You might also like
- Lecture 8 Transmission PDFDocument6 pagesLecture 8 Transmission PDFabdul quadirNo ratings yet
- The Application of Bevel GearsDocument6 pagesThe Application of Bevel GearsPrasanth ThiagarajanNo ratings yet
- Tractor TransmissionDocument6 pagesTractor TransmissionParminder ParryNo ratings yet
- Transmission System NIT SILCGARDocument22 pagesTransmission System NIT SILCGARSuyashNo ratings yet
- Chapter KrishnaDocument43 pagesChapter Krishnabroken heartNo ratings yet
- Tfe Module 3Document14 pagesTfe Module 3Anandhu ANo ratings yet
- Mechanism For Guiding The Wheels or Rigid BridgesDocument12 pagesMechanism For Guiding The Wheels or Rigid BridgesRazvanArseneNo ratings yet
- Gear Box Design Project Two: Faculity of Mechanical and Industrial EngineeringDocument131 pagesGear Box Design Project Two: Faculity of Mechanical and Industrial Engineeringnigusu sisayNo ratings yet
- Chapter5-Clutch & Gear Box New (EngineeringDuniya - Com)Document40 pagesChapter5-Clutch & Gear Box New (EngineeringDuniya - Com)Shubham KaushikNo ratings yet
- Mathematical Modeling of The Electric Drive Train of The Sports CarDocument10 pagesMathematical Modeling of The Electric Drive Train of The Sports CarJuraj MadarásNo ratings yet
- OCW Analisis of Gear TrainsDocument11 pagesOCW Analisis of Gear TrainsVictor SibandaNo ratings yet
- Differentials and Final DrivesDocument2 pagesDifferentials and Final Drivesmburuiann180No ratings yet
- Automotive Power Trains: Machine Design & CAD - IDocument27 pagesAutomotive Power Trains: Machine Design & CAD - IKhalil RazaNo ratings yet
- Applications of Bevel GearDocument9 pagesApplications of Bevel GearPeter ParkerNo ratings yet
- Man GN PDF 6Document36 pagesMan GN PDF 6Adrian A UPD78% (9)
- Wheel Hub MotorDocument5 pagesWheel Hub MotorAnonymous Syjpyt4MoNo ratings yet
- 6th Semestermechanical Automobile Engineering Lab ManualDocument21 pages6th Semestermechanical Automobile Engineering Lab ManualSayan BiswasNo ratings yet
- Chapter 2Document22 pagesChapter 2avinashNo ratings yet
- Motor Cu Magneti PermanentiDocument5 pagesMotor Cu Magneti Permanentithecrazyman640% (1)
- Tractor TransparencyDocument10 pagesTractor TransparencyMark Kevin AlletoNo ratings yet
- Group 8Document17 pagesGroup 8abebe zewduNo ratings yet
- The DC Traction MotorDocument6 pagesThe DC Traction MotorKanaiya Nishad0% (1)
- 2.1 Tractor TransparencyDocument9 pages2.1 Tractor Transparencystephene larimNo ratings yet
- Wheel Steering SystemDocument28 pagesWheel Steering SystemKshitij SharmaNo ratings yet
- Drives Couplings.: Conveyor Belt Installations and Related ComponentsDocument3 pagesDrives Couplings.: Conveyor Belt Installations and Related ComponentsEric ToroNo ratings yet
- Automobile Transmission SystemDocument26 pagesAutomobile Transmission SystemSupravat KarmakarNo ratings yet
- Howo TransmisionDocument81 pagesHowo TransmisionMantenimiento Mecanico BiddleNo ratings yet
- 2.1 Tractor TransparencyDocument9 pages2.1 Tractor TransparencyLorenzo Niño BlasquezNo ratings yet
- Unit-Iv Steering SystemDocument20 pagesUnit-Iv Steering SystemMark MubiruNo ratings yet
- Chain Less BicycleDocument20 pagesChain Less BicycleSankalp HiremathNo ratings yet
- Dynamic BrakingDocument6 pagesDynamic BrakingKumar shantanu BasakNo ratings yet
- 482 12 Typical Designs of Vehicle Transmissions: 2/ Two-Stage 5-Speed Manual Passenger Car Gearbox ZF S 5-31Document9 pages482 12 Typical Designs of Vehicle Transmissions: 2/ Two-Stage 5-Speed Manual Passenger Car Gearbox ZF S 5-31Visan Laurentiu0% (1)
- Distribution Gearbox - Tha - 02 - 693918uDocument2 pagesDistribution Gearbox - Tha - 02 - 693918uSai Sudheer KattaNo ratings yet
- Electric Loco ShedDocument24 pagesElectric Loco Shedkavita upadhyay100% (1)
- Construction and Manufacture of AutomobilesFrom EverandConstruction and Manufacture of AutomobilesRating: 5 out of 5 stars5/5 (1)
