You might also like
- Lectuer 8. Rheology.. PDFDocument21 pagesLectuer 8. Rheology.. PDFHassan mohamad Al-bayateNo ratings yet
- RheologyDocument118 pagesRheologyMuhammad HusnainNo ratings yet
- 1.3 Newton's Law of Viscosity and RheologyDocument51 pages1.3 Newton's Law of Viscosity and RheologyfamiliarityNo ratings yet
- Dr. Abitha Note 1Document36 pagesDr. Abitha Note 1Alkesh KNo ratings yet
- CHEM 210 IR SpectrosDocument50 pagesCHEM 210 IR SpectrosHafiz Shoaib SarwarNo ratings yet
- Rhe OlogyDocument48 pagesRhe OlogyAhmed ImranNo ratings yet
- Unit 2 Part 1 PhysicalDocument33 pagesUnit 2 Part 1 PhysicalRenuNo ratings yet
- Fundamentals of Fluid Mechanics: 7328 - C001.fm Page 3 Friday, October 6, 2006 3:48 PMDocument44 pagesFundamentals of Fluid Mechanics: 7328 - C001.fm Page 3 Friday, October 6, 2006 3:48 PMroseNo ratings yet
- Chapter One: Fundamental Concepts inDocument29 pagesChapter One: Fundamental Concepts inNizar AliNo ratings yet
- ViscosityDocument5 pagesViscositydwarika2006No ratings yet
- Medical Physical ReportDocument4 pagesMedical Physical Reportمحمود محمدNo ratings yet
- Newtonian Fluid - WikipediaDocument5 pagesNewtonian Fluid - Wikipediaamit kumar guptaNo ratings yet
- Rhe OlogyDocument19 pagesRhe Ologysireesha.greenNo ratings yet
- Aliran Ideal Dan RiilDocument27 pagesAliran Ideal Dan RiilYogi InsanNo ratings yet
- FM 1Document42 pagesFM 1Javiier Abarca MoralesNo ratings yet
- 05.fluid DynamicsDocument26 pages05.fluid DynamicsDRAGON LAMNo ratings yet
- Chapter 1 Introduction To Fluid MechanicsDocument9 pagesChapter 1 Introduction To Fluid MechanicsRavindu JayalathNo ratings yet
- Indian Institute of Technology Guwahati: Fluid MechanicsDocument16 pagesIndian Institute of Technology Guwahati: Fluid MechanicsForam ParekhNo ratings yet
- Rheology PresentationDocument31 pagesRheology Presentationanjaneya mishraNo ratings yet
- Rheology: By: Physical Pharmacy TeamDocument48 pagesRheology: By: Physical Pharmacy TeamSuratiNo ratings yet
- Newtonian Fluids PDFDocument5 pagesNewtonian Fluids PDFengineer bilalNo ratings yet
- RHEOLOGYDocument39 pagesRHEOLOGYraju niraulaNo ratings yet
- CH-1 Properties of Fluids: at Rest or in MotionDocument15 pagesCH-1 Properties of Fluids: at Rest or in MotionDev KaharNo ratings yet
- CVE 303 Fluid Mechanics-1Document20 pagesCVE 303 Fluid Mechanics-1Samuel Oluwaseun OlatunjiNo ratings yet
- CVE 303 Fluid MechanicsDocument8 pagesCVE 303 Fluid MechanicsSamuel Oluwaseun OlatunjiNo ratings yet
- An Introduction To Rheology. BarnesDocument10 pagesAn Introduction To Rheology. Barnesostz albanNo ratings yet
- Visco-Handbook 2015 2.7-MB PDF-EnglishDocument92 pagesVisco-Handbook 2015 2.7-MB PDF-EnglishThorieForestNo ratings yet
- Covenant University Nigeria: Tutorial Kit Omega SemesterDocument21 pagesCovenant University Nigeria: Tutorial Kit Omega SemesterthareendaNo ratings yet
- Viscosity MeasurementDocument20 pagesViscosity MeasurementMohit Awasthi100% (1)
- Unit 1 Day 3 Class NotesDocument13 pagesUnit 1 Day 3 Class NotesSiddi Sampath Kumar ReddyNo ratings yet
- Open MindedDocument10 pagesOpen Mindedhs.hs0011No ratings yet
