You might also like
- Bell 30 EDocument918 pagesBell 30 Esfe100% (10)
- SSP 564 The 2 0 Litre TDI Engine in The T6Document40 pagesSSP 564 The 2 0 Litre TDI Engine in The T6firefly12380% (5)
- MEC-E5003 Fluid Power Basics Calculation Exercises 1 Spring 2017Document2 pagesMEC-E5003 Fluid Power Basics Calculation Exercises 1 Spring 2017أبو أسامة حمدي0% (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Mini Cooper S R53 Manual TallerDocument3,510 pagesMini Cooper S R53 Manual TallerJonayNo ratings yet
- Updated Wing TheoryDocument21 pagesUpdated Wing TheoryCap100% (2)
- International - VT365 (2002-06)Document9 pagesInternational - VT365 (2002-06)Eduardo AlvarezNo ratings yet
- 30 Wiring DiagramDocument2 pages30 Wiring DiagramKoet Ji Ces100% (3)
- Engine PerformanceDocument42 pagesEngine Performancemustafa1011No ratings yet
- Performance ParametersDocument18 pagesPerformance ParametersChikeNo ratings yet
- Engine PerformanceDocument3 pagesEngine Performancemr_rusho100% (1)
- Engine Design and Performance Parameters: Chapter TwoDocument22 pagesEngine Design and Performance Parameters: Chapter Twoمحمد عبدالكريم عابدNo ratings yet
- 3-2103471 Basic of Engine OperationDocument47 pages3-2103471 Basic of Engine OperationCABean1No ratings yet
- Engine Design and Operating Parameters: TopicDocument42 pagesEngine Design and Operating Parameters: TopicSyedNo ratings yet
- Engine Design and Operating ParametersDocument59 pagesEngine Design and Operating ParametersAneeq RaheemNo ratings yet
- 1-Characteristics and Performances DefinitionDocument6 pages1-Characteristics and Performances DefinitionDN CoverNo ratings yet
- 4463 L2 - Engine Operating ParametersDocument36 pages4463 L2 - Engine Operating Parametersمحمود نهاد العملةNo ratings yet
- U22295 Exam Equations SheetDocument3 pagesU22295 Exam Equations SheetNicholas O'CallaghanNo ratings yet
- Engine ParametresDocument35 pagesEngine ParametresLeonardo ArcamoneNo ratings yet
- Geotechnical Engineering-Ii: BSC Civil Engineering - 5 SemesterDocument6 pagesGeotechnical Engineering-Ii: BSC Civil Engineering - 5 SemesterSaid-Mansour MohamedNo ratings yet
- Performance and Operating Characterstics of IC Engine PDFDocument91 pagesPerformance and Operating Characterstics of IC Engine PDFSiraye AbirhamNo ratings yet
- Gas Power Cycles: H.K.Ma National Taiwan University Content 9-6Document35 pagesGas Power Cycles: H.K.Ma National Taiwan University Content 9-6Nalliah PrabakaranNo ratings yet
- CE202 2020 HM Part IIDocument26 pagesCE202 2020 HM Part IIVisal PiscelNo ratings yet
- Efficiency Nozzle: V U KC K V VDocument3 pagesEfficiency Nozzle: V U KC K V VChukwu Chukwuemeka JudeNo ratings yet
- CH 11 Compressible FlowDocument68 pagesCH 11 Compressible FlowWaleedNo ratings yet
- Means To Complete The Second Law of Power Retrieval .: Jets & Buckets For Pelton WheelsDocument20 pagesMeans To Complete The Second Law of Power Retrieval .: Jets & Buckets For Pelton WheelsSasankNo ratings yet
- Fluid System 11-Axial Flow Compressor and FanDocument29 pagesFluid System 11-Axial Flow Compressor and Fanmuhammad irfan Septian nugrahaNo ratings yet
- Means To Complete The Second Law of Power Retrieval .: Jets & Buckets For Pelton WheelsDocument20 pagesMeans To Complete The Second Law of Power Retrieval .: Jets & Buckets For Pelton WheelsDonajean DanguilanNo ratings yet
- Design of Gantry GirderDocument14 pagesDesign of Gantry Girdervijay10484No ratings yet