- Automobile Transmission System Solved Papers PDFDocument52 pagesAutomobile Transmission System Solved Papers PDFSyedJavedAli100% (9)
- Tri WheelDocument6 pagesTri WheelAminul HoqueNo ratings yet
- Cwit, Pune General EngineeringDocument3 pagesCwit, Pune General EngineeringraokeshavyadavNo ratings yet
- There Are Essentially Four Types of Final Drive and Differential Combinations Used in TransaxlesDocument6 pagesThere Are Essentially Four Types of Final Drive and Differential Combinations Used in TransaxlesGthulasi78No ratings yet
- R.M. Van Druten, P.G. Van Tilborg, P.C.J.N. Rosielle, M.J.W. SchoutenDocument6 pagesR.M. Van Druten, P.G. Van Tilborg, P.C.J.N. Rosielle, M.J.W. SchoutenAjay ChandranNo ratings yet
- L02 Drive TrainDocument16 pagesL02 Drive TrainGokul Thalapthy Harish KumarNo ratings yet
- Experiment No. 5: Aim: Study of Various Types of Gear BoxesDocument9 pagesExperiment No. 5: Aim: Study of Various Types of Gear BoxesSiddhesh RaulNo ratings yet
- Cletrac Controlled Differential Steering SystemDocument10 pagesCletrac Controlled Differential Steering SystemGreggs ShopukNo ratings yet
- Design and Calculation of Five Speed Manual Gear-Box (Landcruiser)Document6 pagesDesign and Calculation of Five Speed Manual Gear-Box (Landcruiser)Dr. Aung Ko LattNo ratings yet
- Drive ShaftDocument8 pagesDrive ShaftAkshat SharmaNo ratings yet
- 2.5 Familiarization With Power Transmission System ClutchDocument10 pages2.5 Familiarization With Power Transmission System ClutchAravind RajNo ratings yet
- Ch. 6Document34 pagesCh. 6Lê Minh ĐứcNo ratings yet
- CCL ProjectDocument20 pagesCCL ProjectDileep Kumar Manjhi100% (1)
- LAB Manual Automobile-EngineeringDocument34 pagesLAB Manual Automobile-EngineeringManjinderjit SinghNo ratings yet
- Hydrostatic Transmission For Shunting LocomotivesDocument16 pagesHydrostatic Transmission For Shunting LocomotivesDIPAK VINAYAK SHIRBHATENo ratings yet
- Control of Motorcycles by Variable Geometry Rear SuspensionDocument8 pagesControl of Motorcycles by Variable Geometry Rear SuspensionNadhinas Yusuf SNo ratings yet
- ME 323 Lab 4-Omar AlfahadDocument9 pagesME 323 Lab 4-Omar Alfahadengineer.mohammedtahhanNo ratings yet
- Drive ShaftDocument5 pagesDrive ShaftHữu ThiênNo ratings yet
- Wevj 04 00597Document6 pagesWevj 04 00597kevin3ventocilla123No ratings yet
- Design of Transmission System For Go-Kart Vehicle: April 2018Document7 pagesDesign of Transmission System For Go-Kart Vehicle: April 2018Prashant KhopadeNo ratings yet
- Transmission (Mechanics) : Navigation Search Gearbox Software Gear TrainDocument6 pagesTransmission (Mechanics) : Navigation Search Gearbox Software Gear TrainSelva KumarNo ratings yet
- Design Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDocument5 pagesDesign Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDr. Aung Ko Latt100% (1)
- Technical 2Document24 pagesTechnical 2abhishekkumbojiNo ratings yet
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- 13 YMPV螺杆流量计Document20 pages13 YMPV螺杆流量计jackNo ratings yet
- CX360服务培训 4Document46 pagesCX360服务培训 4jackNo ratings yet
- 保养标准及检测程序 -Document20 pages保养标准及检测程序 -jackNo ratings yet
- CX55B Operator ManualDocument222 pagesCX55B Operator ManualjackNo ratings yet
- CX55B Operator ManualDocument222 pagesCX55B Operator ManualjackNo ratings yet
- 液压及电器设备Document84 pages液压及电器设备jackNo ratings yet
- 技术参数Document12 pages技术参数jackNo ratings yet
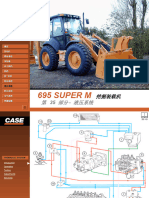
- Chap.8a 695 SM Hydraulics GB ADocument48 pagesChap.8a 695 SM Hydraulics GB AjackNo ratings yet
- 结构件Document58 pages结构件jackNo ratings yet
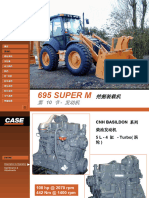
- 发动机Document10 pages发动机jackNo ratings yet
- 结构及功能Document234 pages结构及功能jackNo ratings yet
- CX360服务培训 4Document46 pagesCX360服务培训 4jackNo ratings yet