- Ch2 Fundamental ConceptsDocument62 pagesCh2 Fundamental ConceptsDavid RiveraNo ratings yet
- FM Full CourseDocument360 pagesFM Full CourseVish ThakurNo ratings yet
- Lec. 7 RheologyDocument30 pagesLec. 7 RheologyMuaviya Mughal100% (3)
- Chapter One 1.1Document16 pagesChapter One 1.1Okechukwu JonnwakaloNo ratings yet
- ViscosityDocument20 pagesViscosityOnur CelikkanNo ratings yet
- 2 TP (2m+16m) PDFDocument218 pages2 TP (2m+16m) PDFIlayaraja MarimuthuNo ratings yet
- Chap2 Viscosity and Normal Stress DifferenceDocument30 pagesChap2 Viscosity and Normal Stress DifferenceAzizol WahabNo ratings yet
- Viscosity ReportDocument12 pagesViscosity ReportBF3nobelNo ratings yet
- Transport Phenomena: Dr. Taqi Mehran Scme, Nust Taqimehran@scme - Nust.edu - PKDocument60 pagesTransport Phenomena: Dr. Taqi Mehran Scme, Nust Taqimehran@scme - Nust.edu - PKHadi SiddiqiNo ratings yet
- ET6018 Lecture 1 Fluid IntroDocument16 pagesET6018 Lecture 1 Fluid IntrolishadNo ratings yet
- FMM QBDocument25 pagesFMM QBrkumaravelanNo ratings yet
- Ch8791 Transport PhenomenaDocument150 pagesCh8791 Transport PhenomenarathiNo ratings yet
- Properties of FluidDocument12 pagesProperties of FluidEIGUEDO RICHARDNo ratings yet
- Fluid Mechanics Jkchrome ComDocument107 pagesFluid Mechanics Jkchrome Comuvraj1234567891No ratings yet
- L2 - Fluid Mechanics - I - 1Document19 pagesL2 - Fluid Mechanics - I - 1shamiul himelNo ratings yet
- Practical Work 6Document11 pagesPractical Work 6Achraf RabadiNo ratings yet
- RheologyDocument99 pagesRheologyFuzenn0% (1)
- Gupta and GuptaDocument15 pagesGupta and GuptaStacy WilsonNo ratings yet
- Rhe OlogyDocument12 pagesRhe OlogyVictor MachariaNo ratings yet
- TP QBDocument27 pagesTP QBjelike5485No ratings yet
- Unit 5: RheologyDocument71 pagesUnit 5: RheologySundar SkNo ratings yet
- Notes of LessonDocument52 pagesNotes of LessonRichards Ðånte WisdomNo ratings yet
- RheologyDocument63 pagesRheologyJorge Reyes100% (1)
- Backbone MaterialsDocument28 pagesBackbone Materialsespinosa_mra978No ratings yet
- Solutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsFrom EverandSolutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsNo ratings yet
- Asymptotic Theory of Supersonic Viscous Gas FlowsFrom EverandAsymptotic Theory of Supersonic Viscous Gas FlowsVladimir NeylandNo ratings yet
- Liquid Glass Transition: A Unified Theory From the Two Band ModelFrom EverandLiquid Glass Transition: A Unified Theory From the Two Band ModelNo ratings yet
- Heterocyciccompound Furan 200619050341Document25 pagesHeterocyciccompound Furan 200619050341parmarkeval1610No ratings yet
- New Heterocyclic ChemistryDocument259 pagesNew Heterocyclic Chemistryparmarkeval1610No ratings yet
- Pharmaceutical Juriseprudence: Unit:IDocument2 pagesPharmaceutical Juriseprudence: Unit:Iparmarkeval1610No ratings yet
- New StereochemistryDocument232 pagesNew Stereochemistryparmarkeval1610No ratings yet
- Geometric IsomerismDocument68 pagesGeometric IsomerismRx Nadeem ChhipaNo ratings yet
- Drug Metabolism Phase2Document1 pageDrug Metabolism Phase2parmarkeval1610No ratings yet
- Drug Metabolism Phase1Document1 pageDrug Metabolism Phase1parmarkeval1610No ratings yet
