You might also like
- Bergson and The Metaphysics of Media PDFDocument197 pagesBergson and The Metaphysics of Media PDFDrMlad100% (2)
- Chap 14 Frequency Response AnalysisDocument20 pagesChap 14 Frequency Response AnalysisEngr. Afshan ishaq Electronics ABTNo ratings yet
- Power Electronics PPT by DeveshDocument34 pagesPower Electronics PPT by Deveshshadan alamNo ratings yet
- Estatement - 2021 10 22Document3 pagesEstatement - 2021 10 22Joseph HudsonNo ratings yet
- Tenses For SpeakingDocument34 pagesTenses For Speakingdsekulic_1100% (1)
- CE 331 NotesDocument95 pagesCE 331 NotesMarko CupacNo ratings yet
- Cubes - Lightweight Python OLAP FrameworkDocument103 pagesCubes - Lightweight Python OLAP FrameworkStefan Urbanek100% (1)
- Yanbu Industrial College: High Voltage Cables (Day1)Document23 pagesYanbu Industrial College: High Voltage Cables (Day1)Latif Ismail Shaikh100% (1)
- Chapter 2 ModelingDocument57 pagesChapter 2 ModelingcesarinigillasNo ratings yet
- Chap 4 - Strain Error-SourcesDocument23 pagesChap 4 - Strain Error-SourcesN. TuNo ratings yet
- Emi - Transducers & Strain GuageDocument52 pagesEmi - Transducers & Strain Guage20. Suhas PathareNo ratings yet
- Unit 5Document63 pagesUnit 5Anonymous XhmybKNo ratings yet
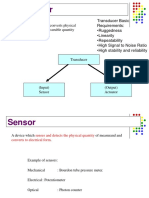
- Sensor and Transducer PDFDocument98 pagesSensor and Transducer PDFT SNo ratings yet
- The Analysis of The Behavior of The Passive Electronic Circuits in The Sinusoidal Steady State RegimeDocument21 pagesThe Analysis of The Behavior of The Passive Electronic Circuits in The Sinusoidal Steady State RegimeAdam GheorgheNo ratings yet
- The Analysis of The Behavior of The Passive Electronic Circuits in The Sinusoidal Steady State RegimeDocument21 pagesThe Analysis of The Behavior of The Passive Electronic Circuits in The Sinusoidal Steady State RegimeAdam GheorgheNo ratings yet
- Displacement and Position Sensors 2017Document10 pagesDisplacement and Position Sensors 2017Pandu Satrio JatiNo ratings yet
- Topic 3: Frequency Selective CircuitsDocument109 pagesTopic 3: Frequency Selective CircuitsAdnann NurdinNo ratings yet
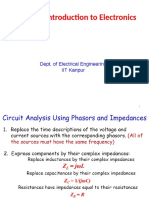
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument36 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurAbhishek AryaNo ratings yet
- Updated Formula Sheet-Quiz 1Document4 pagesUpdated Formula Sheet-Quiz 1Farid BeyrouthyNo ratings yet
- Biomedical IntroduccionDocument30 pagesBiomedical IntroduccionIsmael MontillaNo ratings yet
- Chapter 6 Measurement of Non-Electrical Quantities Term 2220Document72 pagesChapter 6 Measurement of Non-Electrical Quantities Term 2220j2yshjzzsxNo ratings yet
- TransducersDocument113 pagesTransducersneha yarrapothuNo ratings yet
- Basic Formulas AcousticsDocument16 pagesBasic Formulas Acousticssmani170100% (1)
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur Prajapatifares noureddineNo ratings yet
- Sensors and TransducersDocument20 pagesSensors and TransducersEngr Nouman MemonNo ratings yet
- Digital Filter DesignDocument31 pagesDigital Filter DesignSurafel TadesseNo ratings yet
- (2.1250) (2.2500) Inch: TS Type (53.975) (57.150) MMDocument1 page(2.1250) (2.2500) Inch: TS Type (53.975) (57.150) MMJeferson Avila QuirogaNo ratings yet
- Content: - Measurements of Various PropertiesDocument17 pagesContent: - Measurements of Various PropertiesShubhamGuptaNo ratings yet
- Electrical Sciences EEE F111Document39 pagesElectrical Sciences EEE F111Kriti TambareNo ratings yet
- Mechanical SensorsDocument77 pagesMechanical SensorsZahra AlazawiNo ratings yet
- AC Circuit & Diode BasicDocument45 pagesAC Circuit & Diode BasicKamaruz DanialNo ratings yet
