You might also like
- 3 1 Worksheet Parallel Lines and Transversal PDFDocument3 pages3 1 Worksheet Parallel Lines and Transversal PDFRichard Briones33% (3)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Vsepr HandoutDocument2 pagesVsepr Handout20718 LAY BUFFON FERNANDO GROSSONo ratings yet
- Surveying Azimuths and CoordinatesDocument13 pagesSurveying Azimuths and CoordinatesTamer AbuaitaNo ratings yet
- Functions and GraphsDocument60 pagesFunctions and GraphsAl HassanNo ratings yet
- QuadeqDocument7 pagesQuadeqОлександр РєзнікNo ratings yet
- EulerDocument9 pagesEulerОлександр РєзнікNo ratings yet
- Lect 13Document33 pagesLect 13Ganabpaty ThiagarajanNo ratings yet
- Trial Perlis P1Document19 pagesTrial Perlis P1abNo ratings yet
- Statics7 7-04-2017Document21 pagesStatics7 7-04-2017adel swarNo ratings yet
- MOMENT OF INERTIADocument21 pagesMOMENT OF INERTIAadel swarNo ratings yet
- Statics7 7-04-2017Document21 pagesStatics7 7-04-2017adel swarNo ratings yet
- EM1 Vector and FieldDocument92 pagesEM1 Vector and FieldJohnNo ratings yet
- VSEPR Theory (Molecular Shapes) - An Overview of Valence Shell Electron Pair Repulsion Theory and Molecular GeometryDocument2 pagesVSEPR Theory (Molecular Shapes) - An Overview of Valence Shell Electron Pair Repulsion Theory and Molecular GeometryAdrianne Jericho ValdezNo ratings yet
- VSEPR Handout PDFDocument2 pagesVSEPR Handout PDFLittle One0% (1)
- FG200308-malfatti Circles PDFDocument11 pagesFG200308-malfatti Circles PDFMario DalcínNo ratings yet
- GR 7:8 MATHS Angles - 1Document4 pagesGR 7:8 MATHS Angles - 1Ita JoubertNo ratings yet
- TAMU MEEN 431 HW 1 SolutionsDocument10 pagesTAMU MEEN 431 HW 1 Solutionslojomojo2No ratings yet
- Add (+) and/or subtract (-) from left to rightDocument6 pagesAdd (+) and/or subtract (-) from left to rightRakotondrafaraNo ratings yet
- Calculating gradients of curvesDocument6 pagesCalculating gradients of curvesNisheli Amani PereraNo ratings yet
- Solid Modeling Techniques: Half Spaces Boundary Representation (B-Rep)Document21 pagesSolid Modeling Techniques: Half Spaces Boundary Representation (B-Rep)rahul.yerrawarNo ratings yet
- SpatialIntro PDFDocument29 pagesSpatialIntro PDFchiranjeeviNo ratings yet
- SpatialIntro PDFDocument29 pagesSpatialIntro PDFchiranjeeviNo ratings yet
- Differentiation, Integration and CentroidsDocument4 pagesDifferentiation, Integration and CentroidsGilberto BernardesNo ratings yet
- RAPLICA 7TH JANUARY EVENING MATHEMATICSDocument13 pagesRAPLICA 7TH JANUARY EVENING MATHEMATICSgaurav gargNo ratings yet
- SM Notredame PL130 3O INTDocument12 pagesSM Notredame PL130 3O INTZefferino MoreschiNo ratings yet
- Midterm 3 SolutionDocument6 pagesMidterm 3 Solutionjohn smithNo ratings yet
- Mech of Solids 1 Formula SheetDocument2 pagesMech of Solids 1 Formula SheetJames Joe . WoonNo ratings yet
- Market Assessment Design Core SpecificationDocument34 pagesMarket Assessment Design Core SpecificationWesley SaenzNo ratings yet
- Moments of Sections: Appendix A Useful Solutions To Standard ProblemsDocument4 pagesMoments of Sections: Appendix A Useful Solutions To Standard ProblemsKholil JavaNo ratings yet
- Ch3 DeterminantsDocument76 pagesCh3 Determinants陳品涵No ratings yet
