You might also like
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- LECTURE 3-BJT Common-Emitter Amplifier Ver3Document41 pagesLECTURE 3-BJT Common-Emitter Amplifier Ver3Sankalp SharmaNo ratings yet
- Transistor BJT - 3Document56 pagesTransistor BJT - 3Sinta reinaNo ratings yet
- DC Analysis and Small Signal Modeling of Common Emitter AmplifierDocument19 pagesDC Analysis and Small Signal Modeling of Common Emitter AmplifierMuthukrishnan Vijayan VijayanNo ratings yet
- C 411 L 15 Dynamic LogicDocument39 pagesC 411 L 15 Dynamic Logickeshav rocksNo ratings yet
- Multi Stage Transistero AmplifierDocument4 pagesMulti Stage Transistero Amplifierkaran007_mNo ratings yet
- Multistage AmplifiersDocument22 pagesMultistage AmplifiersParvinder SinghNo ratings yet
- ECE 4121 Lec08WireDocument34 pagesECE 4121 Lec08WireSunil ChoudharyNo ratings yet
- RC Circuits: Charging, Discharging, Integration & DifferentiationDocument7 pagesRC Circuits: Charging, Discharging, Integration & DifferentiationMohmed Al NajarNo ratings yet
- Electronic Circuit AnalysisDocument23 pagesElectronic Circuit AnalysisAnonymous uspYoqENo ratings yet
- Chapter 1 of EDC - IIDocument86 pagesChapter 1 of EDC - IITestAutomationSel2020No ratings yet
- Fan6961 An-6961Document8 pagesFan6961 An-6961sergioviriliNo ratings yet
- LM5030 Application: DC - DC Converter Utilizing The Push-Pull TopologyDocument10 pagesLM5030 Application: DC - DC Converter Utilizing The Push-Pull TopologyEdoardoNo ratings yet
- Tu0402switcherki2009isic 140305063756 Phpapp01Document48 pagesTu0402switcherki2009isic 140305063756 Phpapp01Udai ValluruNo ratings yet
- SCR / Thyristor: - Circuit Symbol and Terminal IdentificationDocument13 pagesSCR / Thyristor: - Circuit Symbol and Terminal IdentificationlubnaNo ratings yet
- HA17524Document18 pagesHA175248403c36589584aNo ratings yet
- Design Considerations and Small Signal Modeling of The Flyback Converter Using Second Stage LC Filtering CircuitDocument6 pagesDesign Considerations and Small Signal Modeling of The Flyback Converter Using Second Stage LC Filtering CircuitDavid Isaias Jaimes ReyesNo ratings yet
- STABILIZE THE BUCK CONVERTERDocument12 pagesSTABILIZE THE BUCK CONVERTERMaurício YoshimotoNo ratings yet
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- lecture_11Document34 pageslecture_11ajayNo ratings yet
- Gain of Cascaded AmplifiersDocument8 pagesGain of Cascaded AmplifiersAarushi Jain100% (1)
- Power Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified OrganizationDocument19 pagesPower Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified Organizationameiyappan5697No ratings yet
- KKKL2173 - Power AmplifierDocument49 pagesKKKL2173 - Power AmplifierAmir MustakimNo ratings yet
- Ch5 - AmplifiersDocument149 pagesCh5 - AmplifiersRaghav AroraNo ratings yet
- OnSemi The TL431 in The Control of Switching Power Supplies PDFDocument63 pagesOnSemi The TL431 in The Control of Switching Power Supplies PDFFernando BotteronNo ratings yet
- EE3115 Exam Review ProblemsDocument9 pagesEE3115 Exam Review ProblemsNajmoAdenNo ratings yet
- Oscillator FundamentalsDocument31 pagesOscillator FundamentalsKingLokeshNo ratings yet
- Photovoltaic Power GenerationDocument61 pagesPhotovoltaic Power GenerationChirag ParasharNo ratings yet
