You might also like
- Parts Manual Challenger H2 00 H3 20XMDocument860 pagesParts Manual Challenger H2 00 H3 20XMAicitel2014100% (5)
- Workout Plan RevisedxDocument4 pagesWorkout Plan RevisedxTuvshuu Dri100% (1)
- Aula de Exercícios PDFDocument26 pagesAula de Exercícios PDFLucas MouraNo ratings yet
- Fita 0062 MC2 U1 C2Document24 pagesFita 0062 MC2 U1 C2Mauricio LapierreNo ratings yet
- Rectangular Components of Velocity and Acceleration SCDocument12 pagesRectangular Components of Velocity and Acceleration SCLEAH ROSALNo ratings yet
- Distance Covered by Car A Distance Covered by Car B, After Reduction of Speed 45Document18 pagesDistance Covered by Car A Distance Covered by Car B, After Reduction of Speed 45Amish RaiNo ratings yet
- Factorizacion y Formula GralDocument6 pagesFactorizacion y Formula GralBetyNo ratings yet
- Unit II ODEDocument89 pagesUnit II ODENivashini VindhyaNo ratings yet
- Math 1 Resit Solutions For Students 1Document12 pagesMath 1 Resit Solutions For Students 1jasperNo ratings yet
- 03Document5 pages03Sadid HossainNo ratings yet
- Tarea 5-Ecuaciones DiferencialesDocument8 pagesTarea 5-Ecuaciones DiferencialesReal NofakeNo ratings yet
- Tarea 5-Ecuaciones DiferencialesDocument8 pagesTarea 5-Ecuaciones DiferencialesReal NofakeNo ratings yet
- Lecture 2 D.E.Document8 pagesLecture 2 D.E.nvn15964No ratings yet
- Lecture 22 Continuity and Partial Derivatives MTH165Document18 pagesLecture 22 Continuity and Partial Derivatives MTH165James PrakashNo ratings yet
- Engr - Jessa Mae A. Gomez: InstructorDocument31 pagesEngr - Jessa Mae A. Gomez: Instructorjanneth fajutina100% (1)
- Applied Mathematics Unit 2 - March 6, 2021Document8 pagesApplied Mathematics Unit 2 - March 6, 2021JaredNo ratings yet
- Ecuaciones Iiisemianual IDocument53 pagesEcuaciones Iiisemianual IRenzo SantillanNo ratings yet
- 04 03Document11 pages04 03Sadid HossainNo ratings yet
- m1g r3 Clase Sc23Document58 pagesm1g r3 Clase Sc23aldana michelle pardoNo ratings yet
- Pmath3 4Document18 pagesPmath3 4ak9199042No ratings yet
- 2) Simpson's Integral Rule:: ExampleDocument2 pages2) Simpson's Integral Rule:: ExampleNoor MohammedNo ratings yet
- PM-Bracket Removal and Factorisation PDFDocument5 pagesPM-Bracket Removal and Factorisation PDFfifak44760No ratings yet
- Persamaan Differensial ExactDocument19 pagesPersamaan Differensial Exactindah100% (1)
- Adma G.C.E P1 2020 SolutionsDocument11 pagesAdma G.C.E P1 2020 SolutionsChikuta ShingaliliNo ratings yet
- Cónicas IDocument5 pagesCónicas IAli QuirozNo ratings yet
- Lecture 5Document11 pagesLecture 5Red ManNo ratings yet
- FreddyAntonioEspejoSerrano A3Document13 pagesFreddyAntonioEspejoSerrano A3Freddy EspejoNo ratings yet
- Física I. Formulario Básico: Errores VectoresDocument1 pageFísica I. Formulario Básico: Errores VectoresKaty Ramírez100% (1)
- Ecuaciones Diferenciales: Sergio Loyola RamirezDocument13 pagesEcuaciones Diferenciales: Sergio Loyola RamirezSergio Loyola RamirezNo ratings yet
- 2018-Viii Matematika-Sma Olimpiade SolusiDocument13 pages2018-Viii Matematika-Sma Olimpiade Solusinanda awaliaNo ratings yet
- Functions 2.6 AssessmentDocument7 pagesFunctions 2.6 AssessmentbriNo ratings yet
- Differentiation of Differential Coefficient: Let y Be A Function of X I.E. y F (X), LetDocument5 pagesDifferentiation of Differential Coefficient: Let y Be A Function of X I.E. y F (X), LetMeghaNo ratings yet
- Lec2.Velocity and Acceleration by Egnr. Wendhel Q.LDocument34 pagesLec2.Velocity and Acceleration by Egnr. Wendhel Q.Ljames PrincipeNo ratings yet
- Assignment Fluid MechanicsDocument8 pagesAssignment Fluid MechanicsPhanna MongNo ratings yet
- 03 02Document11 pages03 02Sadid HossainNo ratings yet
- Practica #1 Calculo II BDocument4 pagesPractica #1 Calculo II BPablo MamaniNo ratings yet