- Formula b4001Document2 pagesFormula b4001safurasaariNo ratings yet
- EMBED EquationDocument6 pagesEMBED EquationKUEK KONG BONGNo ratings yet
- 235 Piano Proficiency Test Requirements: ScalesDocument14 pages235 Piano Proficiency Test Requirements: ScalesAdrianeSilvaNo ratings yet
- Geometria ENDocument3 pagesGeometria ENziednouira50No ratings yet
- Adobe Scan 13 Aug 2023Document12 pagesAdobe Scan 13 Aug 2023Pritesh DesaiNo ratings yet
- Properties of geometric shapesDocument13 pagesProperties of geometric shapesdranwarNo ratings yet
- Exam 1 solution key conceptsDocument3 pagesExam 1 solution key conceptsJaydenNo ratings yet
- Moment of Inertia CalculationsDocument32 pagesMoment of Inertia CalculationsG Gfr YMaNo ratings yet
- Topic 3. Geometry and TrigonometryDocument60 pagesTopic 3. Geometry and Trigonometrymarsh kingsleyNo ratings yet
- Lectut IMA 303 PDF Robotic Tut2Document2 pagesLectut IMA 303 PDF Robotic Tut2Amarthya PalreddyNo ratings yet
- Communication Task #3 Exponentials and LogsDocument3 pagesCommunication Task #3 Exponentials and LogsKimberly DNo ratings yet
- Common Mensuration Formulae: Drawing SR - No Object Surface AreaDocument4 pagesCommon Mensuration Formulae: Drawing SR - No Object Surface AreamariaLazarus75% (4)
- Kvrgic - DimicDocument7 pagesKvrgic - DimicZoran DimicNo ratings yet
- Mensuration FormulaeDocument2 pagesMensuration FormulaeNikhil SinhaNo ratings yet
- Unit 3Document33 pagesUnit 3Драгослав БјелицаNo ratings yet
- Chapter 2Document64 pagesChapter 2Amira FawzyNo ratings yet
- P1笔记1Document8 pagesP1笔记1Cai MingleiNo ratings yet
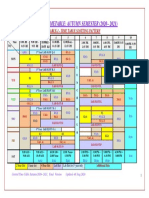
- Central Timetable: Autumn Semester: Table-1 - Time Table Slotting PatternDocument1 pageCentral Timetable: Autumn Semester: Table-1 - Time Table Slotting Patternbrahma2deen2chaudharNo ratings yet
- Selected Topics of MathematicsDocument10 pagesSelected Topics of Mathematicsmbakhshi2No ratings yet
- Introduction Complex VariablesDocument13 pagesIntroduction Complex VariablesPandu DoradlaNo ratings yet
- Moment of Inertia of Typical Section: y h/2 h/2 B yDocument1 pageMoment of Inertia of Typical Section: y h/2 h/2 B yBehairy AhmedNo ratings yet
- Double and Triple Integration in Polar CoordinatesDocument25 pagesDouble and Triple Integration in Polar CoordinatesLol KekNo ratings yet
- 2606 Physics Paper With Solution EveningDocument8 pages2606 Physics Paper With Solution Eveningprasant raokholaNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAshish Kumar JhaNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAnurag JangraNo ratings yet
- Topic 3A. TrigonometryDocument47 pagesTopic 3A. TrigonometryMaria SalbarreyNo ratings yet
- Chapter 2 The Laplace Transform: 2.2 (A) Complex NumbersDocument9 pagesChapter 2 The Laplace Transform: 2.2 (A) Complex NumberskhaledNo ratings yet
- Fem 8Document20 pagesFem 8tilahun yeshiyeNo ratings yet
- AxisangleDocument11 pagesAxisangleОлександр РєзнікNo ratings yet
- TransformationsDocument18 pagesTransformationsОлександр РєзнікNo ratings yet
- Matrix EigDocument14 pagesMatrix EigОлександр РєзнікNo ratings yet
- QuaternionsDocument7 pagesQuaternionsОлександр РєзнікNo ratings yet