You might also like
- A A JIMOH NewDocument49 pagesA A JIMOH NewOlawale John Adeoti100% (1)
- Steel Pipe Pile ASTM A252 PDFDocument4 pagesSteel Pipe Pile ASTM A252 PDFfikriy_civil86No ratings yet
- CPB 30004 - CHAPTER 1 - INTRO Sept 2014Document52 pagesCPB 30004 - CHAPTER 1 - INTRO Sept 2014Ashwin MNo ratings yet
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocument38 pagesVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model Shownlesly100% (1)
- Atta Main ReportDocument47 pagesAtta Main ReportOlawale John Adeoti100% (1)
- Rock Characterization at El Teniente Mine PDFDocument15 pagesRock Characterization at El Teniente Mine PDFEmanuel NicolásNo ratings yet
- FIT BIO 1010 Exam 3 ReviewDocument87 pagesFIT BIO 1010 Exam 3 Reviewminh6aNo ratings yet
- D 1331 - 89 R01 - RdezmzeDocument3 pagesD 1331 - 89 R01 - Rdezmzejamaljamal20No ratings yet
- Biosystems Ba400 PDFDocument132 pagesBiosystems Ba400 PDFأنور مازوز أبو يوسف100% (2)
- ISRM CodesDocument9 pagesISRM CodesAvijit DeyNo ratings yet
- Control System Instrumentation: Transducers and TransmittersDocument7 pagesControl System Instrumentation: Transducers and Transmitters李承家No ratings yet
- Chapter 9 ChangDocument37 pagesChapter 9 Changsatya sagarNo ratings yet
- Control System Instrumentation: Transducers and TransmittersDocument25 pagesControl System Instrumentation: Transducers and TransmittersKate SongNo ratings yet
- ERT 321 Process Control & DynamicsDocument49 pagesERT 321 Process Control & Dynamicshakita86No ratings yet
- Chapter 9.simulation ControlDocument24 pagesChapter 9.simulation ControlAudrey Patrick KallaNo ratings yet
- Chapter 9 - InstrumentationDocument18 pagesChapter 9 - InstrumentationAdner RomeroNo ratings yet
- Control Chapter 5 - RemoteDocument87 pagesControl Chapter 5 - RemoteJhonny PerezNo ratings yet
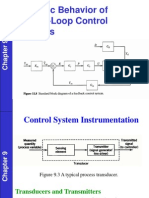
- Dynamic Behavior of Closed-Loop Control SystemsDocument24 pagesDynamic Behavior of Closed-Loop Control SystemsBhowmickNo ratings yet
- ChE 404-Chapter 08Document38 pagesChE 404-Chapter 08aliNo ratings yet
- Control DynamicDocument10 pagesControl Dynamicكرار نعيم100% (1)
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Control Chapter 5 - RemoteDocument86 pagesControl Chapter 5 - RemoteWilmar Antonio Zuluaga ArangoNo ratings yet
- KMM411E - Lesson7a - Feedback Controllers - 14nov2022Document56 pagesKMM411E - Lesson7a - Feedback Controllers - 14nov2022hairen jegerNo ratings yet
- Instrumentation Process 2014.12.31 PDFDocument14 pagesInstrumentation Process 2014.12.31 PDFFadlul RamadhanNo ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
- Unit 3Document67 pagesUnit 3Raghul T100% (1)
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 pagesClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARNo ratings yet
- PB Vs GainDocument6 pagesPB Vs Gainابزار دقیقNo ratings yet
- PDC Chapter 8Document49 pagesPDC Chapter 8satya sagarNo ratings yet
- Project Report On OPDocument13 pagesProject Report On OPVarun PathaniaNo ratings yet
- Document CTDocument88 pagesDocument CTdlj1988No ratings yet
- Chapter 9Document17 pagesChapter 9Sagar PawarNo ratings yet
- Chap1 Indus ElectronicsDocument47 pagesChap1 Indus ElectronicsSantosh Kumar BejugamNo ratings yet
- Control System InstrumentationDocument88 pagesControl System Instrumentationyeay_me100% (1)
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- Implementation of LCC HVDC Converter TransformerDocument6 pagesImplementation of LCC HVDC Converter Transformerdhuamani01No ratings yet
- Process Dynamics and Control: Chapter 8 LecturesDocument33 pagesProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNo ratings yet
- Process Control CHP 5Document29 pagesProcess Control CHP 5dododoorNo ratings yet