- Koppal BrochureDocument19 pagesKoppal BrochureIssac EbbuNo ratings yet
- Safety Relief Valve: MODEL AL-150 Series and AL-140 SeriesDocument11 pagesSafety Relief Valve: MODEL AL-150 Series and AL-140 SeriesTran Quoc Thinh - M&ENo ratings yet
- 2014 - 001 Introduction To House PlumbingDocument16 pages2014 - 001 Introduction To House PlumbingRon Julienne RebugioNo ratings yet
- Effect of Axial Gap Between Inlet Nozzle and Impeller On EfficienyDocument12 pagesEffect of Axial Gap Between Inlet Nozzle and Impeller On EfficienyHüseyin Atakan BaytaşNo ratings yet
- Spreadsheet - Gas Blanketed Tanks - Outbreathing Process CalculationsDocument12 pagesSpreadsheet - Gas Blanketed Tanks - Outbreathing Process Calculationsselva_maniaNo ratings yet
- Kfe e 1229r DG MergedDocument17 pagesKfe e 1229r DG MergedNagi ReddyNo ratings yet
- DamsDocument9 pagesDamsRichard TagleNo ratings yet
- B628B Optimizing Descaling PDFDocument24 pagesB628B Optimizing Descaling PDFGunawan WibisonoNo ratings yet
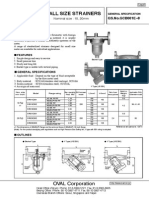
- Y StrainerDocument2 pagesY StrainerAishiteruNo ratings yet
- Ec 0411 PDFDocument7 pagesEc 0411 PDFmhasansharifiNo ratings yet
- Thesis ElmabrokDocument246 pagesThesis ElmabrokAnthony BovellNo ratings yet
- Flow Measurement GuidelinesDocument27 pagesFlow Measurement GuidelinesAkram DriraNo ratings yet
- JayDocument13 pagesJaySam SepiolNo ratings yet
- DBL 810388 04 RK16A enDocument2 pagesDBL 810388 04 RK16A enVignesh NadimuthuNo ratings yet
- Lubrication of Rolling BearingsDocument228 pagesLubrication of Rolling Bearingscamilo.ponce.ayalaNo ratings yet
- Flow Through A Venturi MeterDocument13 pagesFlow Through A Venturi MeterAnis SyafiqahNo ratings yet
- Flow Meter SelectionDocument5 pagesFlow Meter SelectionRSNo ratings yet
- Glycol Correction FrictionDocument4 pagesGlycol Correction FrictionDave WestbrookNo ratings yet
- Linear Stability Theory SoDocument19 pagesLinear Stability Theory Soabdul majeedNo ratings yet
- 19B Liquids IIDocument2 pages19B Liquids IIMario MeridaNo ratings yet
- Ronald E. Vieira, Siamack A. Shirazi: SciencedirectDocument8 pagesRonald E. Vieira, Siamack A. Shirazi: SciencedirectEdsonNo ratings yet
- Duri Crude Oil PropertiesDocument8 pagesDuri Crude Oil PropertiesBayu Ajip100% (1)
- Dam Outlet WorksDocument3 pagesDam Outlet WorksJohn Sanow100% (1)
- Pipe Flow ReportDocument6 pagesPipe Flow ReportChandan KumarNo ratings yet
- Daily Report For Emc Team 24-10-2020Document10 pagesDaily Report For Emc Team 24-10-2020hamadaNo ratings yet
- SA 836 - Separation System - Installation - 2005Document51 pagesSA 836 - Separation System - Installation - 2005Centrifugal SeparatorNo ratings yet
- Transport Mechanics: A. Reynolds Number C. Mach NumberDocument22 pagesTransport Mechanics: A. Reynolds Number C. Mach Numberjerome deiparineNo ratings yet
- Shell and Tube Heat Exchanger DesignDocument66 pagesShell and Tube Heat Exchanger DesignOmkar SutarNo ratings yet
- 1930 - Application of Goldstein's Airscrew Theory To DesignDocument30 pages1930 - Application of Goldstein's Airscrew Theory To DesignterenceNo ratings yet
- Hydraulic Oil VG 15 - 460Document1 pageHydraulic Oil VG 15 - 460dnoaisapsNo ratings yet