- Nivelación de Matemática - Gestión S13.S1 Ecuaciones E Inecuaciones Lineales Tarea DomiciliariaDocument5 pagesNivelación de Matemática - Gestión S13.S1 Ecuaciones E Inecuaciones Lineales Tarea DomiciliariaMartin ReyesNo ratings yet
- Solution Examen s1 2020 2021Document9 pagesSolution Examen s1 2020 2021Ibrahim BenarousNo ratings yet
- Chapter 3 Worked SolutionsDocument149 pagesChapter 3 Worked Solutionscormac molloyNo ratings yet
- Lecture 9Document27 pagesLecture 9Yovan CarvalloNo ratings yet
- PRACTICA 2 - Solucion de Una ED. 2024Document4 pagesPRACTICA 2 - Solucion de Una ED. 2024Antonio RicaldezNo ratings yet
- Ecuatii ExponentialeDocument5 pagesEcuatii ExponentialeAnamaria PetricaNo ratings yet
- Integration SummaryDocument5 pagesIntegration SummarySweekrut SahooNo ratings yet
- Integral CalculusDocument70 pagesIntegral Calculuslynser chua100% (1)
- Solution:: Standard Integral FormulaDocument9 pagesSolution:: Standard Integral FormulaXubayerNo ratings yet
- Chain Rule & Implicit DifferentiationDocument10 pagesChain Rule & Implicit DifferentiationIkeNo ratings yet
- Bebas LinearDocument21 pagesBebas LinearnurohhfauziiiNo ratings yet
- Practice Problem (Differentiation)Document1 pagePractice Problem (Differentiation)Azman Hossain OakingNo ratings yet
- Lateral A & HDocument8 pagesLateral A & HArt AV B LimNo ratings yet
- Diff Eq1Document13 pagesDiff Eq1avin avinNo ratings yet
- Midterm Exercises - SolvedDocument6 pagesMidterm Exercises - SolvedclemencetrinNo ratings yet
- Taller Calificado N°15. Calculo IDocument13 pagesTaller Calificado N°15. Calculo IBryan ReyesNo ratings yet
- MATH 201 - Chapter 2 - Solutions of Some First Order Differential Equations - Exact Differential EquationDocument6 pagesMATH 201 - Chapter 2 - Solutions of Some First Order Differential Equations - Exact Differential EquationEpong FaraonNo ratings yet
- Math 114 - Module 3.3 - Additional Topics On Equations of Order OneDocument101 pagesMath 114 - Module 3.3 - Additional Topics On Equations of Order OneClaire TaborNo ratings yet
- Correction TD - SollicitationDocument9 pagesCorrection TD - SollicitationCOURS RDM 2017No ratings yet
- O Level A Maths 2014 Paper 1Document9 pagesO Level A Maths 2014 Paper 1Lawrence Lim Ah KowNo ratings yet
- Chapter 2 Exact DEDocument11 pagesChapter 2 Exact DERianjessNo ratings yet
- Exam 2Document17 pagesExam 2Thảo HươngNo ratings yet
- 03 - Partial Derivatives of Functions PDFDocument13 pages03 - Partial Derivatives of Functions PDFzul hilmiNo ratings yet
- Differential Equation - Examples of Coefficients Linear in Two VariablesDocument5 pagesDifferential Equation - Examples of Coefficients Linear in Two VariablesAimi Najwa ZailanNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Ch.4 Nuclear PowerplantDocument32 pagesCh.4 Nuclear Powerplantengineer.mohammedtahhanNo ratings yet
- Mohammed Ahmed Tahhan 392027113 HW7 SH2Document1 pageMohammed Ahmed Tahhan 392027113 HW7 SH2engineer.mohammedtahhanNo ratings yet
- ME 3301 1113 Assignment 1Document2 pagesME 3301 1113 Assignment 1engineer.mohammedtahhanNo ratings yet
- Assingment 6Document1 pageAssingment 6engineer.mohammedtahhanNo ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedengineer.mohammedtahhanNo ratings yet
- ME 3301 1113 Revision AssignmentDocument14 pagesME 3301 1113 Revision Assignmentengineer.mohammedtahhanNo ratings yet
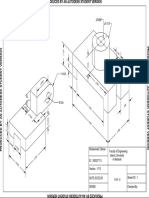
- Mohammed Ahmed Tahhan 393027113 Mid1 ME DrawignDocument2 pagesMohammed Ahmed Tahhan 393027113 Mid1 ME Drawignengineer.mohammedtahhanNo ratings yet
- Mohammed Ahmed Tahhan-392027113-HW4-MEdrawingDocument1 pageMohammed Ahmed Tahhan-392027113-HW4-MEdrawingengineer.mohammedtahhanNo ratings yet