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiNo ratings yet
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNo ratings yet
- EE 322 Control TheoryDocument37 pagesEE 322 Control TheoryshrnbolonneNo ratings yet
- Chapter 5Document39 pagesChapter 5Portia ShilengeNo ratings yet
- LM2907Document21 pagesLM2907leorio88No ratings yet
- Lecture 1011 TeamDocument70 pagesLecture 1011 TeamAmitav BaruaNo ratings yet
- TLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Document13 pagesTLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Larbi_Lakrout_7056No ratings yet
- ME6702 NotesDocument62 pagesME6702 NotesKanda SamyNo ratings yet
- Wcecs2009 - pp545-549 Computer LoadsDocument5 pagesWcecs2009 - pp545-549 Computer LoadsYogesh MsdNo ratings yet
- Process Gain and Loop Gain: Ma Output Ma CS Input F FDocument5 pagesProcess Gain and Loop Gain: Ma Output Ma CS Input F FNeeraj JagtapNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- One Cycle ControlDocument9 pagesOne Cycle ControlNithin SebastianNo ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- Water Flow Control System V2 PDFDocument12 pagesWater Flow Control System V2 PDFAayushSrivastava100% (1)
- Optimizing The Load Transient Response of The Buck ConverterDocument7 pagesOptimizing The Load Transient Response of The Buck ConverterNéstor BernalNo ratings yet
- BUCK Driver: MicroprocessorDocument9 pagesBUCK Driver: MicroprocessorMehroz KhanNo ratings yet
- BUCK Driver: MicroprocessorDocument9 pagesBUCK Driver: MicroprocessorMehroz KhanNo ratings yet
- Basic Concept of Process Control SystemDocument29 pagesBasic Concept of Process Control Systemhabtemariam mollaNo ratings yet
- 2255-1 ManualDocument6 pages2255-1 Manualgloriyeah2003No ratings yet
- DR20Document136 pagesDR20Daryl Asto MercadoNo ratings yet
- Process Control CHP5Document29 pagesProcess Control CHP5Martha AlbaNo ratings yet
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDocument7 pagesFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidNo ratings yet
- CLL 361 Instrumentation & Automation: Munawar A. ShaikDocument28 pagesCLL 361 Instrumentation & Automation: Munawar A. ShaikRakeshKumarNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignFrom EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- SL045016-D-PP: Cylindrical Roller BearingDocument2 pagesSL045016-D-PP: Cylindrical Roller BearingOlawale John AdeotiNo ratings yet
- Mercy PrayerDocument2 pagesMercy PrayerOlawale John AdeotiNo ratings yet
- Information Guide: CAT Dealer Prep ProgramDocument18 pagesInformation Guide: CAT Dealer Prep ProgramOlawale John AdeotiNo ratings yet
- Generator Fundamentals OutlineDocument3 pagesGenerator Fundamentals OutlineOlawale John AdeotiNo ratings yet
- Your Study Contract: Olawale Adeoti 70 Makaranta Street, Ugwan Yelwa Kaduna 70 NGDocument5 pagesYour Study Contract: Olawale Adeoti 70 Makaranta Street, Ugwan Yelwa Kaduna 70 NGOlawale John AdeotiNo ratings yet
- The SKF Microlog Series Catalogue: The Industry's Premier Portable, Handheld Data Collector and AnalyzerDocument24 pagesThe SKF Microlog Series Catalogue: The Industry's Premier Portable, Handheld Data Collector and AnalyzerOlawale John AdeotiNo ratings yet
- SKF Microlog Analyzer Accessories CatalogDocument48 pagesSKF Microlog Analyzer Accessories CatalogOlawale John Adeoti100% (1)
- Linkedin Checklist: Photo Background Image Url HeadlineDocument2 pagesLinkedin Checklist: Photo Background Image Url HeadlineOlawale John AdeotiNo ratings yet
- RW 0004PhotovoltaicsRev5Document4 pagesRW 0004PhotovoltaicsRev5Olawale John AdeotiNo ratings yet
- SKF SYSTEM 24 Single Point Automatic Lubricator LAGD 125 and LAGD 60 - 012732Document3 pagesSKF SYSTEM 24 Single Point Automatic Lubricator LAGD 125 and LAGD 60 - 012732Olawale John AdeotiNo ratings yet