- Control SystemDocument28 pagesControl SystemKelvin KongNo ratings yet
- Lecture 12Document38 pagesLecture 12Martian 07No ratings yet
- Agilent E4980A Precision LCR Meter - 5989-4435EN PDFDocument37 pagesAgilent E4980A Precision LCR Meter - 5989-4435EN PDFprovolissima0% (1)
- 2 Diode RectifierDocument63 pages2 Diode RectifierKaltoum Robleh jiirNo ratings yet
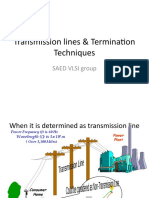
- Transmission Lines & Termination Techniques: SAED VLSI GroupDocument17 pagesTransmission Lines & Termination Techniques: SAED VLSI GrouplusinNo ratings yet
- הרצאה 7Document44 pagesהרצאה 7api-26922789No ratings yet
- Sinusoids, Phasors, and Steady-State AnalysisDocument53 pagesSinusoids, Phasors, and Steady-State AnalysisryanNo ratings yet
- 4 SA6 Transduction Principles 2015Document32 pages4 SA6 Transduction Principles 2015Mengistu AberaNo ratings yet
- M & GPM 4Document52 pagesM & GPM 4NALANDA CSC CENTRENo ratings yet
- TransducerDocument34 pagesTransducerVicky VishwakarmaNo ratings yet
- Basic Sensor and PrincipleDocument60 pagesBasic Sensor and Principleyeshwanth reddy RachumallaNo ratings yet
- Chapter 4Document45 pagesChapter 4Mohammad AliffuddinNo ratings yet
- d5 6 Resistivity ECT Jul07Document43 pagesd5 6 Resistivity ECT Jul07supreetha sharmaNo ratings yet
- Process Dynamic and Control: HadiyantoDocument112 pagesProcess Dynamic and Control: HadiyantoAtieGg KorNiea BrusHa LupHaNo ratings yet
- d5 6 Resistivity ECT Jul07Document43 pagesd5 6 Resistivity ECT Jul07majd abumoghdebNo ratings yet
- Single-Phase Half-Wave RectifierDocument33 pagesSingle-Phase Half-Wave RectifierMohsin ALi SoOmroNo ratings yet
- Lecture10 DigitalDocument53 pagesLecture10 DigitalMaggiNo ratings yet
- Frequency Selective Circuits: Osman Parlaktuna Osmangazi University Eskisehir, TURKEY WWW - Ogu.edu - TR/ OparlakDocument30 pagesFrequency Selective Circuits: Osman Parlaktuna Osmangazi University Eskisehir, TURKEY WWW - Ogu.edu - TR/ OparlakmivriNo ratings yet
- From AM Radio To Digital I/Q ModulationDocument57 pagesFrom AM Radio To Digital I/Q Modulationjtz00000No ratings yet
- Ciciut Desing and AnalysDocument37 pagesCiciut Desing and AnalysMeriçin HikayesiNo ratings yet
- LMH Chapter7-Part2Document70 pagesLMH Chapter7-Part2Nguyen Son N NguyenNo ratings yet
- Final 06PEDocument17 pagesFinal 06PEVaibhav TripathiNo ratings yet
- AE 242 Aerospace Measurements LaboratoryDocument28 pagesAE 242 Aerospace Measurements LaboratoryAnubhavNo ratings yet
- Basics of Microwave MeasurementsDocument20 pagesBasics of Microwave MeasurementsRamya SuriyaraniNo ratings yet
- Wa0004.Document56 pagesWa0004.hjai8015No ratings yet
- Communication Systems II Formula SheetDocument2 pagesCommunication Systems II Formula SheetGreenThumb100% (5)
- AC Circuit Analysis (Part 1) : EEE 3 Lecture 06Document40 pagesAC Circuit Analysis (Part 1) : EEE 3 Lecture 06No OneNo ratings yet
- 11-Bulk DeformationProcesses (Chapter 15)Document142 pages11-Bulk DeformationProcesses (Chapter 15)Taher al suhamiNo ratings yet
- Sensors - Resistive SensorsDocument43 pagesSensors - Resistive Sensors김수헌No ratings yet
- Em Chapter 2Document20 pagesEm Chapter 2crizzaorganistaNo ratings yet
- AC Circuits: Fundamentals of Electric CircuitsDocument16 pagesAC Circuits: Fundamentals of Electric CircuitsHiếu Dương100% (1)
- Alexander CH 14 Final R1Document20 pagesAlexander CH 14 Final R1utpNo ratings yet
- Part 2: Characteristics of A Measurement SystemDocument5 pagesPart 2: Characteristics of A Measurement System123andybNo ratings yet
- Chia SeDocument13 pagesChia Se12a3.letuananh.05No ratings yet