- Differential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithDocument17 pagesDifferential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithpradozuritaNo ratings yet
- Boost Interleaved Buck Boost ConverterDocument7 pagesBoost Interleaved Buck Boost ConverterSrikanth PolisettyNo ratings yet
- Flip Flop JK 7473Document11 pagesFlip Flop JK 7473Tatyantoro AndrastoNo ratings yet
- 7 LogicStyle3Document59 pages7 LogicStyle3YeasminNo ratings yet
- Control of Smps A Refresher Part 3Document13 pagesControl of Smps A Refresher Part 3Alvaro Javier Baños RiveraNo ratings yet
- Laboratory Report Cover SheetDocument14 pagesLaboratory Report Cover SheetPreet PatelNo ratings yet
- Vco-151215121140 Import PPTDocument60 pagesVco-151215121140 Import PPTRizwan SPNo ratings yet
- Lect 4 PLL 1Document29 pagesLect 4 PLL 1Trần Tấn ĐạiNo ratings yet
- Ch8 Output Stages and Power AmplifiersDocument20 pagesCh8 Output Stages and Power Amplifiers陳冠邑No ratings yet
- R1290K Series: 3ch DC/DC For TFT LCDDocument42 pagesR1290K Series: 3ch DC/DC For TFT LCDSergei OssifNo ratings yet
- OP練習題Document6 pagesOP練習題林宏儒No ratings yet
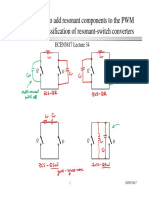
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDocument11 pagesPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ADocument17 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ASledge HammerNo ratings yet
- HCNR200 Application NoteDocument10 pagesHCNR200 Application NoteGustavoNo ratings yet
- H2PToday1806_design_TexasInstruments_Part 5Document10 pagesH2PToday1806_design_TexasInstruments_Part 5lcisnydeksdtaujutlNo ratings yet
- Ea 1Document20 pagesEa 1SutantoNo ratings yet
- TA7343APDocument5 pagesTA7343APcii28529No ratings yet
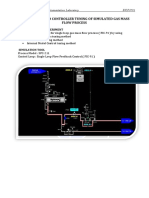
- Experiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessDocument6 pagesExperiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessPMNo ratings yet
- Chap 15Document18 pagesChap 15GagneNo ratings yet
- Common-Emitter Circuit With Emitter Resistor: Without RDocument16 pagesCommon-Emitter Circuit With Emitter Resistor: Without RMuthukrishnan Vijayan VijayanNo ratings yet
- Vdocuments - MX Edn Design Ideas 2002Document198 pagesVdocuments - MX Edn Design Ideas 2002ciccioNo ratings yet
- Multi AmpDocument21 pagesMulti AmpMUHAMMAD KHAIRUL ANUAR BIN JUHARI A22EE0178No ratings yet
- Relaxation Oscillators Triangular Waveform Generators: Two Mark Questions One Mark QuestionsDocument3 pagesRelaxation Oscillators Triangular Waveform Generators: Two Mark Questions One Mark QuestionsAbhinavNo ratings yet
- Critical Flow Sub-Critical FlowDocument4 pagesCritical Flow Sub-Critical Flowjhon smithNo ratings yet
- 2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFDocument23 pages2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFhord72No ratings yet
- 15ecl48 VTU LIC LAB Raghudathesh Adder Integrator and DifferentiatorDocument14 pages15ecl48 VTU LIC LAB Raghudathesh Adder Integrator and Differentiatorraghudatheshgp50% (4)
- 15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFDocument14 pages15ecl48-VTU-raghudathesh-Adder Integrator and Differentiator PDFraghudatheshgpNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Stock List - TR 1Document1 pageStock List - TR 1kshanmugaNo ratings yet
