Resin: Superior Barrier PerformanceDocument2 pagesPolyglycolic Acid (PGA) Resin: Superior Barrier PerformanceiyerpadmaNo ratings yet
- Development of Graphitic Carbon NitrideDocument64 pagesDevelopment of Graphitic Carbon NitrideKoorosh IraniNo ratings yet
- Techsheet ZerowasteDocument2 pagesTechsheet ZerowastesunillimayeNo ratings yet
- Geometric Design Chapter SummaryDocument90 pagesGeometric Design Chapter SummaryANup GhiMire100% (1)
- 12SP Frames and Machines SampleProblemsDocument20 pages12SP Frames and Machines SampleProblemsSebastiàn RugelesNo ratings yet
- Syllabus KEE101TDocument1 pageSyllabus KEE101TDr. Abhishek MishraNo ratings yet
- Pros & Cons of Centralized Vacuum SystemsDocument66 pagesPros & Cons of Centralized Vacuum SystemsDjapaNo ratings yet
- Design File Type RUBDocument116 pagesDesign File Type RUBAbilaash VNo ratings yet
- Surface Equation Surface Equation Ellipsoid Cone: Z C X A y B A ! B ! C X A y B Z CDocument1 pageSurface Equation Surface Equation Ellipsoid Cone: Z C X A y B A ! B ! C X A y B Z CNaomy Zeledón RiveraNo ratings yet
- Phase Plane Analysis PDFDocument27 pagesPhase Plane Analysis PDFjooooooNo ratings yet
- Analog Servo Drive System PDFDocument6 pagesAnalog Servo Drive System PDFZeljko BorkovicNo ratings yet
- Me 27 Ef - Fluid Mechanics/Hydraulics: W V m γ= mg ρg mDocument67 pagesMe 27 Ef - Fluid Mechanics/Hydraulics: W V m γ= mg ρg mJoseph NjugunaNo ratings yet
- 05-01-2023_Sr.Super60_NUCLEUS & ALL_BT_Jee-Main-GTM-02-First Year Syllabus_Q.PAPERDocument18 pages05-01-2023_Sr.Super60_NUCLEUS & ALL_BT_Jee-Main-GTM-02-First Year Syllabus_Q.PAPERVatsa RachuriNo ratings yet
- OPSS 791 Nov2014Document6 pagesOPSS 791 Nov2014Muhammad UmarNo ratings yet