- Mmen503 NewDocument26 pagesMmen503 NewOlawale John AdeotiNo ratings yet
- Ahmadu Bello University, Zaria: NA NA NA 2 NA NA NA NA NA NA NA NADocument2 pagesAhmadu Bello University, Zaria: NA NA NA 2 NA NA NA NA NA NA NA NAOlawale John AdeotiNo ratings yet
- ProposalDocument4 pagesProposalOlawale John AdeotiNo ratings yet
- Ahmadu Bello University: Payer InformationDocument1 pageAhmadu Bello University: Payer InformationOlawale John AdeotiNo ratings yet
- DocDocument2 pagesDocOlawale John AdeotiNo ratings yet
- Working With Layout: What You Will LearnDocument10 pagesWorking With Layout: What You Will LearnOlawale John AdeotiNo ratings yet
- 501 PQDocument10 pages501 PQOlawale John AdeotiNo ratings yet
- Student Industrial Work Experience Scheme (Siwes) PresentationDocument10 pagesStudent Industrial Work Experience Scheme (Siwes) PresentationOlawale John AdeotiNo ratings yet
- Department of Communications EngineeringDocument9 pagesDepartment of Communications EngineeringOlawale John AdeotiNo ratings yet
- The Wet Strength of Water-And Foam-Laid Cellulose Sheets Prepared With Polyamideamine-Epichlorohydrin (PAE) ResinDocument7 pagesThe Wet Strength of Water-And Foam-Laid Cellulose Sheets Prepared With Polyamideamine-Epichlorohydrin (PAE) ResinAji SyarifudinNo ratings yet
- 152 - HARDOX - 500 - UK - Data Sheet PDFDocument2 pages152 - HARDOX - 500 - UK - Data Sheet PDFneto-portoNo ratings yet
- A Laboratory Exercise Introducing Students-Co-Pourbaix-powell1987Document3 pagesA Laboratory Exercise Introducing Students-Co-Pourbaix-powell1987Leonardo MendozaNo ratings yet
- Flotation Technical PaperDocument6 pagesFlotation Technical PaperJb Cailao jr100% (1)
- Seminar Report 2 EgrDocument20 pagesSeminar Report 2 EgrAnson DsouzaNo ratings yet
- Grit ChambersDocument28 pagesGrit ChambersmkkNo ratings yet
- Boundary Layer Velocity ProfileDocument19 pagesBoundary Layer Velocity ProfileSabir Ahmed100% (1)
- Norm Mühendislik Presentation REV1Document28 pagesNorm Mühendislik Presentation REV1Can SaracogluNo ratings yet
- Ads Acryleze Form Proc Cons v2!07!2009Document4 pagesAds Acryleze Form Proc Cons v2!07!2009huynhvinhquangNo ratings yet
- Boiling Point and PressureDocument4 pagesBoiling Point and PressureMsAnn000100% (2)
- The Blotter Spot Method - Sample Preparation and Test ProcedureDocument4 pagesThe Blotter Spot Method - Sample Preparation and Test ProcedureshakerNo ratings yet
- Preparation of Stained Temporary Mounts of Onion PeelDocument2 pagesPreparation of Stained Temporary Mounts of Onion PeelAnirudh100% (1)
- Heat Transfer in Natural ConvectionDocument4 pagesHeat Transfer in Natural ConvectionkoushikaerosNo ratings yet
- Lecture 2 StrengthsDocument9 pagesLecture 2 StrengthsCarlos Augustus GonzalezNo ratings yet
- Sayers 2013 Geophysical ProspectingDocument3 pagesSayers 2013 Geophysical ProspectingdownbuliaoNo ratings yet
- GLP Self-Evaluation Guidelines EngDocument85 pagesGLP Self-Evaluation Guidelines EnggustavoesanchezNo ratings yet
- LP 5-403Document3 pagesLP 5-403Nurashida HaliminNo ratings yet
- 02 - Coordination CompoundsDocument8 pages02 - Coordination CompoundsNithin KarthikeyanNo ratings yet
- CMME 2 ReportDocument7 pagesCMME 2 ReportMicro YuchenNo ratings yet
- Mcq-Sol, Elctro, Chemical Kine PDFDocument24 pagesMcq-Sol, Elctro, Chemical Kine PDFTaranjot SinghNo ratings yet
- Itron TZ en ManualDocument47 pagesItron TZ en Manualdilor19No ratings yet
- Fecal Sludge DPRDocument56 pagesFecal Sludge DPRsharan kommi100% (1)
- 03 PDFDocument26 pages03 PDFAnonymous sfkedkymNo ratings yet
- Biology f211 Mixed Question PaperDocument191 pagesBiology f211 Mixed Question Paperapi-275024237No ratings yet