- LT1073 Usos y Aplicaciones 1.5V To 12VDocument16 pagesLT1073 Usos y Aplicaciones 1.5V To 12VJose Alberto Zamacona VargasNo ratings yet
- Tesla's Electric CarDocument5 pagesTesla's Electric CarRossen Petrov0% (1)
- Universal GD10 ManualDocument110 pagesUniversal GD10 ManualSafy SrioNo ratings yet
- Manual CA8336Document122 pagesManual CA833617gesNo ratings yet
- VSSC6 MOV 24VAC DC enDocument4 pagesVSSC6 MOV 24VAC DC enparas99No ratings yet
- Seminarski Rad - Merenje TemperatureDocument93 pagesSeminarski Rad - Merenje TemperatureĐura ĐukanovićNo ratings yet
- Efie D17Document0 pagesEfie D17apostol_menNo ratings yet
- Unbalanced 3-Phase System PDFDocument16 pagesUnbalanced 3-Phase System PDFCandy ChocolateNo ratings yet
- Cal. P.U.C. Sheet No. Cancelling Revised Cal. P.U.C. Sheet NoDocument9 pagesCal. P.U.C. Sheet No. Cancelling Revised Cal. P.U.C. Sheet NoshadabNo ratings yet
- 1.CMOS VLSI DesignDocument2 pages1.CMOS VLSI DesignSYAMALA100% (1)
- SYMAP UsersManual E PDFDocument98 pagesSYMAP UsersManual E PDFvigneshwarannn100% (2)
- 260 ManualDocument83 pages260 ManualawebagarNo ratings yet
- The Morals of Measurement: Accuracy, Irony, and Trust in Late Victorian Electrical PracticeDocument20 pagesThe Morals of Measurement: Accuracy, Irony, and Trust in Late Victorian Electrical PracticeMAROUANE AbdelkaderNo ratings yet
- Join AKTU Telegram GroupDocument82 pagesJoin AKTU Telegram GroupsurajNo ratings yet
- GPS 4500 v2: Satellite Time Signal ReceiverDocument4 pagesGPS 4500 v2: Satellite Time Signal ReceiverCesar Estrada Estrada MataNo ratings yet
- 1989 OKI Vacuum Flourescent Driver Data BookDocument328 pages1989 OKI Vacuum Flourescent Driver Data Bookmusikleer100% (1)
- Mutual Inductance and Transformer Circuits With Ltspice IvDocument4 pagesMutual Inductance and Transformer Circuits With Ltspice IvSteinerNo ratings yet
- Power CablesDocument7 pagesPower CablesfaharaNo ratings yet
- Multiple Choice Questions of Electric Traction For 4-4 JntuDocument26 pagesMultiple Choice Questions of Electric Traction For 4-4 JntuChandra Sekhar67% (3)
- Electronics Circuits Lab ManualDocument109 pagesElectronics Circuits Lab ManualIndische Mädchen100% (2)
- Transformer protection guideDocument195 pagesTransformer protection guideRafael Curiel MedinaNo ratings yet
- SMPS Calculator - OdsDocument4 pagesSMPS Calculator - OdsSerghei PlamadealaNo ratings yet
- GV350M Series User Manual: EGPRS/LTE Cat-M1/LTE Cat-NB1/GNSS TrackerDocument18 pagesGV350M Series User Manual: EGPRS/LTE Cat-M1/LTE Cat-NB1/GNSS TrackerNahuelNo ratings yet
- Heliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDocument4 pagesHeliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDeepan MNo ratings yet
- Physics Investigatory ProjectDocument13 pagesPhysics Investigatory ProjectAnush DcostaNo ratings yet
- Soldering and Desoldering Electronics ComponentsDocument4 pagesSoldering and Desoldering Electronics ComponentsDulce DeNo ratings yet
- Bts 7960Document28 pagesBts 7960Nairo FilhoNo ratings yet
- Frequency Generator & Integrated Buffers For Celeron & PII/III™Document16 pagesFrequency Generator & Integrated Buffers For Celeron & PII/III™Willian CristianoNo ratings yet
- 95 - A53 Z1 9 0020 B en - Technical DocumentationDocument184 pages95 - A53 Z1 9 0020 B en - Technical DocumentationSyed Mohammad NaveedNo ratings yet