- Mohammed Ahmed Tahhn-392027113-Hw6-MEdrawing-Sheat No1Layout3Document1 pageMohammed Ahmed Tahhn-392027113-Hw6-MEdrawing-Sheat No1Layout3engineer.mohammedtahhanNo ratings yet
- Lab3 TheoryDocument8 pagesLab3 Theoryengineer.mohammedtahhanNo ratings yet
- Project 4-Last OneDocument10 pagesProject 4-Last Oneengineer.mohammedtahhanNo ratings yet
- ME 323 Lab 4 Mohammed Ahmed Tahhan 392027113Document10 pagesME 323 Lab 4 Mohammed Ahmed Tahhan 392027113engineer.mohammedtahhanNo ratings yet
- ME - 323 - Lab - 2 - Mohammed Ahmed Tahhan - 392027113Document7 pagesME - 323 - Lab - 2 - Mohammed Ahmed Tahhan - 392027113engineer.mohammedtahhanNo ratings yet
- Lab Report Latte - Group 2Document9 pagesLab Report Latte - Group 2engineer.mohammedtahhanNo ratings yet
- ME 334 576 Lab 3Document8 pagesME 334 576 Lab 3engineer.mohammedtahhanNo ratings yet
- New Keystone LD U2 - Student's EditionDocument72 pagesNew Keystone LD U2 - Student's EditionDr.Rashed AlawamlehNo ratings yet
- PWT1 Ix - 23Document5 pagesPWT1 Ix - 23R Bhavani SankarNo ratings yet
- HCV Persistence: Cure Is Still A Four Letter Word: See Article On Page 106Document3 pagesHCV Persistence: Cure Is Still A Four Letter Word: See Article On Page 106bmnlthyukNo ratings yet
- L4 Introduction To Travel Tourism and Hospitality Dec11Document7 pagesL4 Introduction To Travel Tourism and Hospitality Dec11As HerlambangNo ratings yet
- IG3 Chapter 2Document39 pagesIG3 Chapter 2Dishita AgrawalNo ratings yet
- Hyundai PPT AmitDocument17 pagesHyundai PPT AmitAmit RauniyarNo ratings yet
- 132kv GISDocument208 pages132kv GISVivek Khedgaonkar100% (5)
- Chapter 1-5 Group 2Document24 pagesChapter 1-5 Group 2Johnbill Barangan80% (5)
- ch5 Settlement of BuildingsDocument33 pagesch5 Settlement of BuildingsRafi Mahmoud SulaimanNo ratings yet
- Farfantepenaeus Brasiliensis PDFDocument2 pagesFarfantepenaeus Brasiliensis PDFMattNo ratings yet
- SL020 PDFDocument3 pagesSL020 PDFchidambaram kasiNo ratings yet
- Musuem Case StudyDocument39 pagesMusuem Case Studykhushi agarwal100% (1)
- The Divine Secret of Nothing by Vincent MoralesDocument227 pagesThe Divine Secret of Nothing by Vincent Moralesh_vincent_m6715No ratings yet
- EIU1 AIO TT2 Level3 PDFDocument3 pagesEIU1 AIO TT2 Level3 PDFminoro2583No ratings yet
- SAP2000 Tutorial Temperature LoadingDocument10 pagesSAP2000 Tutorial Temperature LoadingBabagenral100% (1)
- Quicklink Networks Janitor Imbs 2.0 2Document1 pageQuicklink Networks Janitor Imbs 2.0 2Vrujesh BhattNo ratings yet
- Battle of Tannenberg LineDocument10 pagesBattle of Tannenberg LineblurbNo ratings yet
- Sanctorom of Goddess Padmavathi EnglishDocument85 pagesSanctorom of Goddess Padmavathi EnglishsanathandharmaNo ratings yet
- Heinz Avs310 Modern Flight Tracking GradedDocument6 pagesHeinz Avs310 Modern Flight Tracking Gradedapi-290806305No ratings yet
- Chapter 9 - The Power of Calculus PDFDocument24 pagesChapter 9 - The Power of Calculus PDFKaran ShahNo ratings yet
- AMBA PDFDocument14 pagesAMBA PDFSHUKLA NISHANTNo ratings yet
- 1734.do Alligators Eat DucksDocument4 pages1734.do Alligators Eat DuckstvrNo ratings yet
- Energy IsolamentoDocument24 pagesEnergy IsolamentoArtur KinalNo ratings yet
- OD2e L5 Tests Unit 2Document2 pagesOD2e L5 Tests Unit 2gilbert silva0% (1)
- Air and Missile Defense Systems EngineeringDocument268 pagesAir and Missile Defense Systems Engineeringcaranmiroslav100% (2)
- Brigada Eskwela Individual Plan 2019Document1 pageBrigada Eskwela Individual Plan 2019Arangote GlennNo ratings yet
- Annualreport2010-11 2Document128 pagesAnnualreport2010-11 2Gaurav MunoliNo ratings yet
- Well Completion and Stimulation - Chapter 3 Well Performance Analysis-NewDocument56 pagesWell Completion and Stimulation - Chapter 3 Well Performance Analysis-NewsouthliNo ratings yet