- Exercises Plasma PhysicsDocument67 pagesExercises Plasma PhysicsEsthefano Morales Campaña100% (1)
- Vol Flow MeasurementsDocument30 pagesVol Flow MeasurementsKuldeep KumarNo ratings yet
- 3.4 Operating ParametersDocument29 pages3.4 Operating ParametersrkNo ratings yet
- 4 Operating ParametersDocument31 pages4 Operating Parametersxemovi7309No ratings yet
- CH 11Document32 pagesCH 11kere evaNo ratings yet
- Formula ListDocument3 pagesFormula ListRaihanNo ratings yet
- Lec#9 - CH15 - Kinematics of RB - Part2Document24 pagesLec#9 - CH15 - Kinematics of RB - Part2Habeba MahmoudNo ratings yet
- Chapter 32B - RC CircuitsDocument19 pagesChapter 32B - RC Circuitsrai shb the greatNo ratings yet
- Spiral Curve Earthworks and Hydrographic SurveyDocument7 pagesSpiral Curve Earthworks and Hydrographic Surveykevin_ramos007100% (1)
- Civil Engineering Mechanics CVG2149: Kinematics of Rigid Bodies (CH. 15)Document8 pagesCivil Engineering Mechanics CVG2149: Kinematics of Rigid Bodies (CH. 15)Kaiss Nael OsmanNo ratings yet
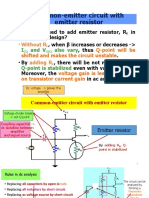
- Common-Emitter Circuit With Emitter Resistor: Without RDocument16 pagesCommon-Emitter Circuit With Emitter Resistor: Without RMuthukrishnan Vijayan VijayanNo ratings yet
- Design Analysis of Parts of Pelton Wheel Turbine: Selection of Right Parts and Right Geometry To Execute Pure Impulse .Document53 pagesDesign Analysis of Parts of Pelton Wheel Turbine: Selection of Right Parts and Right Geometry To Execute Pure Impulse .Dinesh KumarNo ratings yet
- Penurunan 2Document5 pagesPenurunan 2Fadli PunyeNo ratings yet
- ObjectivesDocument19 pagesObjectivesMuthukrishnan Vijayan VijayanNo ratings yet
- Axial Flow Compressors: An Efficient Way To Ingest Life in Large Amount of Fluids !!!Document30 pagesAxial Flow Compressors: An Efficient Way To Ingest Life in Large Amount of Fluids !!!Keerthi MNo ratings yet
- Valeur KV Calcul de Vanne PDFDocument2 pagesValeur KV Calcul de Vanne PDFkhali54No ratings yet
- 2.performance and Operating Characterstics of IC EngineDocument60 pages2.performance and Operating Characterstics of IC EngineSiraj MohammedNo ratings yet
- Recap: Lecture 4: - Thermodynamics of Compression - Basic Operation of Axial CompressorsDocument11 pagesRecap: Lecture 4: - Thermodynamics of Compression - Basic Operation of Axial CompressorslavaNo ratings yet
- Recap: Lecture 5: - Velocity Components and Nomenclature - Velocity TrianglesDocument16 pagesRecap: Lecture 5: - Velocity Components and Nomenclature - Velocity TriangleslavaNo ratings yet
- Lect 5 PLL 2Document18 pagesLect 5 PLL 2Trần Tấn ĐạiNo ratings yet
- Fluid Machine For Chemical Engineers (Cheg2101) : Theory of Positive Displacement CompressorsDocument18 pagesFluid Machine For Chemical Engineers (Cheg2101) : Theory of Positive Displacement Compressorsselemon emiruNo ratings yet
- Compressors: Dr.K.V.N. Srinivasa RaoDocument62 pagesCompressors: Dr.K.V.N. Srinivasa RaoLalith SunkojuNo ratings yet
- MA6641 - Ch05 - Cruise Performance - STDDocument42 pagesMA6641 - Ch05 - Cruise Performance - STDrajesh2709No ratings yet
- Week 6 NotesDocument2 pagesWeek 6 NotesBowei ZhangNo ratings yet
- Slide Sistem Penggerak ElektrikDocument25 pagesSlide Sistem Penggerak ElektrikwidhiNo ratings yet
- Unit No 2Document16 pagesUnit No 2jagdishmore911No ratings yet
- Broadway Hilti Handrail Base PDFDocument4 pagesBroadway Hilti Handrail Base PDFjijinjohnNo ratings yet