- Chap.2 695 SM Engines GB ADocument23 pagesChap.2 695 SM Engines GB AjackNo ratings yet
- 04 Electrical System - MT2200 - enDocument50 pages04 Electrical System - MT2200 - enjackNo ratings yet
- 03 Application and Operating - MT2200 - enDocument18 pages03 Application and Operating - MT2200 - enjackNo ratings yet
- 08 Engine and Fuel System - MT2200 - enDocument43 pages08 Engine and Fuel System - MT2200 - enjackNo ratings yet
- 01 Introduction - MT2200 - enDocument12 pages01 Introduction - MT2200 - enjackNo ratings yet
- Boom & BucketDocument43 pagesBoom & BucketjackNo ratings yet
- 05 Control System - MT2200 - enDocument85 pages05 Control System - MT2200 - enjackNo ratings yet
- Flood Lighting FinalDocument12 pagesFlood Lighting Finalprabakar070No ratings yet
- Alimak Super Scando FC ManualDocument71 pagesAlimak Super Scando FC Manualdsn_sarma100% (1)
- 2022 01 MED21A T1-Assessment QestionPaperDocument4 pages2022 01 MED21A T1-Assessment QestionPaperIshmael MvunyiswaNo ratings yet
- K41A - CVT - General InfoDocument60 pagesK41A - CVT - General Infoesquisof86% (7)
- Panasonic KX-FL511 ServiceManualDocument316 pagesPanasonic KX-FL511 ServiceManualLee OnNo ratings yet
- Gear BoxDocument135 pagesGear BoxSubhendu Jana50% (2)
- Design and Analysis of Spur Gear Train For Apu Box in A Manned Aircraft VehicleDocument10 pagesDesign and Analysis of Spur Gear Train For Apu Box in A Manned Aircraft Vehiclechanmyae toeyeeNo ratings yet
- 12 Gearbox PDFDocument42 pages12 Gearbox PDFhenotharenas100% (1)
- TR-3650 Service ManualDocument60 pagesTR-3650 Service Manual2001Silvy86% (7)
- Automatic Wall Plastering Machine: Arunkumar Biradar, Vaibhav Shejwal, Akshay Barate, Sameer BarateDocument11 pagesAutomatic Wall Plastering Machine: Arunkumar Biradar, Vaibhav Shejwal, Akshay Barate, Sameer BarateerpublicationNo ratings yet
- Di 620 Parts ManualDocument106 pagesDi 620 Parts ManualLucas Oliva VicenteNo ratings yet
- Design of Mechatronics SystemsDocument2 pagesDesign of Mechatronics Systemsmundu mustafa100% (1)
- P0751 Shift Solenoid ADocument5 pagesP0751 Shift Solenoid Aeduardo201186No ratings yet
- Worm Gear CatalogDocument64 pagesWorm Gear CatalogChaimaeNo ratings yet
- Oil Tanker PipingDocument38 pagesOil Tanker PipingnikhilNo ratings yet
- Optical 3D Surface MetrologyDocument24 pagesOptical 3D Surface MetrologyBuluc GheorgheNo ratings yet
- Chapter-6: Gear Box: Operation and MechanismDocument47 pagesChapter-6: Gear Box: Operation and MechanismGODNo ratings yet
- 27 - Hofmann - Slew Bearings Brochure - A4Document2 pages27 - Hofmann - Slew Bearings Brochure - A4Jorge VillalobosNo ratings yet
- History: Single-Stage Gear ReducerDocument3 pagesHistory: Single-Stage Gear ReducerZanbeelNo ratings yet
- Catalogue of Thread Rolling MachineDocument14 pagesCatalogue of Thread Rolling MachinelusakeNo ratings yet
- Technical QuestionsDocument8 pagesTechnical QuestionsKartikBNo ratings yet
- 1 Automation and MechatronicsDocument49 pages1 Automation and MechatronicsJEYAVEL PALANISAMYNo ratings yet
- Voice Activated Automatic Self Folding Dining TableDocument5 pagesVoice Activated Automatic Self Folding Dining TablePrince AugustineNo ratings yet
- Pick-Up Turbo - Jaquet Dse 1210.02 AHZDocument2 pagesPick-Up Turbo - Jaquet Dse 1210.02 AHZjuanjo100% (1)
- Design and Modeling of Drum Handling EquipmentDocument9 pagesDesign and Modeling of Drum Handling EquipmentIJIRST100% (1)
- Gear Development by Reverse EngineeringDocument99 pagesGear Development by Reverse EngineeringSuresh YadavNo ratings yet
- How Backlash Affects GearsDocument15 pagesHow Backlash Affects GearsMohammad Ali TaghdiriNo ratings yet
- 1 3Document34 pages1 3Gabriel BalcazarNo ratings yet
- More Than Meets The Eye: Inside The 793F PowertrainDocument13 pagesMore Than Meets The Eye: Inside The 793F PowertrainMisael Josue Castro Huancayo100% (1)