- Exercises CalculusI Winter2022Document35 pagesExercises CalculusI Winter202212a3.letuananh.05No ratings yet
- Emi ErrorDocument27 pagesEmi Error12a3.letuananh.05No ratings yet
- ECE OOP Lab2Document3 pagesECE OOP Lab212a3.letuananh.05No ratings yet
- 21 2024 Instruction Experiment TransformerDocument3 pages21 2024 Instruction Experiment Transformer12a3.letuananh.05No ratings yet
- Wartsila Water Lubricated Brochure v4 2Document7 pagesWartsila Water Lubricated Brochure v4 2Marlon Alejandro Arboleda TapiaNo ratings yet
- CMP2003 Lecturenotes Week9Document25 pagesCMP2003 Lecturenotes Week9Ammar JagadhitaNo ratings yet
- Jaquet FT3000 ManualDocument48 pagesJaquet FT3000 Manualaden mngNo ratings yet
- GT - (23-24) SCIENCE DESCRIPTIVE Exam For AP & TS. Class III-SA-II - 20240329 - 102038Document6 pagesGT - (23-24) SCIENCE DESCRIPTIVE Exam For AP & TS. Class III-SA-II - 20240329 - 102038Prema GNo ratings yet
- PSY316-Week-2-MODULE-1-Clinical PsychologyDocument12 pagesPSY316-Week-2-MODULE-1-Clinical PsychologyYza Cambosa-ReyesNo ratings yet
- A Practical Approach To Business Impact AnalysisDocument20 pagesA Practical Approach To Business Impact Analysisqadir147No ratings yet
- Snarling Dogs Blues Bawls WahDocument2 pagesSnarling Dogs Blues Bawls WahMy HaHNo ratings yet
- TcsDocument48 pagesTcsAsokan NiveditaNo ratings yet
- Mil STD 1877aDocument18 pagesMil STD 1877aMaría CamilaNo ratings yet
- Comprehension Orale Niveau 4 Competences b2c1 With CD Audio French Edition - snzzv8xDocument2 pagesComprehension Orale Niveau 4 Competences b2c1 With CD Audio French Edition - snzzv8xClient First0% (1)
- Lampiran 1 Tabulasi Data Variabel X No Kode Nama Perusahaan Current Ratio 2017 2018 2019Document11 pagesLampiran 1 Tabulasi Data Variabel X No Kode Nama Perusahaan Current Ratio 2017 2018 2019Pande GunawanNo ratings yet
- Nilp Education Gov in Nilp About UsDocument2 pagesNilp Education Gov in Nilp About UsH1190506M2009No ratings yet
- Assignment 1-1Document3 pagesAssignment 1-1muhaba AdegeNo ratings yet
- SMeyer-CA1231872A1-Hydrogen Injection System V3Document38 pagesSMeyer-CA1231872A1-Hydrogen Injection System V3Bryan RodríguezNo ratings yet
- Inverse Seesaw and Standard ModelDocument18 pagesInverse Seesaw and Standard ModelMallika P. ShivamNo ratings yet
- Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060Document56 pagesTotalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060dieguini1No ratings yet
- Joshua Anzalones ResumeDocument1 pageJoshua Anzalones Resumeapi-404755828No ratings yet
- Factors Affecting Job Performance of Criminology Working StudentDocument10 pagesFactors Affecting Job Performance of Criminology Working StudentJAIKO JOSE LAGANo ratings yet
- Basic Tutorials - Charge Controllers For Solar Energy SystemsDocument3 pagesBasic Tutorials - Charge Controllers For Solar Energy SystemsGeroldo 'Rollie' L. QuerijeroNo ratings yet
- Chapter 1 5 Group 4Document31 pagesChapter 1 5 Group 4John Patrick TurgoNo ratings yet
- Siprotec 4 Und Siprotec Compact: Service Information FirmwareupdateDocument45 pagesSiprotec 4 Und Siprotec Compact: Service Information FirmwareupdateAbhishek RajputNo ratings yet
- JES-Equipment Maintenance LOG SheetDocument1 pageJES-Equipment Maintenance LOG Sheetlike saddamNo ratings yet
- Using Slide Master in Powerpoint 2010Document5 pagesUsing Slide Master in Powerpoint 2010AHMAD AZHARNo ratings yet
- Modern Anaesthetic MachinesDocument4 pagesModern Anaesthetic MachinesSanj.etcNo ratings yet
- Determination of Moisture Content (ASTM D2216) : ProcedureDocument20 pagesDetermination of Moisture Content (ASTM D2216) : ProcedureJr SayreNo ratings yet