- Capacitive Effects in The PN Junction: - Depletion CapacitanceDocument18 pagesCapacitive Effects in The PN Junction: - Depletion CapacitanceJskNo ratings yet
- Data Sheet: Formulae For System Design & Graph Calculation NomogramsDocument7 pagesData Sheet: Formulae For System Design & Graph Calculation NomogramsAlaa M SlamaNo ratings yet
- Fluids Lect 3Document19 pagesFluids Lect 3julianhamamaNo ratings yet
- Formula Sheet For Astronomy 1 - Paper 1 and Stars & PlanetsDocument2 pagesFormula Sheet For Astronomy 1 - Paper 1 and Stars & PlanetsprashinNo ratings yet
- CH 11 Compressible FlowDocument76 pagesCH 11 Compressible FlowEssa RasanNo ratings yet
- Corolla Engine Mechanical - Torque Specifications (07 - 2012 - ) (Engine) - ALLDATA RepairDocument4 pagesCorolla Engine Mechanical - Torque Specifications (07 - 2012 - ) (Engine) - ALLDATA RepairFran SanchezNo ratings yet
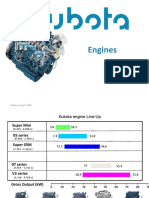
- Kubota Engine Models PresentationDocument16 pagesKubota Engine Models PresentationKaloyanNo ratings yet
- M54 Technical InformationDocument48 pagesM54 Technical InformationLuke Lu100% (2)
- Wankel Engine: Jump To Navigation Jump To SearchDocument37 pagesWankel Engine: Jump To Navigation Jump To SearchRajeshwar SinghNo ratings yet
- Tecumseh Model Oh140 160027a Parts ListDocument9 pagesTecumseh Model Oh140 160027a Parts ListpaulpaulNo ratings yet
- The Influence of Port Fuel Injection On Combustion StabilityDocument11 pagesThe Influence of Port Fuel Injection On Combustion Stabilitystefan.vince536No ratings yet
- Chapter 2Document24 pagesChapter 2Htut Ko Ko YeeNo ratings yet
- Belts: Clark HysterDocument2 pagesBelts: Clark HysterRica RdoNo ratings yet
- Yanmar 9 HPDocument2 pagesYanmar 9 HPAhmet ErdemilNo ratings yet
- 194-210 CSG649 Service Manual PDFDocument107 pages194-210 CSG649 Service Manual PDFvipgcNo ratings yet
- GCV160 PDFDocument1 pageGCV160 PDFClejeanu MihaelaNo ratings yet
- Johnson Outboard Inline Piston & RingsDocument4 pagesJohnson Outboard Inline Piston & RingsMarine Parts ChinaNo ratings yet
- CB434C Kebp0157-09Document610 pagesCB434C Kebp0157-09Jorge Andres Arias Pairazaman100% (4)
- B.E (Iv/Iv) - Mechanical - B: Rotary EngineDocument25 pagesB.E (Iv/Iv) - Mechanical - B: Rotary EngineFaiz Naeem Sait100% (1)
- 1HD T Engine SpecsDocument2 pages1HD T Engine Specs6Pacman100% (3)
- Kobelco Mark IV: KobeicoDocument41 pagesKobelco Mark IV: KobeicoVictor Hugo MezquitaNo ratings yet
- SL2016 627Document15 pagesSL2016 627lavkeshNo ratings yet
- 03-01C Engine, 4.0L V-66ford 4.0 Repair ManualDocument206 pages03-01C Engine, 4.0L V-66ford 4.0 Repair ManualMike GunionNo ratings yet
- 4JH3 HteDocument2 pages4JH3 HteIvana Muratti JerkovicNo ratings yet
- Camshaft (Hilux/1Kd-Ftv, 2Kd-Ftv (Tasa Made For Argentina) ) : ReplacementDocument5 pagesCamshaft (Hilux/1Kd-Ftv, 2Kd-Ftv (Tasa Made For Argentina) ) : ReplacementJefry LehgansNo ratings yet
- Electronic Diesel Exhaust Gas Recirculation Valves PDFDocument2 pagesElectronic Diesel Exhaust Gas Recirculation Valves PDFdeeparunNo ratings yet
- Sl2022-725 Updated Piston Ring CoatingsDocument1 pageSl2022-725 Updated Piston Ring CoatingsAnkit ChauhanNo ratings yet
- Fault Code 1657 Engine Misfire Cylinder 4 - Condition ExistsDocument6 pagesFault Code 1657 Engine Misfire Cylinder 4 - Condition ExistsAhmedmahNo ratings yet
- Project Guide Wartsila38Document186 pagesProject Guide Wartsila38Erwin Paulian Sihombing50% (2)
- LecturesDocument142 pagesLecturesMuhammad RazaNo ratings yet